一种光电系统高稳定精度的两轴三框机构的制作方法
本发明属于机载光电系统结构设计领域,具体涉及一种光电系统高稳定精度的两轴三框机构。
背景技术:
1、机载光电系统由于其重量轻、操作灵活、稳定性好等优点,目前被广泛应用于军事和民用领域中,其结构形式直接影响了光电系统的整体设计、承载能力和稳定精度等。对于直升机、固定翼无人机来说,飞机的姿态运动主要在航向、俯仰方向,因此常采用两轴两框、两轴四框等结构形式。
2、两轴两框构型具有体积小、重量轻的优势,采用整体稳定的方式,一般在光电系统安装面设置减振器,当载机在水平方向上振动时,由于其悬臂形式的结构,容易引起振动耦合,导致该构型的稳定精度不高,此外,该构型无法实现过顶跟踪,故俯仰旋转角度受到限制。
3、两轴四框构型具有能满足高性能稳定要求的双倍框数,内框架处在外框架的保护中,因此不受环境影响且可实现精密轴系设计,内框与外框之前通常设计减振器,且减振器布局中心与质心重合,可实现振动解耦,故具有较高的稳定精度,但其结构复杂,且由于其内、外俯仰轴系的存在,使得光学传感器的有效宽度空间减小,不利于小型化的要求。
技术实现思路
1、要解决的技术问题:
2、为了避免现有技术的不足之处,本发明提供一种光电系统高稳定精度的两轴三框机构,包括方位轴和俯仰轴两个相互独立且正交的回转轴,包含外方位框、内俯仰框、内方位框三个框架。在外方位框与内俯仰框之间设计有减振器,减振器布局的几何中心与被减振的内框架的质心重合。在内方位框上设计有陀螺,能够敏感内俯仰轴、内方位轴的旋转角加速度。本发明综合了实现光电系统小型化、轻量化,避免过顶跟踪的限制,可以实现振动解耦,使光电系统具有较高的稳定精度。
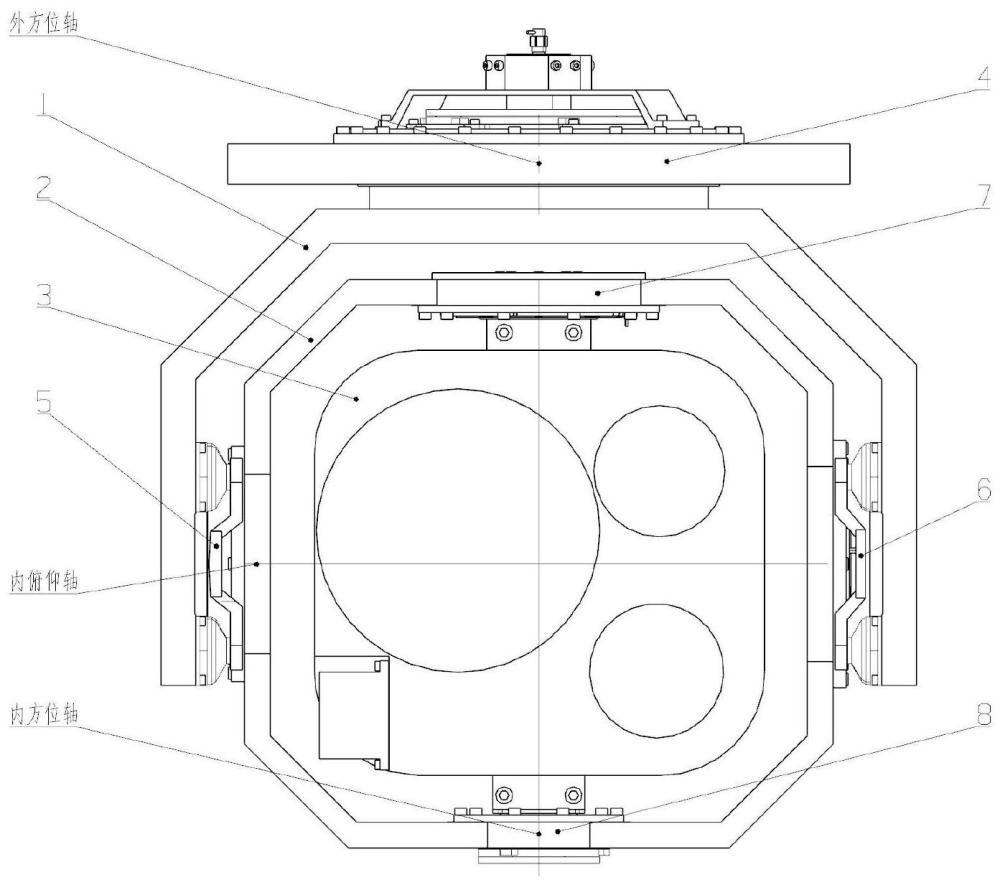
3、本发明的技术方案是:一种光电系统高稳定精度的两轴三框机构,包括相互正交的方位回转轴系和俯仰回转轴系、及用于搭载回转轴系的三个框架;
4、所述方位回转轴系分为外方位轴系和内方位轴系;
5、三个框架从外到内依次为外方位框、内俯仰框、内方位框;
6、所述外方位轴系设置于外方位框的方位回转轴上,俯仰回转轴系设置于外方位框和内俯仰框之间、并位于内俯仰框的俯仰回转轴上,内方位轴系设置于内俯仰框和内方位框之间、并位于内方位框的方位回转轴上。
7、本发明的进一步技术方案是:所述外方位轴系的转轴一端通过外方位轴承与定轴转动连接,另一端与外方位框连接,通过驱动部件驱动转轴转动,进而带动外方位框转动;并由安装于转轴上的编码器记录外方位框旋转位置。
8、本发明的进一步技术方案是:所述外方位轴系的驱动部件为力矩电机或由伺服电机控制齿轮减速传动的机构;且外方位轴系中设计有导电滑环,能够通过驱动实现外方位轴系360°连续旋转。
9、本发明的进一步技术方案是:所述俯仰回转轴系包括对称设置于内俯仰框两侧的第一内俯仰轴系和第二内俯仰轴系;所述第一内俯仰轴系为随动端,其定轴安装于外方位框上,转轴的一端通过第一内俯仰轴承转动连接于其定轴上,另一端安装于内俯仰框上;所述第二内俯仰轴系为驱动端,其定轴安装于外方位框上,转轴的一端通过第二内俯仰轴承转动连接于其定轴上,另一端安装于内俯仰框上;
10、所述第二内俯仰轴系的转轴通过力矩电机驱动旋转,第一俯仰轴系的转轴上安装有编码器,用于记录内俯仰框的旋转位置。
11、本发明的进一步技术方案是:所述内俯仰轴系设置有机械限位结构,限制内俯仰框的旋转范围为-120°至30°。
12、本发明的进一步技术方案是:所述内方位轴系包括对称设置于内方位框两侧的第一内方位轴系和第二内方位轴系;所述第一内方位轴系为驱动端,其定轴安装于外内俯仰框,转轴的一端通过第一内方位轴承转动连接于其定轴上,另一端安装于内方位框上;所述第二内方位轴系为随动端,其定轴安装于外内俯仰框,转轴的一端通过第而内方位轴承转动连接于其定轴上,另一端安装于内方位框上;
13、所述第一内方位轴系的转轴通过力矩电机驱动旋转,第二内方位轴系的转轴上安装有编码器,用于记录内方位框的旋转位置。
14、本发明的进一步技术方案是:所述内方位轴系设置有机械限位结构,限制内方位框的旋转范围为-3°至3°。
15、本发明的进一步技术方案是:还包括减振组件,所述减振组件包括对称设置于内俯仰框两侧的减振器,所述减振器一端固定在外方位框上,一端固定在内俯仰轴系的减振器连接板上。
16、本发明的进一步技术方案是:所述减振器连接板套装于内俯仰轴系上,其上沿周向均布4个减振器,减振器布局的几何中心与被减振的内框架的质心重合。
17、本发明的进一步技术方案是:所述内方位框上安装有陀螺,陀螺的两个敏感轴分别于内方位轴、内俯仰轴平行,能够敏感内俯仰轴、内方位轴的旋转角加速度。
18、有益效果
19、本发明的有益效果在于:
20、本发明一种光电系统高稳定精度的两轴三框构型,相较于两轴两框构型增加了内方位框和内方位轴系,避免了过顶跟踪的问题,可以实现俯仰大角度的转动。
21、本发明涉及的两轴三框构型,相较于两轴四框构型减少了外俯仰轴系,降低了结构的复杂程度,在光学传感器的有效宽度空间一致的情况下,可减小外框的回转范围,有利于实现小型化。
22、本发明涉及的两轴三框构型,在内框架外设计了减振环节,减振器布局的几何中心与被减振的内框架的质心重合,可实现振动解耦,有利于提升稳定精度。
23、本发明涉及的两轴三框构型,在内方位框上安装有陀螺,能够敏感内俯仰轴、内方位轴的旋转角加速度,且随着内框架的转动,陀螺敏感轴与内俯仰、内方位执行轴的相对位置关系不会改变,因此可以实现内框架的高稳定精度控制。
技术特征:
1.一种光电系统高稳定精度的两轴三框机构,其特征在于:包括相互正交的方位回转轴系和俯仰回转轴系、及用于搭载回转轴系的三个框架;
2.根据权利要求1所述一种光电系统高稳定精度的两轴三框机构,其特征在于:所述外方位轴系的转轴一端通过外方位轴承与定轴转动连接,另一端与外方位框连接,通过驱动部件驱动转轴转动,进而带动外方位框转动;并由安装于转轴上的编码器记录外方位框旋转位置。
3.根据权利要求2所述一种光电系统高稳定精度的两轴三框机构,其特征在于:所述外方位轴系的驱动部件为力矩电机或由伺服电机控制齿轮减速传动的机构;且外方位轴系中设计有导电滑环,能够通过驱动实现外方位轴系360°连续旋转。
4.根据权利要求1所述一种光电系统高稳定精度的两轴三框机构,其特征在于:所述俯仰回转轴系包括对称设置于内俯仰框两侧的第一内俯仰轴系和第二内俯仰轴系;所述第一内俯仰轴系为随动端,其定轴安装于外方位框上,转轴的一端通过第一内俯仰轴承转动连接于其定轴上,另一端安装于内俯仰框上;所述第二内俯仰轴系为驱动端,其定轴安装于外方位框上,转轴的一端通过第二内俯仰轴承转动连接于其定轴上,另一端安装于内俯仰框上;
5.根据权利要求4所述一种光电系统高稳定精度的两轴三框机构,其特征在于:所述内俯仰轴系设置有机械限位结构,限制内俯仰框的旋转范围为-120°至30°。
6.根据权利要求1所述一种光电系统高稳定精度的两轴三框机构,其特征在于:所述内方位轴系包括对称设置于内方位框两侧的第一内方位轴系和第二内方位轴系;所述第一内方位轴系为驱动端,其定轴安装于外内俯仰框,转轴的一端通过第一内方位轴承转动连接于其定轴上,另一端安装于内方位框上;所述第二内方位轴系为随动端,其定轴安装于外内俯仰框,转轴的一端通过第而内方位轴承转动连接于其定轴上,另一端安装于内方位框上;
7.根据权利要求6所述一种光电系统高稳定精度的两轴三框机构,其特征在于:所述内方位轴系设置有机械限位结构,限制内方位框的旋转范围为-3°至3°。
8.根据权利要求1-7任一项所述一种光电系统高稳定精度的两轴三框机构,其特征在于:还包括减振组件,所述减振组件包括对称设置于内俯仰框两侧的减振器,所述减振器一端固定在外方位框上,一端固定在内俯仰轴系的减振器连接板上。
9.根据权利要求8所述一种光电系统高稳定精度的两轴三框机构,其特征在于:所述减振器连接板套装于内俯仰轴系上,其上沿周向均布4个减振器,减振器布局的几何中心与被减振的内框架的质心重合。
10.根据权利要求1所述一种光电系统高稳定精度的两轴三框机构,其特征在于:所述内方位框上安装有陀螺,陀螺的两个敏感轴分别于内方位轴、内俯仰轴平行,能够敏感内俯仰轴、内方位轴的旋转角加速度。
技术总结
本发明一种光电系统高稳定精度的两轴三框机构,属于机载光电系统结构设计领域;包括相互正交的方位回转轴系和俯仰回转轴系、及用于搭载回转轴系的三个框架;所述方位回转轴系分为外方位轴系和内方位轴系;三个框架从外到内依次为外方位框、内俯仰框、内方位框;所述外方位轴系设置于外方位框的方位回转轴上,俯仰回转轴系设置于外方位框和内俯仰框之间、并位于内俯仰框的俯仰回转轴上,内方位轴系设置于内俯仰框和内方位框之间、并位于内方位框的方位回转轴上。本发明综合了实现光电系统小型化、轻量化,避免过顶跟踪的限制,可以实现振动解耦,使光电系统具有较高的稳定精度。
技术研发人员:张孝南,张双权,刘先胜
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!