一种基于分布式无缝柔性舵面和可动翼尖的变体飞行器
本发明属于航空飞行器,涉及一种变体飞行器,具体涉及一种基于分布式无缝柔性舵面和可动翼尖的变体飞行器。
背景技术:
1、随着材料科学、控制科学、制造业的不断发展,航空工程从诞生至今发生了巨大的变革,但目前航空飞行器还尚未做到像鸟类一样高效灵活的飞行。鸟类仅仅只靠一双可以柔性变形的翅膀,根据飞行状态实时调整飞行姿态,面对不同的飞行环境都能以最佳效率飞行,并且能够同时满足巡航的低阻力需求、着陆的高升力大阻力需求、转弯的非对称升力需求等不同需求。
2、飞行器在空中所受的气动力直接影响飞行性能,而气动力由几何外形决定。现有航空飞行器的几何外形一般是固定的,不能像鸟类一样通过改变自身机翼形状来获取最佳的气动特性,因而只能做一些特定的飞行和完成一些专门的任务。为了同时满足巡航、起降、转弯等不同工况下的飞行需求,还需要在刚性机翼的表面对应设置不同的装置,如襟翼、副翼、襟副翼、扰流板等,这些装置功能单一、使用效率低,而且刚性机构的作动方式导致机翼表面在偏转和过渡处存在表面突转和间隙,造成了气动效率低和气动噪声大等问题。
3、变体飞行器是指能够在飞行中改变气动外形,如机翼面积、展弦比和后掠角等,在不同飞行状态下性能保持最佳的飞行器。与常规固定翼飞行器相比,变体飞行器的飞行包线更宽,飞行效率更高,可以兼顾巡航、起降、机动等多任务需求。变体飞行器在总体设计上的思想和方法与常规飞行器有所不同,必须考虑多学科交叉综合,通过总体及气动协调优化设计以保证其在不同飞行条件下均有较好的气动性能。随着飞行器设计对于高机动性、高飞行效率和多任务适应能力等综合设计需求的不断提高,像鸟类一样高效灵活的变体飞行器已经成为学术界和工程界的研究热点。
4、因此,本发明提出一种基于分布式无缝柔性舵面和可动翼尖的变体飞行器。
技术实现思路
1、本发明提出了一种基于分布式无缝柔性舵面和可动翼尖的变体飞行器。分布式无缝柔性舵面能够保持机翼表面连续光滑,改善机翼表面压强分布,从而提高气动效率、降低气动噪声。可动翼尖能够减轻机翼负荷,避免翼尖失速,改善飞行性能。本发明的变体飞行器根据采集到的环境数据,通过分布式无缝柔性舵面和可动翼尖实时改变机翼形状,大幅提高了飞行效率和环境适应能力。因此可以广泛应用于长航时滞空侦察、高强度物资运载、大面积大地测绘等不同领域。
2、根据本发明的一个方面,提供了一种基于分布式无缝柔性舵面和可动翼尖的变体飞行器,其特征在于包括:
3、机翼翼盒,柔性舵面,可动翼尖,尾翼,机身碳管,主起落架,机身,前起落架,动力装置。
4、所述机翼翼盒为“d”型空心截面梁,是机翼的主要承力部件,为机翼提供足够的抗弯和抗扭能力,同时还用于维持机翼前缘的形状和用于安装后缘的柔性舵面;
5、所述柔性舵面包括:
6、蒙皮滑槽,驱动电机,驱动连杆,柔性变弯机构,滑动蒙皮,固定蒙皮和蒙皮过渡段;
7、所述蒙皮滑槽位于机翼翼盒后部,机翼的上表面,用于限制滑动蒙皮的位移,使其只能够贴合机翼表面进行滑动;所述驱动电机用螺栓安装于机翼翼盒后部,机翼的内部,驱动电机的输出轴通过驱动连杆与柔性变弯机构连接,通过输出轴的转动带动柔性变弯机构的变形;所述驱动连杆两端分别用螺栓铰接于驱动电机的输出轴和柔性变弯机构的驱动位置处;所述柔性变弯机构位于机翼后缘,通过驱动电机的转动实现变形;所述滑动蒙皮粘贴于柔性变弯机构的上下表面,采用聚对苯二甲酸乙二醇酯薄膜,可以贴合柔性变弯机构进行变弯,维持机翼后缘的气动外形;所述固定蒙皮粘贴于蒙皮滑槽的上表面,采用聚对苯二甲酸乙二醇酯薄膜,但是不需要进行滑动,用于维持机翼中部上表面的气动外形;所述蒙皮过渡段位于相邻柔性舵面之间,粘贴于两侧柔性舵面的滑动蒙皮上,采用硅胶薄膜,具有良好的弹性,用于消除两侧柔性舵面在不同变弯幅度下产生的剪刀差,实现机翼后缘的整体无缝效果;
8、所述可动翼尖包括:
9、外侧翼段,根部连接件,编码器,无刷电机,减速器;
10、所述外侧翼段由碳纤维材料制作而成,通过第一耳片与减速器输出轴用螺栓连接,通过第二耳片与根部连接件用螺栓和轴承铰接;所述根部连接件安装在机翼外侧,用于连接外侧翼段,并安装编码器、无刷电机、减速器;所述编码器安装在根部连接件上,用于实现无刷电机的闭环控制;所述无刷电机安装在根部连接件上,用于提供外侧翼段转动的动力;所述减速器安装在根部连接件上,前端连接无刷电机,后端通过减速器输出轴连接外侧翼段的第一耳片,用于增大无刷电机的输出扭矩,驱动外侧翼段转动。
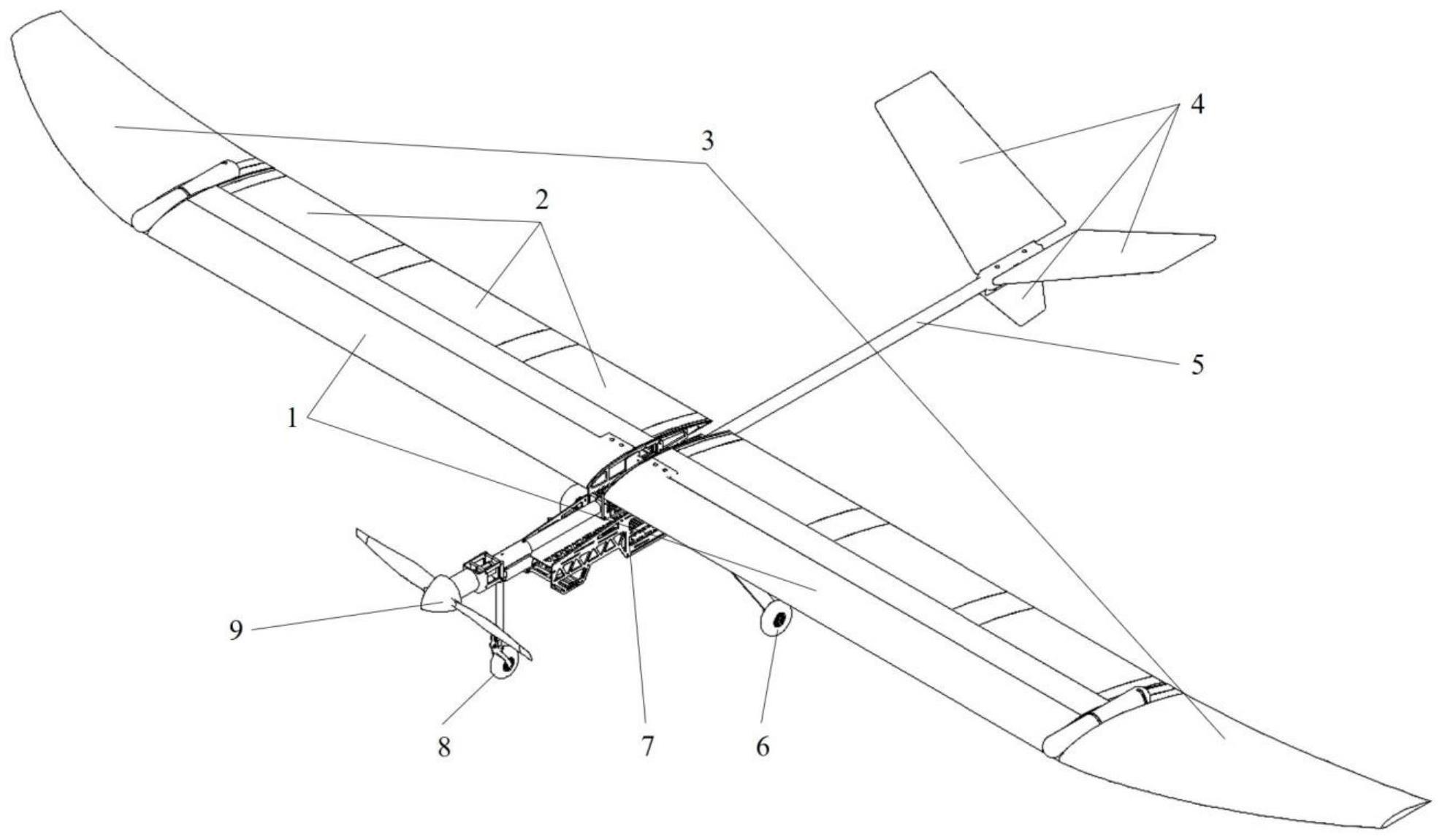
11、以所述机翼翼盒、所述柔性舵面、所述可动翼尖为主要结构组成的机翼安装在机身碳管的上方,为飞行器的飞行提供升力;机身安装在所述机身碳管的下方,内部用于布置飞控、电源和机载电脑等;动力装置和尾翼分别安装在所述机身碳管的前端和后端,所述动力装置用于提供飞行器的水平推力,所述尾翼用于提供配平力矩;前起落架安装在所述动力装置后部的机身碳管上,用于辅助支撑飞行器和地面转向;主起落架安装在所述机身的下部,用于支撑飞行器和承受起降时的主要载荷。
12、与现有飞行器相比,本发明的优点在于:
13、1、分布式无缝柔性舵面通过滑动蒙皮的方式实现了舵面连续变弯,通过蒙皮过渡段消除了舵面之间的剪刀差,实现了机翼表面的连续光滑和完全无缝,改善了机翼表面的压强分布,提高了气动效率。降低了气动噪声;
14、2、分布式无缝柔性舵面沿机翼后缘全展长分布,取代副翼、襟翼等结构,通过滚转和增升耦合操纵的方式同时实现了副翼和襟翼的功能,根据不同优化目标执行不同的弯度分布策略,结构简化,效率更高;
15、3、可动翼尖通过无刷电机磁场定向控制技术实现了翼尖按照指定的恢复力矩在某一角度的锁定或者按照指定的阻尼大小进行自由摆动的效果,从而实现了对机翼展弦比和翼根载荷的控制,使飞行器的设计能够同时兼顾飞行效率和结构可靠性的问题;
16、4、变体飞行器搭载了不同的传感器测量不同的物理量,比如通过陀螺仪测量姿态角、通过空速管测量来流速度、通过应变片测量翼根载荷,对这些数据进行实时分析并做出决策,通过分布式无缝柔性舵面和可动翼尖联合改变机翼形状,大幅提高了飞行器的飞行效率和环境适应能力。
17、附图说明
18、图1显示了根据本发明的一个实施例的基于分布式无缝柔性舵面和可动翼尖的变体飞行器总体设计方案;
19、图2显示了根据本发明的一个实施例的分布式无缝柔性舵面的具体结构;
20、图3显示了根据本发明的一个实施例的可动翼尖的具体结构。
技术特征:
1.一种基于分布式无缝柔性舵面和可动翼尖的变体飞行器,其特征在于包括:
2.根据权利要求1所述的一种基于分布式无缝柔性舵面和可动翼尖的变体飞行器,其特征在于:
3.根据权利要求1所述的一种基于分布式无缝柔性舵面和可动翼尖的变体飞行器,其特征在于:
技术总结
本发明公开了一种基于分布式无缝柔性舵面和可动翼尖的变体飞行器,包括机翼翼盒(1)、柔性舵面(2)、可动翼尖(3)、尾翼(4)、机身碳管(5)、主起落架(6)、机身(7)、前起落架(8)、动力装置(9);柔性舵面(2)由蒙皮滑槽(21)、驱动电机(22)、驱动连杆(23)、柔性变弯机构(24)、滑动蒙皮(25)、固定蒙皮(26)和蒙皮过渡段(27)组成,可以在飞行过程中连续光滑地变弯,提高机翼的升阻比,通过采用不同的变弯策略,可以实现针对机翼升力分布或者载荷分布的实时优化;可动翼尖(3)由外侧翼段(31)、根部连接件(32)、编码器(33)、无刷电机(34)、减速器(35)组成,既可以在飞行过程中锁定,增加机翼展弦比,也可以自由摆动,减轻机翼负荷和避免翼尖失速。
技术研发人员:戴玉婷,田博丞,陈东和,黄坤
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!