一种集装箱式eVTOL旋翼飞行器及eVTOL旋翼飞行器集群的制作方法
本发明涉及但不限于飞行器,尤指一种集装箱式evtol旋翼飞行器及evtol旋翼飞行器集群。
背景技术:
1、目前,城市交通拥堵问题日益严重,随着航空电机、电池、电传飞控、复合材料等关键技术的快速发展,evtol飞行器(电动垂直起降飞行器)应运而生,已成为航空界新兴领域,并推动航空业向零排放绿色发展。evtol飞行器是指以电力作为飞行动力来源同时具备垂直起降功能飞行器,具有垂直起降、智能操作、快捷机动、低成本、低噪声、零排放、易维护、高安全等特点,相对传统飞行器,具有安全性、智能性、经济性和环保性优势显著,可应用于载人客运、载物货运、低空旅游、城市管理、警务安防、国防军事、应急救援、个人或家庭出行等众多领域。以大疆无人机、小鹏汇天、鸿鹄evtol、volocopter和vahana等为典型,各类evtol飞行器,层出不穷,将对未来社会、经济、安全和环境等方面产生重大影响,带来巨大价值。
2、然而,现有的evtol飞行器主要采用倾转旋翼、倾转机翼、倾转涵道构型,或采用多旋翼构型形式实现垂直起飞到前飞的过渡转换,上述构型的evtol飞行器实施过渡转换的技术难度较高,过渡转换过程中存在安全隐患。
技术实现思路
1、本发明的目的:为了解决上述问题,本发明实施例提供一种集装箱式evtol旋翼飞行器及evtol旋翼飞行器集群,以解决现有构型的evtol飞行器实施过渡转换的技术难度较高,且过渡转换过程中存在安全隐患的问题。
2、本发明的技术方案:本发明实施例提供一种多桨倾转机翼构型飞行器的机翼倾转装置,包括:旋翼系统和货舱系统;
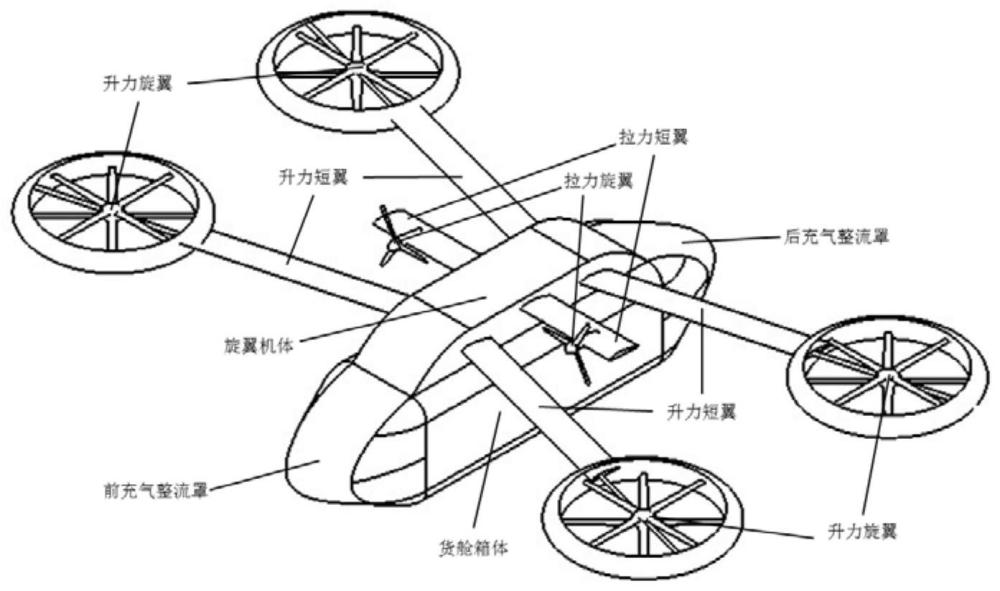
3、其中,所述旋翼系统包括:旋翼机体、升力旋翼、升力短翼、拉力旋翼、拉力短翼;沿所述旋翼机体的航向对称设置有至少2个升力短翼,每个升力短翼的端部通过支撑杆连接1个升力旋翼,使得升力旋翼沿旋翼机体的航向对称分布;沿所述旋翼机体的航向对称设置有至少2个拉力短翼,每个拉力短翼的前缘或后缘设置有拉力旋翼;
4、所述旋翼系统,用于在前飞过程中由升力短翼、升力旋翼和拉力短翼共同向evtol旋翼飞行器提供升力,由拉力旋翼提供拉力;还用于在垂直起降过程中由升力旋翼向evtol旋翼飞行器提供升力;
5、所述货舱系统连接于旋翼机体的底部,用于通过旋翼系统执行空中运输,并且在达目的地后与旋翼机体分离。
6、可选地,如上所述的集装箱式evtol旋翼飞行器中,
7、所述货舱系统包括连接于旋翼机体底部的货舱箱体,以及设置于货舱箱体前、后两端的前、后充气整流罩,用于前飞过程中通过整流降低空气阻力;
8、其中,前、后充气整流罩具有充气功能和放气功能,用于前飞过程中通过充气实现整流以降低空气阻力,在地面运输过程中通过放气实现折叠收纳。
9、可选地,如上所述的集装箱式evtol旋翼飞行器中,
10、所述升力短翼与升力旋翼为一一对称设置,沿旋翼机体的航向对称设有4个。
11、可选地,如上所述的集装箱式evtol旋翼飞行器中,
12、每个升力旋翼包括上旋翼和下旋翼,每个升力旋翼的外周设置有旋翼整流罩,且旋翼整流罩与对应位置的升力短翼端部连接;
13、所述升力旋翼采用同轴同转形式,4个升力旋翼的旋转方式设置为对角相反。
14、可选地,如上所述的集装箱式evtol旋翼飞行器中,
15、所述旋翼机体的尺寸设置为:长2r~5r,宽0.5r~2r,高0.25r~1r;
16、每个升力短翼的展长3r~5r,弦长0.5r~2r,攻角0~10°,每个升力短翼端部伸出支撑杆的长度为2r,以支撑相应升力旋翼;位于旋翼机体前侧的2个升力短翼的前略角0~20°,位于旋翼机体后侧的2个升力短翼的后略角0~20°;
17、其中,r为升力旋翼的半径。
18、可选地,如上所述的集装箱式evtol旋翼飞行器中,
19、所述拉力旋翼的桨叶片数选用2片到8片,旋翼半径0.5r~2r(0.5r),沿机体航向对称布置,用于提供前飞拉力以克服前飞阻力,使飞行器具备高速飞行能力。
20、可选地,如上所述的集装箱式evtol旋翼飞行器中,
21、所述拉力短翼的展长2r~3r,弦长0.5r~1r,攻角0~10°,作为相应位置拉力旋翼的支撑结构。
22、可选地,如上所述的集装箱式evtol旋翼飞行器中,
23、所述拉力短翼沿旋翼机体的航向对称设有2个,2个拉力短翼的前缘或后缘对称设置有2个或4个拉力旋翼。
24、可选地,如上所述的集装箱式evtol旋翼飞行器中,
25、所述拉力短翼沿旋翼机体的航向对称设有4个,4个拉力短翼的前缘或后缘对称设置有4个拉力旋翼。
26、可选地,如上所述的集装箱式evtol旋翼飞行器中,
27、所述拉力短翼沿旋翼机体的航向对称设有6个,6个拉力短翼的前缘或后缘对称设置有6个拉力旋翼。
28、本发明实施例还提供一种evtol旋翼飞行器集群,其特征在于,包括如权利要求1~5中任一项所述的集装箱式evtol旋翼飞行器;
29、所述evtol旋翼飞行器集群中,部分evtol旋翼飞行器的拉力短翼沿旋翼机体的航向对称设有2个,2个拉力短翼的前缘或后缘对称设置有2个或4个拉力旋翼;
30、部分evtol旋翼飞行器的拉力短翼沿旋翼机体的航向对称设有4个,4个拉力短翼的前缘或后缘对称设置有4个拉力旋翼;
31、部分evtol旋翼飞行器的拉力短翼沿旋翼机体的航向对称设有6个,6个拉力短翼的前缘或后缘对称设置有6个拉力旋翼。
32、本发明的有益效果:本发明实施例提供一种集装箱式evtol旋翼飞行器及evtol旋翼飞行器集群,升力旋翼和拉力旋翼分离,且旋翼系统和货舱系统采用分离结构,能使用集中箱运输卡车方式进行空中运输,具有安全性高、灵活、旋翼利用率高等优点的evtol旋翼飞行器。本发明实施例中的evtol旋翼飞行器,将升力旋翼和拉力旋翼分离,安全性更高,且旋翼系统与货舱系统分离,可按集中箱运输卡车方式进行空中运输,具有灵活、旋翼利用率高等优点。以距离200km两城市间进行货运为应用场景,采用本发明实施例提供的evtol旋翼飞行器,能实现1小时两地城市间通勤。
技术特征:
1.一种集装箱式evtol旋翼飞行器,其特征在于,包括:旋翼系统和货舱系统;
2.根据权利要求1所述的集装箱式evtol旋翼飞行器,其特征在于,
3.根据权利要求1所述的集装箱式evtol旋翼飞行器,其特征在于,
4.根据权利要求3所述的集装箱式evtol旋翼飞行器,其特征在于,
5.根据权利要求1~4中任一项所述的集装箱式evtol旋翼飞行器,其特征在于,
6.根据权利要求5所述的集装箱式evtol旋翼飞行器,其特征在于,
7.根据权利要求5所述的集装箱式evtol旋翼飞行器,其特征在于,
8.根据权利要求5所述的集装箱式evtol旋翼飞行器,其特征在于,
9.根据权利要求5所述的集装箱式evtol旋翼飞行器,其特征在于,
10.一种evtol旋翼飞行器集群,其特征在于,包括如权利要求1~9中任一项所述的集装箱式evtol旋翼飞行器;
技术总结
本发明公开一种集装箱式eVTOL旋翼飞行器及eVTOL旋翼飞行器集群,包括:旋翼系统和货舱系统;旋翼系统中,沿旋翼机体的航向对称设置有至少2个升力短翼,每个升力短翼的端部通过支撑杆连接1个升力旋翼;沿旋翼机体的航向对称设置有至少2个拉力短翼,每个拉力短翼的前缘或后缘设置有拉力旋翼;旋翼系统用于在前飞过程中由升力短翼、升力旋翼和拉力短翼共同向飞行器提供升力,由拉力旋翼提供拉力;在垂直起降过程中由升力旋翼向飞行器提供升力;货舱系统连接于旋翼机体的底部,通过旋翼系统执行空中运输,在达目的地后与旋翼机体分离。本发明技术方案解决了现有构型的eVTOL飞行器实施过渡转换的技术难度较高,且过渡转换过程中存在安全隐患的问题。
技术研发人员:李尚斌,孙伟,张子瀚,袁明川,李春华
受保护的技术使用者:中国直升机设计研究所
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!