一种共轴复合翼电动垂直起降飞机的制作方法
本发明涉及航空,特别涉及一种共轴复合翼电动垂直起降飞机。
背景技术:
1、随着动力电池和分布式电动系统的快速发展,电动垂直起降飞机市场逐渐发展成熟,电动垂直起降飞机构型一般分为多旋翼、复合翼和倾转旋翼等构型。
2、其中,多旋翼构型完全由升力螺旋桨来提供升力和平飞的推力,飞机整体上没有采用空气动力学设计,导致飞机的航时和航程均较短。
3、倾转旋翼构型通过为动力舱增加转动机构进而实现矢量飞行能力,转动机构与动力舱合称为倾转动力单元,倾转动力单元既用于产生升力又用于产生推力,这虽然在一定程度上解决了飞机航程和留空时间的缺陷,但同时也增加飞机的设计复杂度并牺牲了安全性设计指标。
4、复合翼构型同时包含升力旋翼和固定翼,其通过多旋翼实现垂直起降功能,同时其配置的固定机翼的高升阻比特性又兼具更高的飞行效率,从而能够有效提高飞机的航时和航程。
5、例如公开号为cn111655578a的中国发明专利,其公开了一种固定翼垂直起降混合动力uav,其包括四个用于提供升力的旋翼以及一个用于提供平推力的尾推桨,同时其还兼具有两个固定翼。
6、然而该专利公开的飞行器在飞行时,虽然整体上能够实现旋翼的扭矩平衡,但其机身两侧会分别受到来自于两个固定翼的侧向力,该侧向力来自于旋翼,其原因在于固定翼上所安装的两个旋翼之间具有较大的跨度,因此无法相互平衡扭矩对机身的影响,从而对飞行器的结构载荷和稳定性产生不利影响。另外,由于其尾推桨仅有一个,因此飞行器飞行时还需要抵消尾推桨的扭矩才能够保持其自身的平衡,这显然会给飞行控制系统带来额外的控制负担。
技术实现思路
1、针对现有技术存在的复合翼飞行器工作时机身会受到来自于旋翼的侧向力影响的问题,本发明的目的在于提供一种共轴复合翼电动垂直起降飞机,以便于至少部分地解决上述问题。
2、为实现上述目的,本发明的技术方案为:
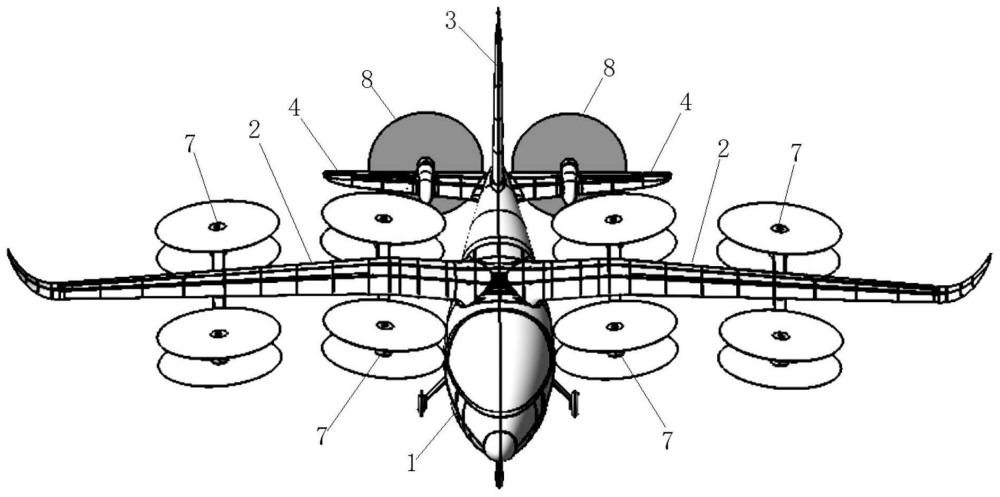
3、一种共轴复合翼电动垂直起降飞机,包括机身、两个呈对称状设置在所述机身的左右两侧的机翼、设置在所述机身的尾部中心处的垂直尾翼以及两个呈对称状设置在所述机身的尾部处的水平尾翼,所述机翼上均设有副翼,所述垂直尾翼上设有方向舵,所述水平尾翼上均设有升降舵;
4、其中,两个所述机翼均安装有升降组件,两个所述水平尾翼的后侧均安装有推进组件;所述升降组件包括与所述机翼固定连接的升降支臂以及两个分别固定安装在所述升降支臂的上下两侧的升力电机,所述升力电机上均安装有升力螺旋桨,且两个所述升力电机共轴布置;所述推进组件包括与所述水平尾翼固定连接的推进支臂以及固定安装在所述推进支臂上的推进电机,所述推进电机上安装有推进螺旋桨。
5、在一优选实施例中,固定安装在同一升降支臂上的两个所述升力电机使用时转向相反,两个所述推进组件使用时转向相反。
6、在一优选实施例中,所述机翼的前后两侧均安装有升降组件。
7、在一优选实施例中,每个所述机翼的前侧和后侧均设置有两个所述升降组件,8个所述升降组件关于所述机身的中轴线对称布置。
8、在一优选实施例中,所述机翼前侧处的两个升降组件分别与所述机翼后侧处的两个升降组件前后相对。
9、在一优选实施例中,前后相对的两个升降组件共用同一个所述升降支臂。
10、在一优选实施例中,还包括控制系统,所述控制系统包括飞行控制单元以及与所述飞行控制单元通讯连接的惯性测量单元、大气传感器、磁力计、通信单元和gnss模块;所述惯性测量单元用于检测飞机的三轴加速度值、以及俯仰角速度、滚转角速度、偏航角速度信息;所述大气传感器用于检测静压、动压及总温信息,以便于所述飞行控制单元进行气压高度解算、空速解算、垂直速度解算;所述磁力计用于检测飞机的三轴磁力计数据,以便于所述飞行控制单元进行当前磁航向解算;所述通信单元用于在所述飞行控制单元与地面控制站之间建立数据链接;所述gnss模块有用于提供位置信号,以便于所述飞行控制单元进行飞机位置修正;
11、其中,所述飞行控制单元还通过多路pwm通道分别控制所述副翼、所述方向舵、所述升降舵、所述升力电机以及所述推进电机,以便于实现预期的飞行航迹。
12、在一优选实施例中,所述惯性测量单元有两个并互为冗余;所述gnss模块包括gps定位模块和北斗定位模块,并互为冗余。
13、采用上述技术方案,本发明的有益效果在于:相比于传统的复合翼垂直起降飞机,本发明中由于升降组件中包含两个共轴布置的升力电机,使得对于单个升降组件来说,其中的两个共轴布置的升力电机反转后即能够相互抵消扭矩,从而使升降组件整体上不对外施加扭矩影响,这使得机身不会受到额外的侧向力影响,进而有利于飞行器的结构载荷和稳定性。另外由于左右对称的两个推进组件的设置,使得两个推进组件只需要反转就可以相互抵消扭矩,进而使飞行控制系统无需进行额外的扭矩配平操作。
技术特征:
1.一种共轴复合翼电动垂直起降飞机,其特征在于:包括机身、两个呈对称状设置在所述机身的左右两侧的机翼、设置在所述机身的尾部中心处的垂直尾翼以及两个呈对称状设置在所述机身的尾部处的水平尾翼,所述机翼上均设有副翼,所述垂直尾翼上设有方向舵,所述水平尾翼上均设有升降舵;
2.根据权利要求1所述的共轴复合翼电动垂直起降飞机,其特征在于:固定安装在同一升降支臂上的两个所述升力电机使用时转向相反,两个所述推进组件使用时转向相反。
3.根据权利要求1所述的共轴复合翼电动垂直起降飞机,其特征在于:所述机翼的前后两侧均安装有升降组件。
4.根据权利要求3所述的共轴复合翼电动垂直起降飞机,其特征在于:每个所述机翼的前侧和后侧均设置有两个所述升降组件,且8个所述升降组件关于所述机身的中轴线对称布置。
5.根据权利要求4所述的共轴复合翼电动垂直起降飞机,其特征在于:所述机翼前侧处的两个升降组件分别与所述机翼后侧处的两个升降组件前后相对。
6.根据权利要求5所述的共轴复合翼电动垂直起降飞机,其特征在于:前后相对的两个升降组件共用同一个所述升降支臂。
7.根据权利要求1所述的共轴复合翼电动垂直起降飞机,其特征在于:还包括控制系统,所述控制系统包括飞行控制单元以及与所述飞行控制单元通讯连接的惯性测量单元、大气传感器、磁力计、通信单元和gnss模块;所述惯性测量单元用于检测飞机的三轴加速度值以及俯仰角速度、滚转角速度、偏航角速度信息;所述大气传感器用于检测静压、动压及总温信息,以便于所述飞行控制单元进行气压高度解算、空速解算、垂直速度解算;所述磁力计用于检测飞机的三轴磁力计数据,以便于所述飞行控制单元进行当前磁航向解算;所述通信单元用于在所述飞行控制单元与地面控制站之间建立数据链接;所述gnss模块有用于提供位置信号,以便于所述飞行控制单元进行飞机位置修正;
8.根据权利要求7所述的共轴复合翼电动垂直起降飞机,其特征在于:所述惯性测量单元有两个并互为冗余;所述gnss模块包括gps定位模块和北斗定位模块,并互为冗余。
技术总结
本发明公开了一种共轴复合翼电动垂直起降飞机,属于航空领域,包括机身、机翼、垂直尾翼和水平尾翼,机翼上设有副翼,垂直尾翼上设有方向舵,水平尾翼上设有升降舵;机翼上安装有升降组件,水平尾翼的后侧安装有推进组件;升降组件包括与机翼固定连接的升降支臂以及两个分别固定安装在升降支臂的上下两侧的升力电机,升力电机上均安装有升力螺旋桨,两个升力电机共轴布置;推进组件包括与水平尾翼固定连接的推进支臂以及固定安装在推进支臂上的推进电机,推进电机上安装有推进螺旋桨。相比于传统技术,本发明不但能够避免机身受到侧向力的影响,而且还能够平衡推进桨的扭矩,使飞行控制系统无需进行额外的扭矩配平操作。
技术研发人员:贾晓东
受保护的技术使用者:上海览翌航空科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!