微重力模拟平台及使用方法
本发明涉及微重力模拟,具体地,涉及微重力模拟平台及使用方法。尤其涉及一种多末端输出机构的微重力模拟方法。
背景技术:
1、随着深空探测技术的发展,未来我国将实施对于小行星的着陆探测任务。在设计与控制方法测试阶段需要在地面上进行微重力模拟实验。小行星探测机器人通常有多个腿部支链,尤其是机身和腿部末端的重量较为集中。因此传统单末端输出的微重力模拟平台无法满足小行星探测机器人的实验需求。因此,实现一种在地面搭建多末端输出机构的微重力模拟平台对机器人测试以及宇航员的微重力训练有着重要的意义。
2、现有专利cn113602538b公开一种气浮式微重力模拟器及模拟方法,该专利未能解决腿部末端重量较为集中的问题。专利cn109515769b公开一种多星悬吊式微重力模拟系统,其同样未能解决腿部末端重量较为集中的问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种微重力模拟平台及使用方法。
2、根据本发明提供的一种微重力模拟平台,包括:刚性框架、电机、重力卸载装置以及弱弹性绳索;
3、所述刚性框架顶部设置光轴,所述重力卸载装置滑动安装在所述光轴上,所述重力卸载装置上设置电机,所述弱弹性绳索一端连接所述电机的输出轴,另一端连接机器人模型。
4、优选地,所述光轴设置有多个,多个所述光轴相互平行设置,每个所述光轴上设置有一个或多个所述重力卸载装置。
5、优选地,所述刚性框架上设置有距离传感器,所述距离传感器位于所述光轴轴向的两端所连接的刚性框架上。
6、优选地,所述重力卸载装置上设置定滑轮,所述弱弹性绳索的一端绕过所述定滑轮后连接在所述机器人模型的腿部支链末端或机身的质心处。
7、优选地,所述刚性框架的底面设置模拟地面,所述机器人模型位于所述光轴下方并放置在所述模拟地面上。
8、优选地,所述机器人模型设置有机身和多个腿部支链,所述机器人模型在所述模拟地面上沿平行光轴轴向爬行。
9、优选地,所述电机输出的拉力与所述机器人模型的重力相平衡。
10、优选地,所述刚性框架的顶面平行于所述刚性框架的底面。
11、优选地,所述电机和所述距离传感器连接实时控制器。
12、与现有技术相比,本发明具有如下的有益效果:
13、1、本申请设计一种微重力模拟平台,用于模拟在失重环境下宇航员或机器人的运动,并采用电机拉动弱弹性绳索的方案,实现对多末端机器人的重力卸载;
14、2、本申请将光轴固定在刚性框架上,通过装有定滑轮的重力卸载装置实现对机器人末端的跟随,微重力模拟平台上安装距离传感器,能够对重力卸载装置的位置进行测量。
技术特征:
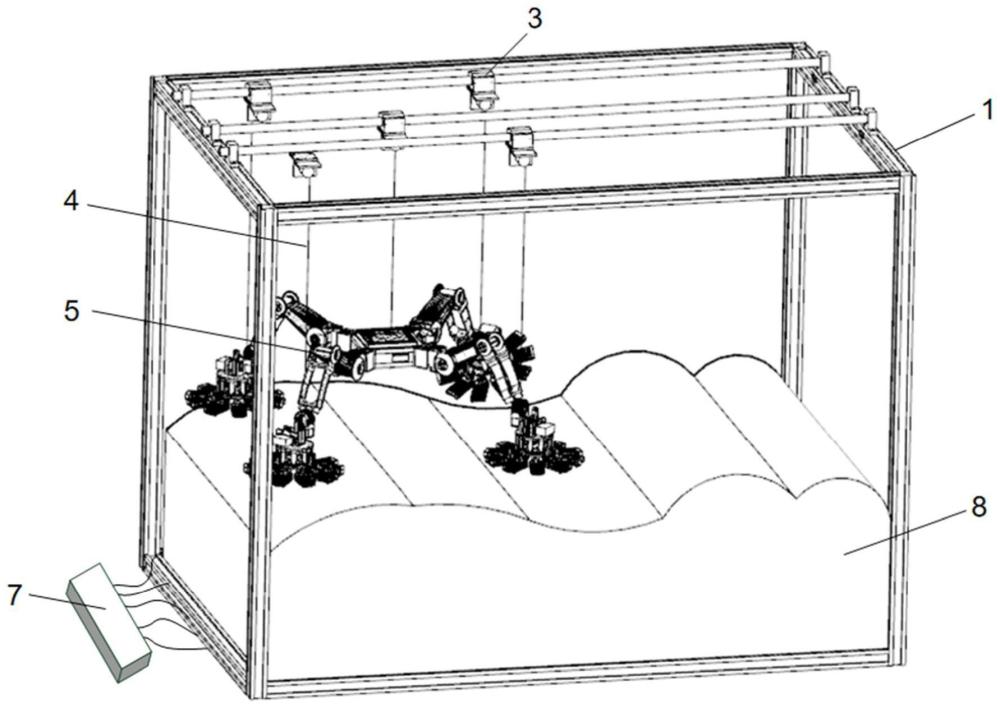
1.一种微重力模拟平台,其特征在于,包括:刚性框架(1)、电机(2)、重力卸载装置(3)以及弱弹性绳索(4);
2.根据权利要求1所述微重力模拟平台,其特征在于:所述光轴设置有多个,多个所述光轴相互平行设置,每个所述光轴上设置有一个或多个所述重力卸载装置(3)。
3.根据权利要求1所述微重力模拟平台,其特征在于:所述刚性框架(1)上设置有距离传感器(6),所述距离传感器(6)位于所述光轴轴向的两端所连接的刚性框架(1)上。
4.根据权利要求1所述微重力模拟平台,其特征在于:所述重力卸载装置(3)上设置定滑轮,所述弱弹性绳索(4)的一端绕过所述定滑轮后连接在所述机器人模型(5)的腿部支链末端或机身的质心处。
5.根据权利要求1所述微重力模拟平台,其特征在于:所述刚性框架(1)的底面设置模拟地面(8),所述机器人模型(5)位于所述光轴下方并放置在所述模拟地面(8)上。
6.根据权利要求5所述微重力模拟平台,其特征在于:所述机器人模型(5)设置有机身和多个腿部支链,所述机器人模型(5)在所述模拟地面(8)上沿平行光轴轴向爬行。
7.根据权利要求1所述微重力模拟平台,其特征在于:所述电机(2)输出的拉力与所述机器人模型(5)的重力相平衡。
8.根据权利要求1所述微重力模拟平台,其特征在于:所述刚性框架(1)的顶面平行于所述刚性框架(1)的底面。
9.根据权利要求3所述微重力模拟平台,其特征在于:所述电机(2)和所述距离传感器(6)连接实时控制器(7)。
10.一种权利要求9所述微重力模拟平台的使用方法,其特征在于,包括以下步骤:
技术总结
本发明提供了一种微重力模拟平台及使用方法,包括:刚性框架、电机、重力卸载装置以及弱弹性绳索;所述刚性框架顶部设置光轴,所述重力卸载装置滑动安装在所述光轴上,所述重力卸载装置上设置电机,所述弱弹性绳索一端连接所述电机的输出轴,另一端连接机器人模型。本申请设计一种微重力模拟平台,用于模拟在失重环境下宇航员或机器人的运动,并采用电机拉动弱弹性绳索的方案,实现对多末端机器人的重力卸载。
技术研发人员:何俊,闻勍鹏
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!