一种多模态跨域探测海空两栖无人机及探测方法
本发明属于无人机探测,具体涉及一种多模态跨域探测海空两栖无人机及探测方法。
背景技术:
1、为对海洋探测进行广覆盖、常态化、低成本的有效信息实时获取,亟需一种低成本、多用途的海空两栖无人机。目前无人机技术快速发展,应用中小型无人机进行大范围的海洋探测与监视具备了良好的平台技术基础,目前已有大量的海空两栖飞行器设计方案,但仍存在一些缺陷和不足。专利申请号为cn201811533728.5提出一种串列翼式水陆两栖飞机,该设计具有载重能力强和抗浪能力强的特点,但该设计不具备垂直起降能力,作业模态单一、未考虑多任务模式的需求。此外具备垂直起降能力的无人机在海面附近的抗风问题也是实践中亟需解决的问题。
技术实现思路
1、针对现有技术存在的缺陷,本发明提供一种多模态跨域探测海空两栖无人机及探测方法,可有效解决上述问题。
2、本发明采用的技术方案如下:
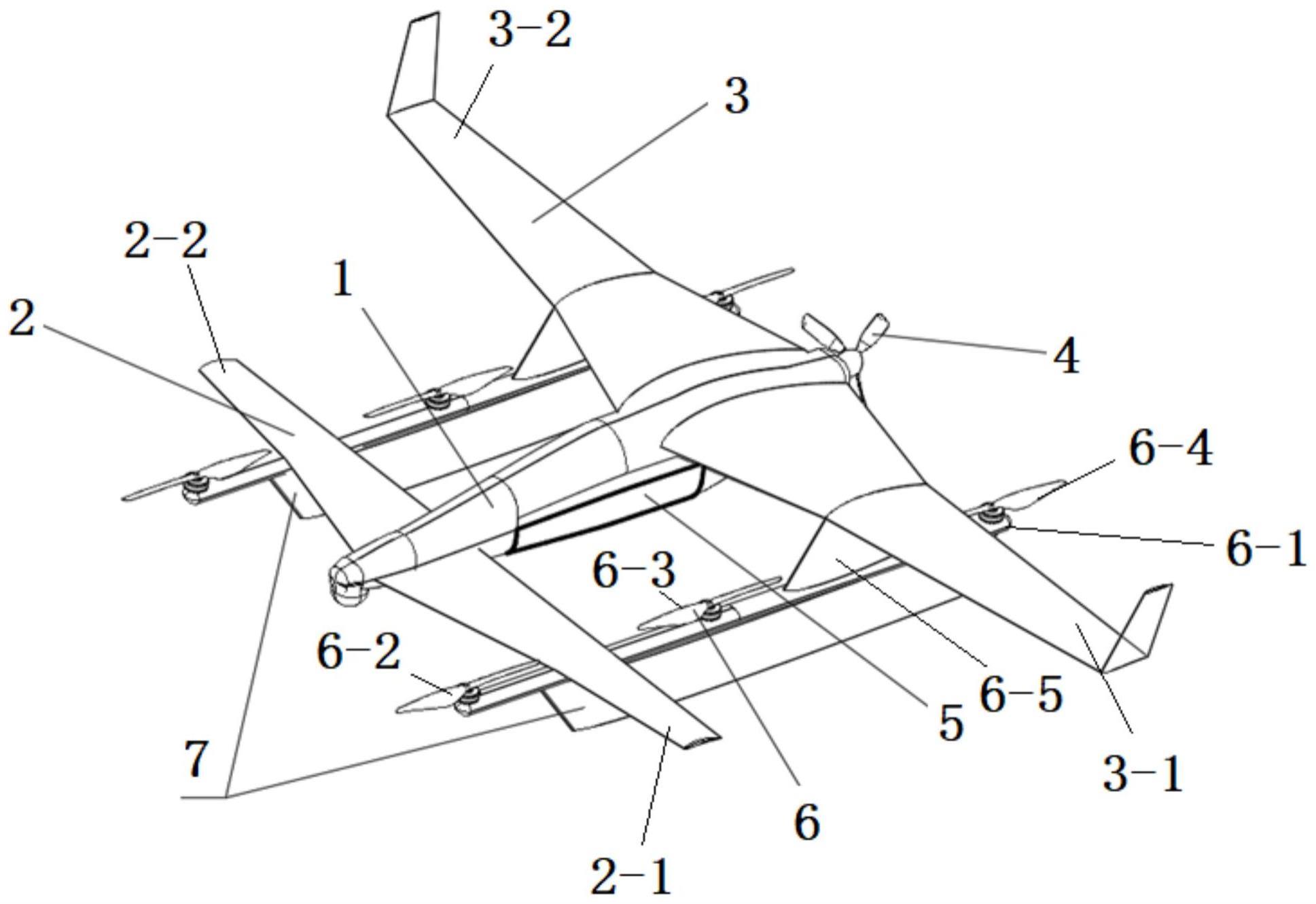
3、本发明提供一种多模态跨域探测海空两栖无人机,包括:机身(1)、前翼(2)、后翼(3)、推进旋翼(4)、模块化载荷仓(5)、起降旋翼组件(6)和可储水浮筒(7);
4、所述前翼(2)和所述后翼(3)分别设置于所述机身(1)的前部和后部,所述后翼(3)高于所述前翼(2),形成串列布置形式,用于提供水平飞行时的升力;其中,所述前翼(2)包括左右对称设置的左前翼(2-1)和右前翼(2-2);所述后翼(3)包括左右对称设置的左后翼(3-1)和右后翼(3-2);
5、所述推进旋翼(4)安装于所述机身(1)的尾部,用于提供水平飞行和水面航行时的推力;
6、所述模块化载荷仓(5)位于所述机身(1)的腹部中段;
7、所述起降旋翼组件(6)的设置数量为两个,左右对称设置于所述机身(1)的两侧,并位于所述前翼(2)和所述后翼(3)的下方,用于提供垂直起降阶段的拉力;
8、所述可储水浮筒(7)的设置数量为两个,左右对称设置于所述机身(1)的两侧,并位于所述起降旋翼组件(6)的下方,空置时用于提供整机水上漂泊作业的浮力,储水时用以提供使机体潜入水下的重力。
9、优选的,所述前翼(2)和所述后翼(3)的翼展比例为3:5,所述后翼(3)和所述前翼(2)的高度差h,为所述机身(1)的长度l的0.1~0.2倍。
10、优选的,对于左侧的所述起降旋翼组件(6),包括旋翼支撑杆(6-1)、第一旋翼(6-2)、第二旋翼(6-3)、第三旋翼(6-4)和垂直翼面(6-5);
11、所述旋翼支撑杆(6-1)沿与所述机身(1)中心线平行的方向设置,并位于所述左前翼(2-1)和所述左后翼(3-1)的下方;所述旋翼支撑杆(6-1)的前部顶面与所述左前翼(2-1)的底部搭接固定;所述旋翼支撑杆(6-1)的后部顶面和所述左后翼(3-1)的底部之间通过所述垂直翼面(6-5)连接固定,从而使所述左前翼(2-1)、所述左后翼(3-1)和所述旋翼支撑杆(6-1)之间连接形成整体;
12、所述旋翼支撑杆(6-1)的顶部,按从前向后方面,依次安装所述第一旋翼(6-2)、所述第二旋翼(6-3)和所述第三旋翼(6-4);其中,所述第一旋翼(6-2)位于所述左前翼(2-1)的前方,所述第二旋翼(6-3)位于所述左前翼(2-1)和所述左后翼(3-1)之间,所述第三旋翼(6-4)位于所述左后翼(3-1)的后方。
13、优选的,所述左前翼(2-1)和所述旋翼支撑杆(6-1)相接的位置,位于所述左前翼(2-1)0.4倍弦长位置;
14、所述左后翼(3-1)和所述旋翼支撑杆(6-1)相接的位置,位于所述左后翼(3-1)0.4倍弦长位置。
15、优选的,所述旋翼支撑杆(6-1)的长度,为所述机身(1)长度的1~1.2倍。
16、优选的,所述旋翼支撑杆(6-1)的下方,固定安装所述可储水浮筒(7);所述可储水浮筒(7)的高度,不低于所述机身(1)的高度;所述可储水浮筒(7)设置有水泵,实现所述可储水浮筒(7)的吸水和排水功能,实现下潜状态和水面漂浮的转换。
17、优选的,所述模块化载荷仓(5)根据任务需要搭载光学、温/湿度、盐度、声呐传感器,用于执行灾害评估、水文监测、水下生物探测保护任务。
18、本发明还提供一种多模态跨域探测海空两栖无人机的探测方法,包括以下步骤:
19、步骤1,母船搭载多模态跨域探测海空两栖无人机航行至作业水域周围;
20、步骤2,在母船甲板上启动多模态跨域探测海空两栖无人机的起降旋翼组件(6),使多模态跨域探测海空两栖无人机进行垂直起飞,到达指定高度后,启动推进旋翼(4),在水平速度达到设计转换速度后关闭起降旋翼组件(6),转换至水平巡航飞行状态;
21、在水平巡航飞行过程中,使用搭载于模块化载荷仓(5)的各类载荷对目标水域进行临空探测,根据需要可随时再启动所述起降旋翼组件(6)并关闭所述推进旋翼(4),使多模态跨域探测海空两栖无人机在水面进行降落和停泊,打开推进旋翼(4)进行水面航行作业;
22、根据任务需要,打开可储水浮筒(7)的水泵吸水或排水,当排水时,进行上浮动作;当吸水时,进行下潜动作,对水下目标进行长时间、近距离探测;
23、步骤3,本地探测完成后,再次起飞并降落至下一目标区域进行探测,作业结束后,自主返航或在水面栖停等待母船回收。
24、本发明提供的一种多模态跨域探测海空两栖无人机及探测方法具有以下优点:
25、本发明采取的技术方案具有多飞行模态、跨域探测、抗风/浪能力强、储运要求低、可实现迁徙式探测、应用前景广泛等优势,能够满足低成本、无人化、广覆盖的大范围水面、水下信息获取的实际需求。
技术特征:
1.一种多模态跨域探测海空两栖无人机,其特征在于,包括:机身(1)、前翼(2)、后翼(3)、推进旋翼(4)、模块化载荷仓(5)、起降旋翼组件(6)和可储水浮筒(7);
2.根据权利要求1所述的一种多模态跨域探测海空两栖无人机,其特征在于,所述前翼(2)和所述后翼(3)的翼展比例为3:5,所述后翼(3)和所述前翼(2)的高度差h,为所述机身(1)的长度l的0.1~0.2倍。
3.根据权利要求1所述的一种多模态跨域探测海空两栖无人机,其特征在于,对于左侧的所述起降旋翼组件(6),包括旋翼支撑杆(6-1)、第一旋翼(6-2)、第二旋翼(6-3)、第三旋翼(6-4)和垂直翼面(6-5);
4.根据权利要求3所述的一种多模态跨域探测海空两栖无人机,其特征在于,所述左前翼(2-1)和所述旋翼支撑杆(6-1)相接的位置,位于所述左前翼(2-1)0.4倍弦长位置;
5.根据权利要求3所述的一种多模态跨域探测海空两栖无人机,其特征在于,所述旋翼支撑杆(6-1)的长度,为所述机身(1)长度的1~1.2倍。
6.根据权利要求3所述的一种多模态跨域探测海空两栖无人机,其特征在于,所述旋翼支撑杆(6-1)的下方,固定安装所述可储水浮筒(7);所述可储水浮筒(7)的高度,不低于所述机身(1)的高度;所述可储水浮筒(7)设置有水泵,实现所述可储水浮筒(7)的吸水和排水功能,实现下潜状态和水面漂浮的转换。
7.根据权利要求1所述的一种多模态跨域探测海空两栖无人机,其特征在于,所述模块化载荷仓(5)根据任务需要搭载光学、温/湿度、盐度、声呐传感器,用于执行灾害评估、水文监测、水下生物探测保护任务。
8.一种权利要求1-7任一项所述的多模态跨域探测海空两栖无人机的探测方法,其特征在于,包括以下步骤:
技术总结
本发明提供一种多模态跨域探测海空两栖无人机及探测方法,多模态跨域探测海空两栖无人机,包括:机身、前翼、后翼、推进旋翼、模块化载荷仓、起降旋翼组件和可储水浮筒;所述可储水浮筒的设置数量为两个,左右对称设置于所述机身的两侧,并位于所述起降旋翼组件的下方,空置时用于提供整机水上漂泊作业的浮力,储水时用以提供使机体潜入水下的重力。本发明采取的技术方案具有多飞行模态、跨域探测、抗风/浪能力强、储运要求低、可实现迁徙式探测、应用前景广泛等优势,能够满足低成本、无人化、广覆盖的大范围水面、水下信息获取的实际需求。
技术研发人员:王琛,张航,钟京洋
受保护的技术使用者:长安大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!