一种垂直升降的飞行器及控制方法与流程
本发明涉及飞行器,尤其涉及一种垂直升降的飞行器及控制方法。
背景技术:
1、垂直起降飞行器既可以像多旋翼飞行器或直升机一样垂直起降,又可以像固定翼飞机一样高速飞行,具有十分广阔的应用前景。
2、目前的垂直起降飞行器的动力系统兼顾垂直与水平飞行,但无法使每一种工况都处于最高的效率,尤其是垂直起降飞行器在飞行时多个水平旋翼系统具有重量大、阻力高的缺点,使得飞行器在不同工况下的传动效率不同,使得垂直起降飞行器的飞行姿态单一,无法满足飞行需求。
3、因此,如何提高直起降飞行器的效率,是本领域亟待解决的重要问题之一。
技术实现思路
1、本发明的目的在于提供一种垂直升降的飞行器及控制方法,以解决直起降飞行器传动功率低导致的飞行器飞行姿态单一的问题。
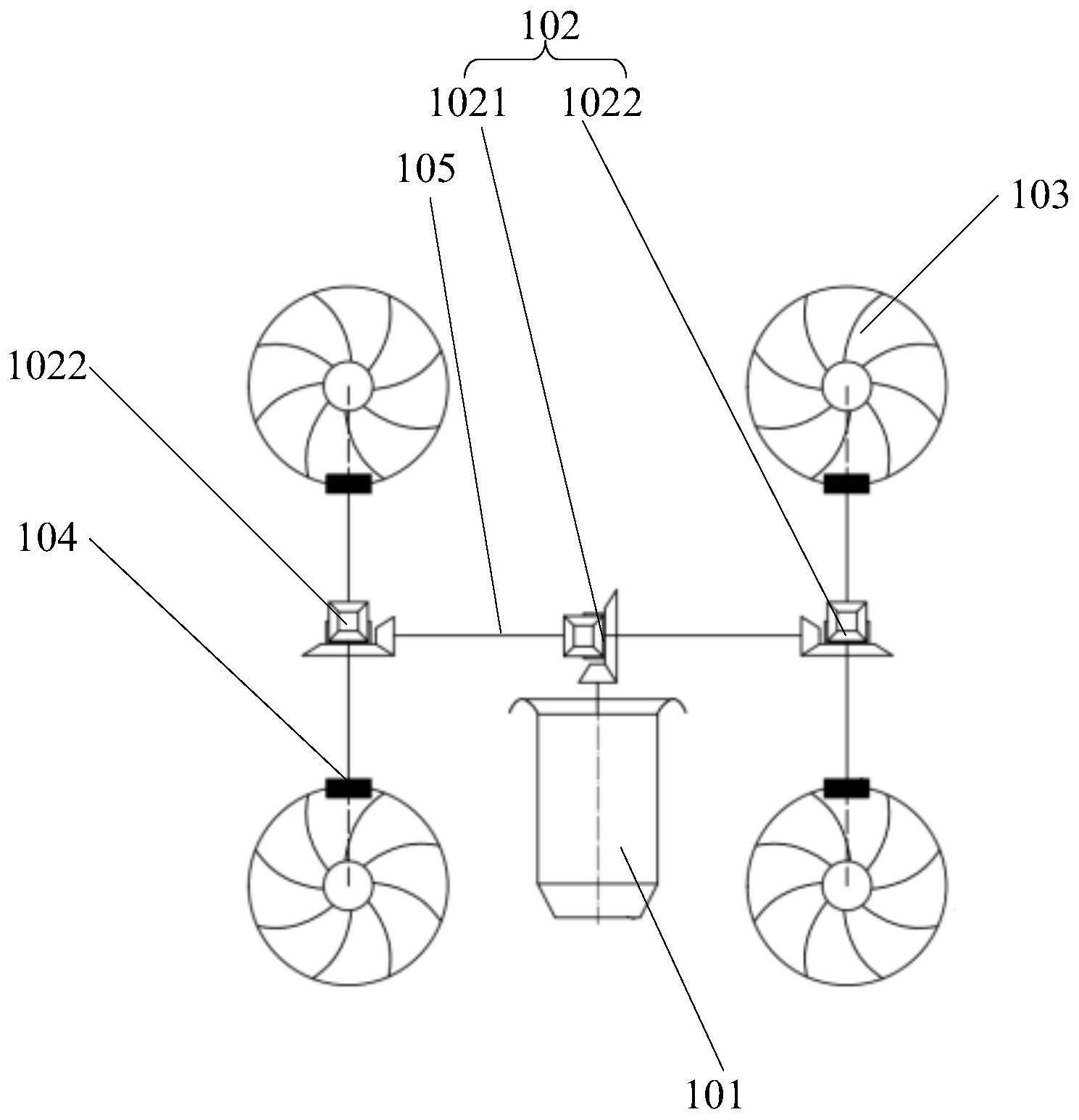
2、本发明提供了一种垂直升降的飞行器,包括驱动装置、差速传动装置、传动轴、刹车装置、控制器、第一转速传感器以及多个升力风扇;
3、驱动装置和差速传动装置通过传动轴连接,差速传动装置和升力风扇通过传动轴连接;
4、刹车装置设在升力风扇上;
5、控制器分别与刹车装置和第一转速传感器电连接;
6、第一转速传感器用于采集升力风扇的转速,若升力风扇的转速大于或等于预设速度,控制器用于控制刹车装置对升力风扇刹车,若升力风扇的转速小于预设速度,控制器用于控制刹车装置对升力风扇停止刹车。
7、优选的,差速传动装置的数量为至少一个。
8、优选的,升力风扇的数量为四个。
9、优选的,差速传动装置包括第一差速器和两个第二差速器;
10、第一差速器的输入轴与驱动装置传动连接,两个第二差速器的输入轴分别与第一差速器的两输出轴传动连接;
11、四个升力风扇分别与两个第二差速器的输出轴传动连接。
12、优选的,四个升力风扇的几何中心位于一矩形的四个顶点处。
13、优选的,第一差速器包括主传动齿轮、从动传动齿轮、第一传动齿轮、第二传动齿轮以及行星齿轮,主传动齿轮和从动传动齿轮转动连接,第一传动齿轮与从动传动齿轮同轴连接,第一传动齿轮、第二传动齿轮以及行星齿轮可转动连接。
14、优选的,第二差速器与第一差速器具有相同的结构。
15、优选的,当第一传动齿轮以及第二传动齿轮转速不同时,行星齿轮开始转动,行星齿轮转动驱动第一传动齿以及第二传动开始转动。
16、优选的,控制方法应用于上述的垂直升降的飞行器,垂直升降的飞行器的控制方法包括:
17、获取姿态变换操控指令;
18、根据操控指令解析出各升力风扇的目标转速;
19、确定目标转速低于当前转速的升力风扇;
20、在不改变驱动装置功率的情况下,对目标转速低于当前转速的升力风扇制动,以通过差速传动装置提升未制动的升力风扇的转速。
21、优选的,垂直升降的飞行器的控制方法还包括,在获取升降指令后,同时操控所有的刹车装置和驱动装置,以实现垂直升降的飞行器升降。
22、与现有技术相比,本发明提供的垂直升降的飞行器中,驱动装置和差速传动装置通过传动轴连接,差速传动装置和升力风扇通过传动轴连接,刹车装置设在升力风扇上,驱动装置驱动传动轴转动,传动轴转动带动与传动轴连接的差速传动装置运动,差速传动装置运动带动与升力风扇连接的传动轴转动,在传动轴的驱动下驱动升力风扇转动,升力风扇的转动或者停止可以为升力风扇提供升力,升力风扇通过升力可以实现飞行器的上升或者下降,通过传动轴将驱动装置与差速传动装置连接起来,驱动装置可以对差速传动装置驱动,通过差速传动装置实现对不同传动轴的降速或者增速,从而使得不同的升力风扇的转速不同。基于此,控制器分别与刹车装置和第一转速传感器电连接,第一转速传感器用于采集升力风扇的转速,若升力风扇的转速大于或等于预设速度,控制器用于控制刹车装置对升力风扇刹车,若升力风扇的转速小于预设速度,控制器用于控制刹车装置对升力风扇停止刹车,通过控制器控制刹车装置,从而通过刹车装置改变升力风扇的转速,升力风扇的转速改变会导致飞行器出现不同的飞行姿态,从而实现对飞行器的飞行姿态的一种控制,有效解决了直起降飞行器传动功率低导致的飞行器飞行姿态单一的问题。
23、在此基础上,上述垂直升降的飞行器还提供了一种垂直升降的飞行器的控制方法,该垂直升降的飞行器的控制方法包括了上述垂直升降的飞行器的有益效果,同时,在不改变驱动装置功率的情况下,对目标转速低于当前转速的升力风扇制动,以通过差速传动装置提升未制动的升力风扇的转速,还可以实现升力风扇的高功率输出。
技术特征:
1.一种垂直升降的飞行器,其特征在于,包括驱动装置、差速传动装置、传动轴、刹车装置、控制器、第一转速传感器以及多个升力风扇;
2.根据权利要求1所述的垂直升降的飞行器,其特征在于,所述差速传动装置的数量为至少一个。
3.根据权利要求1所述的垂直升降的飞行器,其特征在于,所述升力风扇的数量为四个。
4.根据权利要求3所述的垂直升降的飞行器,其特征在于,所述差速传动装置包括第一差速器和两个第二差速器;
5.根据权利要求3所述的垂直升降的飞行器,其特征在于,四个所述升力风扇的几何中心位于一矩形的四个顶点处。
6.根据权利要求4所述的垂直升降的飞行器,其特征在于,所述第一差速器包括主传动齿轮、从动传动齿轮、第一传动齿轮、第二传动齿轮以及行星齿轮,所述主传动齿轮和所述从动传动齿轮转动连接,所述第一传动齿轮与所述从动传动齿轮同轴连接,所述第一传动齿轮、所述第二传动齿轮以及所述行星齿轮可转动连接。
7.根据权利要求4所述的垂直升降的飞行器,其特征在于,所述第二差速器与所述第一差速器具有相同的结构。
8.根据权利要求6所述的垂直升降的飞行器,其特征在于,当所述第一传动齿轮以及所述第二传动齿轮转速不同时,所述行星齿轮开始转动,所述行星齿轮转动驱动所述第一传动齿以及所述第二传动开始转动。
9.一种垂直升降的飞行器的控制方法,其特征在于,所述控制方法应用于权利要求1-8任一项所述的垂直升降的飞行器,所述垂直升降的飞行器的控制方法包括:
10.根据权利要求9所述的垂直升降的飞行器的控制方法,其特征在于,所述垂直升降的飞行器的控制方法还包括,在获取升降指令后,同时操控所有的所述刹车装置和所述驱动装置,以实现所述垂直升降的飞行器升降。
技术总结
本发明公开一种垂直升降的飞行器及控制方法,以解决直起降飞行器传动功率低导致的飞行器飞行姿态单一的问题。垂直升降的飞行器,包括驱动装置、差速传动装置、传动轴、刹车装置、控制器、第一转速传感器以及多个升力风扇;驱动装置和差速传动装置通过传动轴连接,差速传动装置和升力风扇通过传动轴连接;刹车装置设在升力风扇上;控制器分别与刹车装置和第一转速传感器电连接;第一转速传感器用于采集升力风扇的转速,若升力风扇的转速大于或等于预设速度,控制器用于控制刹车装置对升力风扇刹车。本发明提供的垂直升降的飞行器及控制方法用于飞行器中。
技术研发人员:刘金龙,周琨,孙培培,刘帅,王佰智
受保护的技术使用者:中国航空发动机研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!