一种电动锁紧机构的制作方法
本发明属于航天锁紧与释放,涉及一种电动锁紧机构。
背景技术:
1、航天领域大型舱段级间连接分离、星箭连接分离、整流罩连接分离、太阳帆板压紧与释放等均需用到锁紧机构,普遍要求可靠性高,抗振动、冲击等力学环境适应性强,锁紧时可靠连接、解锁时快速释放。常用的锁紧机构构型一般为插/拔销式,地面准备时通过手动方式将锁定销伸入销孔内,并将锁定销机械限位,实现锁定功能;待收到释放信号后,通过气动、电动等作动元件首先解除锁定销的机械限位,锁定销在拔销弹簧的作用下从销孔内拔出,实现解锁功能。由于航天发射过程中发动机燃烧喷流和高马赫数下空气振动会对航天器产生较大能量的高频振动和冲击,采用这种锁紧方式的锁紧机构,在锁定销与销孔的接触面会出现较大的磨损,严重时甚至会导致锁定销和销孔金属黏连,增大了锁定销拔出过程中的阻力,若该阻力超过拔销弹簧可提供的弹性力,将带来无法解锁的问题,降低了发射的可靠性。同时插/拔销式锁紧机构在重新复位时,需要复位工装辅助插销重新插入销孔,且需要人工判读销孔是否对中,操作较复杂,可靠性不高。传统锁紧机构普遍采用插/拔销式机构构型,该构型中插销和销孔一般为面接触,需通过“滑动”的方式脱离接触,对接触面的表面质量和摩擦系数较为敏感。尤其当锁紧机构经历高频振动等恶劣力学环境后,接触面会出现较大的磨损,增大机构摩擦阻力,降低了锁紧机构的工作可靠性。严重时甚至会导致接触面出现金属黏连,使得摩擦阻力超过解锁动力,导致机构无法解锁。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提供一种可靠性高、力学环境适应性强、复位便捷的电动锁紧机构,解锁可靠性高,且复位操作便捷,无需额外的复位工装。
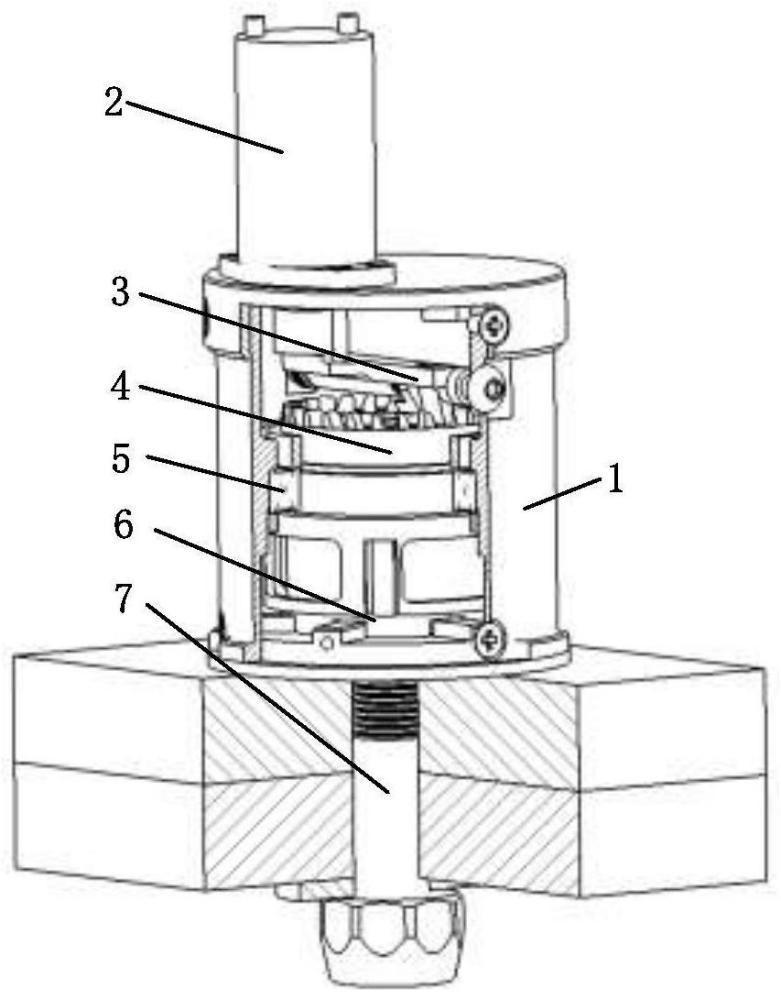
2、本发明的技术方案是:一种电动锁紧机构,包括:壳体、电机触发组件、锁紧组件、转盘组件、轴承、分瓣螺母组件和对接螺栓;电机触发组件、锁紧组件和分瓣螺母组件直接固定在壳体上,转盘组件通过轴承固定在壳体上,对接螺栓可旋入分瓣螺母组件内;在电动锁紧机构处于锁紧状态时,电机触发组件与锁紧组件相接触并压紧锁紧组件,使锁紧组件无法上翻,实现对转盘组件的持续锁定,转盘组件进一步维持分瓣螺母组件中的分瓣螺母处于并紧状态,对接螺栓旋入分瓣螺母内,并施加螺栓预紧力,实现锁紧功能。
3、所述壳体为内部中空的圆柱型壳体结构。
4、所述电机触发组件包括电机、电机座和摆杆;电机座通过紧固件固定在电动锁紧机构的壳体上,电机座上安装电机,电机的输出端连接有摆杆,摆杆可随电机输出轴同步转动;锁紧状态下,摆杆位于锁紧组件正上方并压紧锁紧组件,实现对锁紧组件的限位,使其无法上翻。
5、所述锁紧组件包括摆臂、锁定齿、摆臂复位扭簧、锁定齿复位扭簧和中心销轴;中心销轴穿过壳体,并通过一端的螺纹固定在壳体上;摆臂复位扭簧套装在中心销轴上,一端固定在壳体上,另一端固定在摆臂上;当摆臂绕中心销轴向上翻起时,将对摆臂复位扭簧施加弹性力,并将弹性势能储存在该摆臂复位扭簧内;锁定齿为齿形结构,与摆臂同轴安装并对摆臂单向限位,即锁定齿仅可绕摆臂的中心轴线逆时针旋转;当锁定齿顺时针旋转时带动摆臂顺时针同步旋转;锁定齿复位扭簧套装在中心销轴上,一端固定在摆臂上,另一端固定在锁定齿上;当锁定齿绕中心销轴逆时针旋转时,将对锁定齿复位扭簧施加弹性力,并将弹性势能储存在该锁定齿复位扭簧内;摆臂上的中间位置有一朝向壳体一侧的凸起,该凸起与摆杆接触并被压紧,摆臂的上翻动作将受到摆杆的机械限位。
6、所述转盘组件为回转体,可随轴承绕壳体的中心转动;转盘组件上端面沿环向分布有棘齿,用于与锁定齿啮合;当锁定齿与棘齿啮合时,转盘组件被限位,无法旋转;当锁定齿与棘齿脱离啮合时,转盘组件被解除限位,转盘组件可绕壳体的中心转动。
7、所述分瓣螺母组件由一个完整的螺母沿轴向均分为多瓣,形成多个分瓣螺母,各分瓣螺母重新闭合成一个螺母后,对接螺栓可以旋入并施加螺栓预紧力;当各分瓣螺母分开后,与对接螺栓脱离啮合,并释放对接螺栓。
8、所述多瓣为三瓣或者四瓣。
9、所述电动锁紧机构的解锁过程为:首先让电机通电旋转,带动摆杆旋转一定角度,使摆杆从凸起上移开,解除对摆臂的机械限位;此时,转盘组件上端面的棘齿通过锁定齿使锁紧组件上翻,使锁定齿与棘齿脱离啮合;失去限位后转盘组件将顺时针转动,带动分瓣螺母组件中的分瓣螺母由锁紧时的并紧状态逐渐转化为张开状态,并释放对接螺栓,实现电动锁紧机构解锁。
10、所述电动锁紧机构解锁后,仍可再次复位锁紧,过程如下:
11、在解锁时,当锁紧组件被推动上翻时,将对摆臂复位扭簧施加弹性力,并将弹性势能储存在该扭簧内;解锁完成后,锁紧组件将在摆臂复位扭簧储存的弹性势能作用下自动往回翻,使锁定齿重新与棘齿啮合,锁紧组件自动回到初始锁定状态;
12、让电机通电继续旋转,带动摆杆再次旋转至摆臂的凸起上,重新对摆臂施加机械限位;
13、手动逆时针转动转盘组件,棘齿将推动锁定齿逆时针摆动一定角度并与锁定齿再次脱离啮合,并对锁定齿复位扭簧施加弹性力,并将弹性势能储存在该扭簧内。当转盘组件逆时针转动到位后,分瓣螺母组件中的分瓣螺母将再次恢复至并紧状态,合并成一个完整的螺母,对接螺栓可再次旋入分瓣螺母内,并施加螺栓预紧力;同时锁定齿将在锁定齿复位扭簧储存的弹性势能作用下自动回翻,使锁定齿再次与转盘组件上的棘齿啮合,实现完整的复位。
14、本发明与现有技术相比的优点在于:
15、1)设计了一种棘齿锁定/解锁机构构型,在解锁时锁定齿与转盘棘齿的接触面通过“转动”的方式脱离接触。机构解锁时,在解锁力作用下首先使运动副转动并脱离大面积接触,避免了机构表面磨损对解锁阻力的影响,实现了锁紧机构的强环境适应性,提高了锁紧机构的解锁可靠性。锁紧机构即使在经历高频振动等恶劣力学环境后,表面出现严重的磨损损伤,仍可以有效解锁。
16、2)相对于传统插/拔销锁紧机构,解锁过程滑动摩擦动力与阻力的比值在有限空间内难以提高。本发明采用的机构构型在有限空间内使解锁动力力臂与阻力力臂具有较大的比值,具有较高的解锁裕度,解锁可靠性更高。
17、3)相对于传统插/拔销锁紧机构解锁后,需要复位工装辅助插销重新插入销孔,且需要人工判读销孔是否对中,操作较复杂,可靠性不高。本发明采用的棘齿机构集成在解锁机构上,棘齿在解锁时传递动力,在复位时能够实现转盘的自动锁定,无需额外工装即可便捷复位,也无需人工判读,复位操作更简单、便捷、可靠性更高。
技术特征:
1.一种电动锁紧机构,其特征在于,包括:壳体(1)、电机触发组件(2)、锁紧组件(3)、转盘组件(4)、轴承(5)、分瓣螺母组件(6)和对接螺栓(7);电机触发组件(2)、锁紧组件(3)和分瓣螺母组件(6)直接固定在壳体(1)上,转盘组件(4)通过轴承(5)固定在壳体(1)上,对接螺栓(7)可旋入分瓣螺母组件(6)内;在电动锁紧机构处于锁紧状态时,电机触发组件(2)与锁紧组件(3)相接触并压紧锁紧组件(3),使锁紧组件(3)无法上翻,实现对转盘组件(4)的持续锁定,转盘组件(4)进一步维持分瓣螺母组件(6)中的分瓣螺母处于并紧状态,对接螺栓(7)旋入分瓣螺母内,并施加螺栓预紧力,实现锁紧功能。
2.根据权利要求1所述的一种电动锁紧机构,其特征在于,所述壳体(1)为内部中空的圆柱型壳体结构。
3.根据权利要求1所述的一种电动锁紧机构,其特征在于,所述电机触发组件(2)包括电机(2-1)、电机座(2-2)和摆杆(2-3);电机座(2-2)通过紧固件固定在电动锁紧机构的壳体(1)上,电机座(2-2)上安装电机(2-1),电机(2-1)的输出端(2-4)连接有摆杆(2-3),摆杆(2-3)可随电机输出轴(2-4)同步转动;锁紧状态下,摆杆(2-3)位于锁紧组件(3)正上方并压紧锁紧组件(3),实现对锁紧组件(3)的限位,使其无法上翻。
4.根据权利要求3所述的一种电动锁紧机构,其特征在于,所述锁紧组件(3)包括摆臂(3-2)、锁定齿(3-3)、摆臂复位扭簧(3-1)、锁定齿复位扭簧(3-5)和中心销轴(3-4);中心销轴(3-4)穿过壳体(1),并通过一端的螺纹固定在壳体(1)上;摆臂复位扭簧(3-1)套装在中心销轴(3-4)上,一端固定在壳体(1)上,另一端固定在摆臂(3-2)上;当摆臂(3-2)绕中心销轴(3-4)向上翻起时,将对摆臂复位扭簧(3-1)施加弹性力,并将弹性势能储存在该摆臂复位扭簧(3-1)内;锁定齿(3-3)为齿形结构,与摆臂(3-2)同轴安装并对摆臂(3-2)单向限位,即锁定齿(3-3)仅可绕摆臂(3-2)的中心轴线逆时针旋转;当锁定齿(3-3)顺时针旋转时带动摆臂(3-2)顺时针同步旋转;锁定齿复位扭簧(3-5)套装在中心销轴(3-4)上,一端固定在摆臂(3-2)上,另一端固定在锁定齿(3-3)上;当锁定齿(3-3)绕中心销轴(3-4)逆时针旋转时,将对锁定齿复位扭簧(3-5)施加弹性力,并将弹性势能储存在该锁定齿复位扭簧(3-5)内;摆臂(3-2)上的中间位置有一朝向壳体(1)一侧的凸起(3-2-1),该凸起(3-2-1)与摆杆(2-3)接触并被压紧,摆臂(3-2)的上翻动作将受到摆杆(2-3)的机械限位。
5.根据权利要求4所述的一种电动锁紧机构,其特征在于,所述转盘组件(4)为回转体,可随轴承(5)绕壳体(1)的中心转动;转盘组件(4)上端面沿环向分布有棘齿(4-1),用于与锁定齿(3-3)啮合;当锁定齿(3-3)与棘齿(4-1)啮合时,转盘组件(4)被限位,无法旋转;当锁定齿(3-3)与棘齿(4-1)脱离啮合时,转盘组件(4)被解除限位,转盘组件(4)可绕壳体(1)的中心转动。
6.根据权利要求5所述的一种电动锁紧机构,其特征在于,所述分瓣螺母组件(6)由一个完整的螺母沿轴向均分为多瓣,形成多个分瓣螺母,各分瓣螺母重新闭合成一个螺母后,对接螺栓(7)旋入并施加螺栓预紧力;当各分瓣螺母分开后,与对接螺栓(7)脱离啮合,并释放对接螺栓(7)。
7.根据权利要求6所述的一种电动锁紧机构,其特征在于,所述多瓣为三瓣或者四瓣。
8.根据权利要求6所述的一种电动锁紧机构,其特征在于,所述电动锁紧机构的解锁过程为:首先让电机(2-1)通电旋转,带动摆杆(2-3)旋转一定角度,使摆杆(2-3)从凸起(3-2-1)上移开,解除对摆臂(3-2)的机械限位;此时,转盘组件(4)上端面的棘齿(4-1)通过锁定齿(3-3)使锁紧组件(3)上翻,使锁定齿(3-3)与棘齿(4-1)脱离啮合;失去限位后转盘组件(4)将顺时针转动,带动分瓣螺母组件(6)中的分瓣螺母由锁紧时的并紧状态逐渐转化为张开状态,并释放对接螺栓(7),实现电动锁紧机构解锁。
9.根据权利要求6所述的一种电动锁紧机构,其特征在于,所述电动锁紧机构解锁后,仍可再次复位锁紧,过程如下:
技术总结
本发明一种电动锁紧机构,包括壳体、电机触发组件、锁紧组件、转盘组件、轴承、分瓣螺母组件和对接螺栓;电机通电后带动摆杆旋转一定角度,使摆杆从摆臂上移开,解除对摆臂组件的机械限位。转盘组件上端面的棘齿通过锁定齿使摆臂组件上翻,锁定齿与棘齿脱离啮合。失去限位后转盘组件将顺时针快速转动,带动分瓣螺母组件中的分瓣螺母由锁紧时的并紧状态逐渐转化为张开状态,并释放对接螺栓,实现电动锁紧机构解锁。该机构解锁后可以再次复位、再次使用。采用“转动”方式脱离接触的解锁构型,可避免接触面表面磨损对解锁阻力的影响,具有较强的振动环境适应性、较高的解锁裕度、更高的解锁可靠性,同时复位操作更简单、便捷。
技术研发人员:周天送,于兵,张宏剑,陈华伟,马红鹏,潘忠文,石玉红,吴会强,王会平,张志峰,杨帆,佟文敏,王辰,郭嘉,乐晨,谢珏帆,胡勇,边旭,王筱宇
受保护的技术使用者:北京宇航系统工程研究所
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!