无人机用氢燃料电池电源系统及其控制方法与流程
本发明涉及新型电源,特别涉及一种无人机用氢燃料电池电源系统及其控制方法。
背景技术:
1、电动无人机的动力系统主要由动力电池、电调、电机和桨叶等组成。大多电动无人机动力系统只用锂电池作为动力电池,随着无人机作业应用领域的拓展,无人机的单次续航需求逐渐增大,目前仅使用锂电池作为动力电池的无人机续航普遍不到1小时,并且由于现有锂电池的比功率指标较难突破。因此,无人机受限自身载重要求无法载重更大的电池增加其续航。氢燃料电池由于使用氢气燃料直接发电,结合轻量化设计其比功率可远大于锂电池,产生的水和气对环境也无任何污染。目前,普遍采用锂电池和氢燃料电池的混合动力系统作为无人机动力系统。
2、现有的氢燃料电池与锂电池混合使用的无人机动力系统控制方法主要由飞控模块根据氢气消耗量和锂电池的能量利用率估算判断两种电池的状态,由于算法的长期运行误差和算法的不可靠性会引起燃料电池或锂电池状态判断有误,长期的使用会呈现电池性能阶梯式下降,加速燃料电池和锂电池的失效和寿命衰减。
技术实现思路
1、本发明的目的是提供一种无人机用氢燃料电池电源系统及其控制方法,针对电动无人机的长续航电源需求,在原有无人机动力电池的上增加一套氢气模块、燃料电池模块和电力转换模块,组成一套混合电源系统,利用飞控模块采集的锂电池的电压和氢气模块的瓶内压力对电调发送运行命令和对燃料电池模块发出启动、加载、额定功率运行、降载或停机等命令,在不过多增加无人机额外的载重条件下,大大提升了无人机的续航能力。
2、为了实现以上目的,本发明通过以下技术方案实现:
3、一种无人机用氢燃料电池电源系统的控制方法,所述无人机用氢燃料电池电源系统包括:氢气模块、燃料电池、电力转换模块、锂电池和飞控模块;
4、所述控制方法包括:
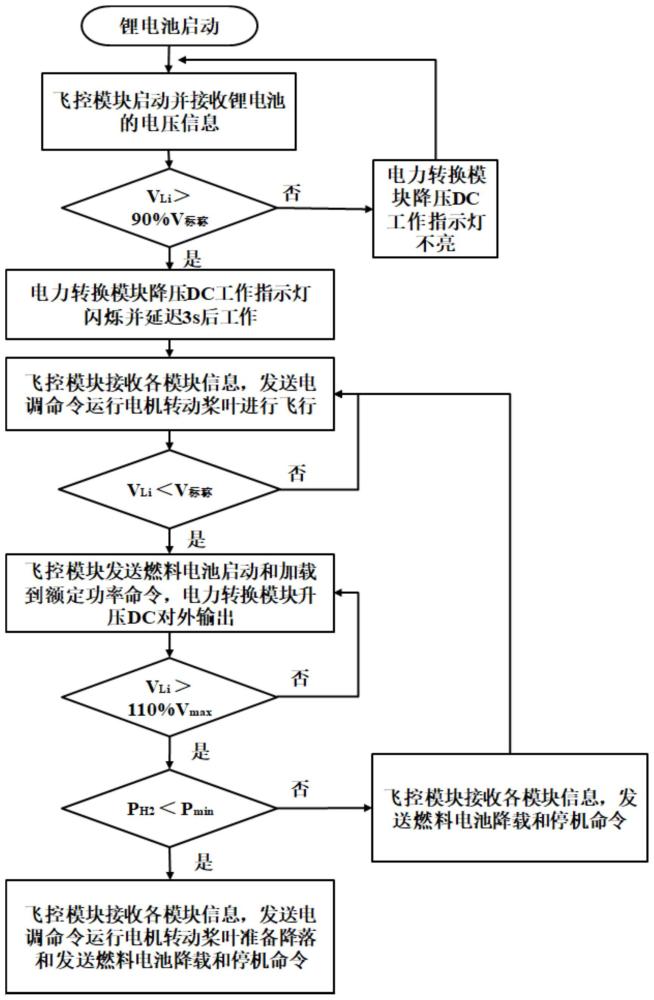
5、锂电池上电后,飞控模块启动并接收锂电池当前的电压值,判断电压值是否满足无人机起飞条件,如果满足,则飞控模块发送起飞命令给电调,控制电机转速,进而控制桨叶转动,以控制无人机的飞行状态;
6、电力转换模块的降压变换器工作,使燃料电池的辅件上电工作,燃料电池处于待机状态;
7、飞控模块监测锂电池当前的电压值,判断电压值是否满足燃料电池启动条件,如果满足,发送燃料电池启动和加载到额定功率命令给燃料电池,燃料电池逐步加载到额定功率并保持额定功率运行,电力转换模块的升压变换器得电工作,将燃料电池的电压平台转换为锂电池当前电压平台;
8、飞控模块监测锂电池当前的电压值,判断电压值是否满足第一燃料电池停机条件,如果满足,发送燃料电池降载和停机命令给燃料电池,燃料电池逐步降载到0a并保持氢进电磁阀关闭;
9、飞控模块监测氢气模块瓶内压力值,判断瓶内压力值是否满足无人机降落条件,如果满足,发送燃料电池降载和停机命令给燃料电池,燃料电池逐步降载到0a并保持氢进电磁阀关闭。
10、可选地,判断电压值是否满足无人机起飞条件,包括:
11、判断电压值是否大于90%v标称,如果大于,则判定电压值满足无人机起飞要求,如果不大于,则判定电压值不满足无人机起飞要求,所述v标称表示锂电池的标称电压。
12、可选地,判断电压值是否满足燃料电池启动条件,包括:
13、判断是否持续第一预设时长监测到电压值小于v标称,如果是,则判定电压值满足燃料电池启动条件,如果否,则判定电压值不满足燃料电池启动条件,所述v标称表示锂电池的标称电压。
14、可选地,判断电压值是否满足燃料电池停机条件,包括:
15、判断是否持续第二预设时长监测到电压值大于110%v标称,如果是,则判定电压值满足燃料电池停机条件,如果否,则判定电压值不满足燃料电池停机条件,所述v标称表示锂电池的标称电压。
16、可选地,判断瓶内压力值是否满足无人机降落条件,包括:
17、判断是否持续第三预设时长监测到瓶内压力值小于预设的瓶内最小压力值,如果是,则判定瓶内压力值满足无人机降落条件,如果否,则判定瓶内压力值不满足无人机降落条件。
18、可选地,当飞控模块监测电压值满足燃料电池停机条件且控制燃料电池降载和停机后,若再次监测到电压值满足燃料电池启动条件,则再次发送燃料电池启动和加载到额定功率命令给燃料电池,燃料电池逐步加载到额定功率并保持额定功率运行,电力转换模块的升压变换器得电工作,将燃料电池模块的电压平台转换为锂电池模块当前电压平台。
19、可选地,当飞控模块监测氢气模块瓶内压力值满足无人机降落条件时,还包括:飞控模块发送降机命令给电调,控制电机转速,进而控制桨叶转动准备降落。
20、可选地,在燃料电池模块保持额定功率运行的过程中,飞控模块监测是否接收到降机指令,如果是,则飞控模块首先发送降机命令给电调,控制电机转速,进而控制桨叶转动准备降落,再发送燃料电池降载和停机命令给燃料电池,燃料电池逐步降载到0a并保持氢进电磁阀关闭。
21、一种无人机用氢燃料电池电源系统,用于实现如上文任一项所述的无人机用氢燃料电池电源系统的控制方法,所述无人机用氢燃料电池电源系统包括:氢气模块、燃料电池、电力转换模块、锂电池、电调、电机、桨叶和飞控模块;
22、所述氢气模块,用于存储氢气燃料,设有集成瓶内压力检测、瓶口压力减压和氢气截止功能的一体式瓶口阀装置;
23、所述燃料电池,用于消耗氢气和空气中的氧气产生电能;
24、所述电力转换模块,用于对燃料电池输出的电压平台转换为锂电池的电压平台和对锂电池的电压平台转换为燃料电池辅件运行所需的低电压平台;
25、所述锂电池,用于连接电力转换模块转换电压和对电调进行电能输出;
26、所述飞控模块,用于根据锂电池的电压和氢气模块瓶内压力控制电调输出从而间接控制无人机的飞行姿态,以及控制燃料电池的启停和升降载。
27、可选地,所述燃料电池为鼓风机供应反应空气的阴极闭式空冷燃料电池模块,采用钛基金属双极板。
28、与现有无人机用电源系统技术相比,本发明的有益效果如下:
29、本发明提供的无人机用氢燃料电池电源系统及其控制方法,将锂电池和燃料电池组成混合动力可解决纯锂电池续航短的问题,采用飞控模块检测锂电池电压和氢瓶内压力,可较准确判断锂电池剩余容量和燃料电池剩余工作时间,提高无人机运行状态的可靠性。此外,采用反应空气由鼓风机供应和钛基薄型金属板工艺,可大大降低燃料电池模块的重量,提高无人机高海拔低气压环境适应性。
技术特征:
1.一种无人机用氢燃料电池电源系统的控制方法,其特征在于,所述无人机用氢燃料电池电源系统包括:氢气模块、燃料电池、电力转换模块、锂电池和飞控模块;
2.如权利要求1所述的无人机用氢燃料电池电源系统的控制方法,其特征在于,判断电压值是否满足无人机起飞条件,包括:
3.如权利要求1所述的无人机用氢燃料电池电源系统的控制方法,其特征在于,判断电压值是否满足燃料电池启动条件,包括:
4.如权利要求1所述的无人机用氢燃料电池电源系统的控制方法,其特征在于,判断电压值是否满足燃料电池停机条件,包括:
5.如权利要求1所述的无人机用氢燃料电池电源系统的控制方法,其特征在于,判断瓶内压力值是否满足无人机降落条件,包括:
6.如权利要求1所述的无人机用氢燃料电池电源系统的控制方法,其特征在于,当飞控模块监测电压值满足燃料电池停机条件且控制燃料电池降载和停机后,若再次监测到电压值满足燃料电池启动条件,则再次发送燃料电池启动和加载到额定功率命令给燃料电池,燃料电池逐步加载到额定功率并保持额定功率运行,电力转换模块的升压变换器得电工作,将燃料电池模块的电压平台转换为锂电池模块当前电压平台。
7.如权利要求1所述的无人机用氢燃料电池电源系统的控制方法,其特征在于,当飞控模块监测氢气模块瓶内压力值满足无人机降落条件时,还包括:飞控模块发送降机命令给电调,控制电机转速,进而控制桨叶转动准备降落。
8.如权利要求1所述的无人机用氢燃料电池电源系统的控制方法,其特征在于,在燃料电池模块保持额定功率运行的过程中,飞控模块监测是否接收到降机指令,如果是,则飞控模块首先发送降机命令给电调,控制电机转速,进而控制桨叶转动准备降落,再发送燃料电池降载和停机命令给燃料电池,燃料电池逐步降载到0a并保持氢进电磁阀关闭。
9.一种无人机用氢燃料电池电源系统,其特征在于,用于实现如权利要求1~8任一项所述的无人机用氢燃料电池电源系统的控制方法,所述无人机用氢燃料电池电源系统包括:氢气模块、燃料电池、电力转换模块、锂电池和飞控模块;
10.如权利要求9所述的无人机用氢燃料电池电源系统,其特征在于,所述燃料电池为鼓风机供应反应空气的阴极闭式空冷燃料电池模块,采用钛基金属双极板。
技术总结
本发明提供一种无人机用氢燃料电池电源系统及其控制方法,针对电动无人机的长续航电源需求,在原有无人机动力电池的上增加一套氢气模块、燃料电池模块和电力转换模块,组成一套混合电源系统,利用飞控模块采集的锂电池的电压和氢气模块的瓶内压力对电调发送运行命令和对燃料电池模块发出启动、加载、额定功率运行、降载或停机等命令,在不过多增加无人机额外的载重条件下,大大提升了无人机的续航能力。
技术研发人员:赵邓玉,程龙,雷晓熙,曹文娟,刘海亮,蒋永伟,朱荣杰,王涛
受保护的技术使用者:航天氢能(上海)科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!