入水降载装置及仿生跨介质飞行器的制作方法
本发明涉及跨介质飞行器,具体涉及一种入水降载装置和设有该输入降载装置的仿生跨介质飞行器。
背景技术:
1、跨介质飞行器是一种可在空中与水中两栖巡航并能自由穿越水气界面的一种新型航行器。跨介质飞行器兼具传统无人机的高机动性及水上无人机的快速部署能力和水下航行器的高隐蔽性,具有传统无人机无法比拟的优势。在军事领域,跨介质飞行器能够作为跨介质武器、信息交互平台和侦察预警设备等。在民用领域,跨介质飞行器可广泛用于海上搜救、水质检测、水下生物观测和气象预报等任务。
2、跨介质飞行器主要有三种入水方式,滑落式入水、冲击入水和软着陆。滑落式入水模拟水上飞机的滑行和潜艇的潜水。冲击入水式飞行器从高处垂直冲向水面,这种方式的缺陷是冲击载荷较大,对头部容易造成损失且入水后需要进行大迎角的姿态调节。软着陆方式飞行器通常是多旋翼布局,它通过降低多旋翼的转速平稳地着陆到水面上,这种方式的缺陷是着陆速度较慢,多旋翼的能耗较高。
3、滑落入水是跨介质飞行器最为常用的入水方式,得益于水上飞机技术的成熟,这种入水方式被广泛应用于现有的跨介质飞行器上。目前采用滑落入水方式的飞行器在布局上,主要为船身式或浮筒式两大类,前者是将机身下部设计成船底形状(俗称“飞艇”),后者是在机身或机翼下安装1~3个舟形浮筒。但这两种布局不适于高速飞行,且结构笨重,对抗浪性能要求较高,维修和制造成本也较高。
技术实现思路
1、为了解决上述技术问题,本发明提供一种入水降载装置和一种仿生跨介质飞行器。
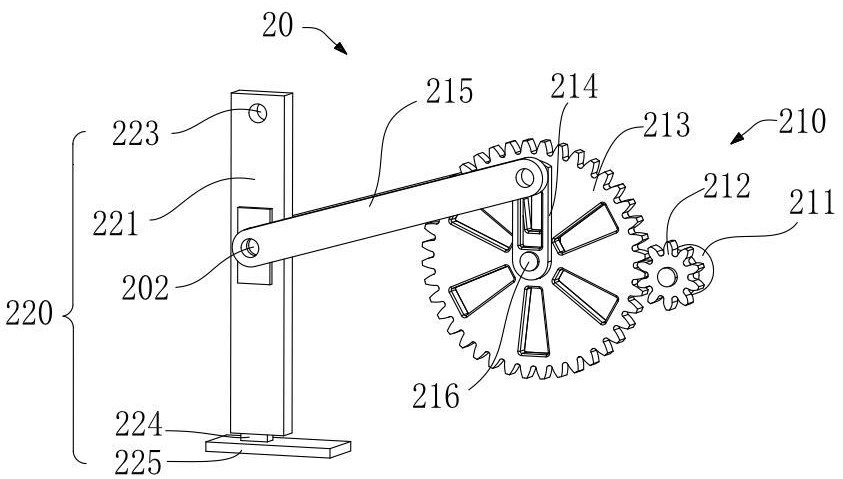
2、第一方面,本发明提供一种入水降载装置,适用于跨介质飞行器从空中进入水中的过程,入水降载装置包括摆动驱动机构和动作执行机构。摆动驱动机构设有第一旋转支点和输出端,动作执行机构设有第二旋转支点。摆动驱动机构的输出端与动作执行机构铰接形成铰接点。摆动驱动机构通过改变第一旋转支点和铰接点的距离从而使动作执行机构能够绕第二旋转支点摆动。
3、在一些实施方式中,摆动驱动机构包括曲柄和连杆,第一旋转支点设置于曲柄的一端,曲柄的另一端与连杆的一端铰接,连杆的另一端为摆动驱动机构的输出端。曲柄绕第一旋转支点旋转从而带动动作执行机构摆动。
4、在一些实施方式中,摆动驱动机构还包括电动机、第一齿轮和第二齿轮。电动机与第一齿轮连接,第二齿轮与第一齿轮啮合,第二齿轮的转速慢于第一齿轮的转速。曲柄的一端连接至第二齿轮的轴心,曲柄和第二齿轮同轴转动,第二齿轮的轴心为第一旋转支点。优选地,电动机的转动速度是可调节的,动作执行机构的摆动频率随电动机的转动速度的调节而被调节。
5、在一些实施方式中,摆动驱动机构为直线伸缩机构,该直线伸缩机构具有纵向延伸的直线伸缩主体和伸缩杆,伸缩杆可相对直线伸缩主体纵向移动,直线伸缩主体设有第一旋转支点,伸缩杆具有自由端,该自由端为摆动驱动机构的输出端。
6、具体地,动作执行机构包括执行主体和起落架,第二旋转支点设置于执行主体上,摆动驱动机构的输出端与执行主体铰接,起落架可伸缩或可折叠地连接至执行主体。动作执行机构具有收缩状态和伸展状态。当入水降载装置处于非工作状态时,动作执行机构处于收缩状态,起落架的伸出端靠近执行主体。当入水降载装置处于工作状态时,动作执行机构处于伸展状态,起落架的伸出端远离执行主体。
7、优选地,起落架可伸缩地连接至执行主体,第二旋转支点位于执行主体的远离水面的一端,铰接点位于执行主体的中部。优选地,起落架的伸出端设有起落架头部,起落架头部的端面面积大于起落架的伸出端的端面面积。
8、第二方面,本发明提供一种仿生跨介质飞行器,包括机身和上述第一方面的入水降载装置,机身的底部设有收放槽。摆动驱动机构固定设置于机身的内部,动作执行机构的执行主体可转动的连接至机身,动作执行机构可通过收放槽伸出至水面或缩进机身内。进一步地,收放槽呈方形,收放槽沿机身的长度方向的长度大于或等于动作执行机构的摆动幅程。
9、本发明的特点及优点包括:
10、本发明参考天鹅入水过程进行仿生学设计,在降落过程动作执行机构(天鹅的足蹼)可以在水面摆动拍打,足蹼和水面的相互作用降低了机体接触水面时的冲击力,提升了入水时的稳定性,从而可以高效、快速地在水上降落。
技术特征:
1.一种入水降载装置,适用于跨介质飞行器从空中进入水中的过程,其特征在于,所述入水降载装置包括:摆动驱动机构(210)和动作执行机构(220);
2.根据权利要求1所述的入水降载装置,其特征在于,所述摆动驱动机构(210)包括曲柄(214)和连杆(215);所述第一旋转支点(216)设置于所述曲柄(214)的一端,所述曲柄(214)的另一端与所述连杆(215)的一端铰接;所述连杆(215)的另一端为所述摆动驱动机构(210)的输出端;
3.根据权利要求2所述的入水降载装置,其特征在于,所述摆动驱动机构(210)还包括电动机(211)、第一齿轮(212)和第二齿轮(213);
4.根据权利要求3所述的入水降载装置,其特征在于,所述电动机(211)的转动速度是可调节的,所述动作执行机构(220)的摆动频率随所述电动机(211)的转动速度的调节而被调节。
5.根据权利要求1所述的入水降载装置,其特征在于,所述摆动驱动机构(210)为直线伸缩机构,所述直线伸缩机构具有纵向延伸的直线伸缩主体和伸缩杆,所述伸缩杆可相对所述直线伸缩主体纵向移动,所述直线伸缩主体设有所述第一旋转支点(216),所述伸缩杆具有自由端,所述自由端为所述摆动驱动机构(210)的输出端。
6.根据权利要求1~5任一项所述的入水降载装置,其特征在于,所述动作执行机构(220)包括执行主体(221)和起落架(224),所述第二旋转支点(223)设置于所述执行主体(221)上,所述摆动驱动机构(210)的输出端与所述执行主体(221)铰接,所述起落架(224)可伸缩或可折叠地连接至所述执行主体(221);
7.根据权利要求6所述的入水降载装置,其特征在于,所述起落架(224)可伸缩地连接至所述执行主体(221),所述第二旋转支点(223)位于所述执行主体(221)的远离水面的一端,所述铰接点(202)位于所述执行主体(221)的中部。
8.根据权利要求6所述的入水降载装置,其特征在于,所述起落架(224)的伸出端设有起落架头部(225),所述起落架头部(225)的端面面积大于所述起落架(224)的伸出端的端面面积。
9.一种仿生跨介质飞行器,其特征在于,包括机身(30)和权利要求6~8任一项所述的入水降载装置(20),所述机身(30)的底部设有收放槽(31);
10.根据权利要求9所述的仿生跨介质飞行器,其特征在于,所述收放槽(31)呈方形,所述收放槽(31)沿机身的长度方向的长度大于或等于所述动作执行机构(220)的摆动幅程。
技术总结
本发明涉及跨介质飞行器技术领域,公开一种入水降载装置和包含其的仿生跨介质飞行器。入水降载装置包括摆动驱动机构和动作执行机构,摆动驱动机构设有第一旋转支点和输出端,动作执行机构设有第二旋转支点,摆动驱动机构的输出端与动作执行机构铰接形成铰接点,摆动驱动机构通过改变第一旋转支点和铰接点的距离从而使动作执行机构能够绕第二旋转支点摆动。仿生跨介质飞行器包括机身和前述的入水降载装置,机身的底部设有收放槽;摆动驱动机构和动作执行机构固定设置于机身的内部,动作执行机构通过收放槽伸出至水面或缩进机身内。本发明可以提升飞行器入水时的稳定性,从而可以高效、快速地在水上降落。
技术研发人员:高福奎,周后村,白兴之,余雷,张哲,范召林,吴文华,李鑫林
受保护的技术使用者:中国空气动力研究与发展中心空天技术研究所
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!