一种基于HUD及机器视觉的飞机泊位引导系统及方法与流程
本申请属于机器视觉、hud技术及飞机场面引导,具体涉及一种基于hud及机器视觉的飞机泊位引导系统及方法。
背景技术:
1、飞机着陆后到滑行道停机位的过程中,需要依靠地面引导车、地面指挥人员指挥飞机,引导飞机滑行到停机位。这个过程将消耗较多的人力物力,且当遇到恶劣天气的时候可能带来较大的困难(例如严寒、酷暑、大雨等天气条件给地面指挥人员带来较大的工作负担)。如今虽然已经有了安装在机场停机位区域的泊机引导终端,但是安装使用的费用较高且需要人员进行操作。目前,尚未出现基于hud及机器视觉技术的飞机泊位引导系统及引导方法。
技术实现思路
1、为了解决上述问题,本申请的目的在于提供一种基于hud及机器视觉技术的飞机泊位引导系统及引导方法,在hud原有的功能上新增机器视觉技术,获得机场滑行道及停机位相关特征信息并经过计算处理后显示给飞行员,支持飞行员在飞机着陆后在h-vdgs的辅助下实现精准停机。
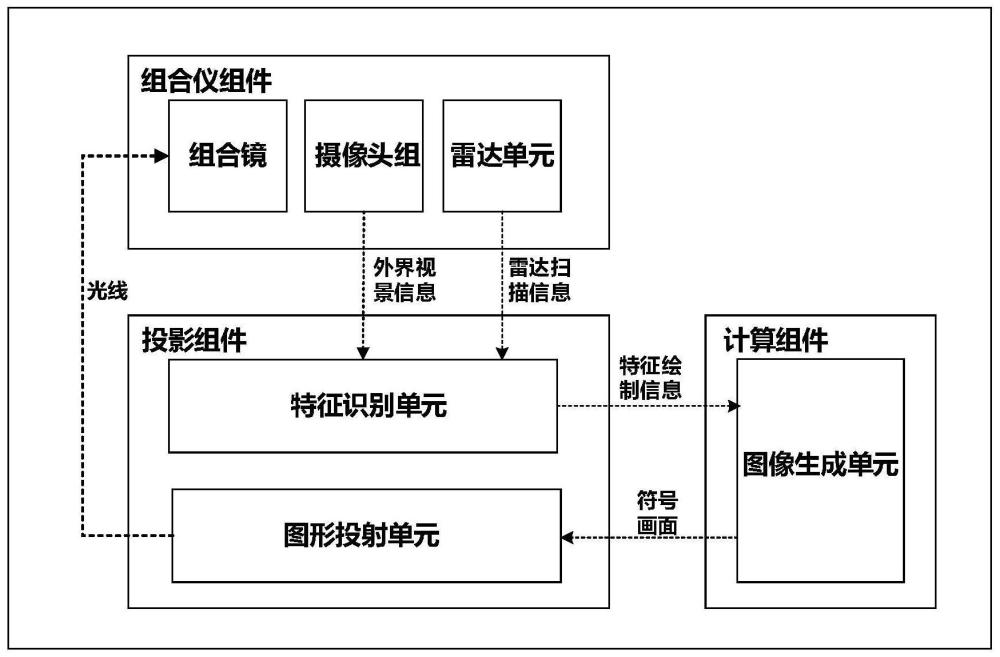
2、为了达到上述目的,本申请提供了一种基于hud及机器视觉的飞机泊位引导系统,所述引导系统包括hud组合仪组件、hud投影组件及计算组件,其中,
3、所述hud组合仪组件用于探测外部视景信息和障碍物信息并将所述外部视景信息和所述障碍物信息发送给hud投影组件,所述hud组合仪组件包括多个用于拍摄飞机前方外部视景信息的摄像头、用于探测前方障碍物信息的雷达以及组合镜;
4、所述hud投影组件用于通过接收到的所述外部视景信息和所述障碍物信息计算得出距离目标泊位的距离及方位偏差,并将所述目标泊位的距离及方位偏差投射至所述hud组合仪组件;
5、所述计算组件用于接收所述距离目标泊位的距离及方位偏差并将其绘制成引导画面反馈至所述hud投影组件,所述hud投影组件将所述引导画面投射至所述hud组合仪组件;
6、所述组合镜用于显示所述引导画面。
7、本申请所提供的基于hud及机器视觉技术的飞机泊位引导系统,还具有这样的特征,多个摄像头的焦距不同、安装角度不同。
8、本申请所提供的基于hud及机器视觉技术的飞机泊位引导系统,还具有这样的特征,所述hud投影组件包括特征识别单元和图像投射单元,
9、所述特征识别单元使用融合特征识别算法通过障碍物信息和外部视景信息探测出飞机外部的飞机泊位地面标识及飞机泊位标牌,进而计算得出距离目标泊位的距离及方位偏差;
10、所述图像投射单元用于接收所述计算组件的引导画面并将引导画面投射至所述hud组合仪组件。
11、本申请所提供的基于hud及机器视觉技术的飞机泊位引导系统,还具有这样的特征,所述计算组件包括图像生成单元,用于将距离目标泊位的距离和方位偏差绘制成引导画面。
12、本申请所提供的基于hud及机器视觉技术的飞机泊位引导系统,还具有这样的特征,所述引导画面包括:
13、场面引导符号,用于向显示滑行道引导信息;
14、目标探测符号,用于提示目标机位未被识别;
15、机位识别符号,用于提示目标机位已被识别;
16、方位引导符号,用于提示修正飞机的方位;
17、距离引导符号,用于提示调整飞机的地速;
18、泊机到位符号,用于提示已准确泊机。
19、本申请所提供的基于hud及机器视觉技术的飞机泊位引导系统,还具有这样的特征,多个摄像头包括设置在机外用于识别飞机滑行位置影像的舱外监视摄像头,多个舱外监视摄像头获取的图像信息融合后获得泊机滑行影像,所述泊机滑行影像在所述引导画面中显示。
20、本申请所提供的基于hud及机器视觉技术的飞机泊位引导系统,还具有这样的特征,多个舱外监视摄像头不少于三个,分别安装在主起落架区域、前起落架区域和apu装置区域。
21、本申请所提供的基于hud及机器视觉技术的飞机泊位引导系统,还具有这样的特征,所述hud组合仪组件还包括舱内语音识别设备,所述舱内语音识别设备用于识别舱内语音信息,并将舱内语音信息指示的泊机信息传递给所述计算组件后绘制在所述引导画面中。
22、本申请的另一目的在于,提供一种基于hud及机器视觉技术的飞机泊位引导方法,所述方法使用如前述任一项所述引导系统,包括如下步骤:
23、s1:飞机落地且稳定滑行后,hud自动切换到场面引导工作模式;
24、s2:引导系统上的hud组合仪组件探测飞机前方的滑行道、跑道灯及道面标牌等信息的特征;
25、s3:h-vdgs中的特征识别单元根据探测到的特征计算出滑行道区域的滑行道中线、滑行道边灯、道面标牌的位置特征。
26、s4:h-vdgs根据获取的滑行道中线、滑行道边灯、道面标牌等信息,绘制引导画面显示给飞行员,飞行员进行滑行相关操作。
27、s5:飞机滑行道临近泊机区域附近后,飞行员主动将hud切换到泊机引导工作模式。
28、s6:h-vdgs上的摄像头组合雷达探测飞机前方的停机位标识、停机位标牌信息的特征。
29、s7:h-vdgs中的特征识别单元根据探测到的特征计算出距离停机位理想位置的方位偏差、距离偏差等。
30、s8:h-vdgs根据获取的方位偏差、距离偏差等信息,绘制引导画面显示给飞行员,飞行员观察后进而根据偏差信息操纵飞机移动,使得飞机精准的停泊到目标停机位上,此时hud上显示泊机到位符号,提示飞行员已经准确泊机。
31、有益效果
32、本发明提出了一种基于hud及机器视觉技术的飞机泊位引导系统及引导方法,能够辅助飞行员实现飞机在滑行道的滑行操作,及实现精准泊机,且能够应对复杂天气情况(大雨、大雪、大雾、沙尘等),提高了泊机效率,可增强、优化或替代地面飞机引导员、地面引导车及机场的自动泊机设备的工作内容,且使用该套系统所需的额外费用较低。
33、有益效果如下:
34、(1)采用本发明介绍的系统及方法能够辅助飞行员实现飞机在滑行道的滑行操作,降低了引导车的工作负担,或可替代引导车的该部分工作内容,具有显著降本增效的应用效益。
35、(2)采用本发明介绍的系统及方法,能够辅助飞行员实现精准机位泊机,降低了飞机地面引导员的工作负担,或可替代飞机地面引导员的该部分工作内容,具有显著降本增效的应用效益。
36、(3)采用本发明介绍的系统及方法,不更改机场设施,不更改飞机上除hud之外的其他系统或设备,不更改本体飞机结构,且在hud上选取的安装位置十分适合执行机器视觉任务,改动工作引起的改动成本很低,具有显著降本增效的应用效益。
技术特征:
1.一种基于hud及机器视觉的飞机泊位引导系统,其特征在于,所述引导系统包括hud组合仪组件、hud投影组件及计算组件,其中,
2.根据权利要求1所述的基于hud及机器视觉技术的飞机泊位引导系统,其特征在于,多个摄像头的焦距不同、安装角度不同。
3.根据权利要求1所述的基于hud及机器视觉技术的飞机泊位引导系统,其特征在于,所述hud投影组件包括特征识别单元和图像投射单元,
4.根据权利要求1所述的基于hud及机器视觉技术的飞机泊位引导系统,其特征在于,所述计算组件包括图像生成单元,用于将距离目标泊位的距离和方位偏差绘制成引导画面。
5.根据权利要求1所述的基于hud及机器视觉技术的飞机泊位引导系统,其特征在于,所述引导画面包括:
6.根据权利要求1所述的基于hud及机器视觉技术的飞机泊位引导系统,其特征在于,多个摄像头包括设置在机外用于识别飞机滑行位置影像的舱外监视摄像头,多个舱外监视摄像头获取的图像信息融合后获得泊机滑行影像,所述泊机滑行影像在所述引导画面中显示。
7.根据权利要求6所述的基于hud及机器视觉技术的飞机泊位引导系统,其特征在于,多个舱外监视摄像头不少于三个,分别安装在主起落架区域、前起落架区域和apu装置区域。
8.根据权利要求1所述的基于hud及机器视觉技术的飞机泊位引导系统,其特征在于,所述hud组合仪组件还包括舱内语音识别设备,所述舱内语音识别设备用于识别舱内语音信息,并将舱内语音信息指示的泊机信息传递给所述计算组件后绘制在所述引导画面中。
9.一种基于hud及机器视觉技术的飞机泊位引导方法,其特征在于,所述方法使用如权利要求1-8任一项所述引导系统,包括如下步骤:
技术总结
本申请提供了一种基于HUD及机器视觉技术的飞机泊位引导系统及引导方法,属于机器视觉、HUD技术及飞机场面引导领域,包括HUD组合仪组件、HUD投影及计算组件,其中组合仪上安装有多个摄像头和雷达,组合仪将探测到的外部信息发送给HUD投影及计算组件,HUD投影及计算组件根据特征计算得出距离目标泊位的距离及方位偏差投射到HUD组合仪组件的组合镜上。采用该系统及方法能够辅助飞行员实现飞机在滑行道的滑行操作,及实现飞机的精准泊机,且能够应对复杂天气情况,提高了泊机效率,可增强、优化或替代飞机引导员、地面引导车及机场的自动泊机设备的工作内容,且使用该套系统所需的额外费用较低,具有显著降本增效的应用效益。
技术研发人员:王鹏程,杨世保,陈俊辉
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!