一种无杆式电动牵引车的牵引装置及牵引方法与流程
本发明涉及牵引车领域,尤其涉及一种无杆式电动牵引车的牵引装置。
背景技术:
1、无杆式飞机牵引车通过夹持举升机构,将飞机鼻轮加紧、抱起后驮附在牵引车上进行牵引作业,其可将飞机自身重量的10%~15%最大限度的转化为牵引车的重量,提高了其牵引和制动的能力,同时还省去了牵引杆设备。
2、现有的无杆式电动牵引车的牵引装置由于没有牵引杆,稳定性会相对较差,在牵引过程中,如果遇到颠簸的路面或机体重量较大的情况,容易导致牵引车与飞机之间的连接不稳定,甚至发生脱钩的现象,存在牵引力不足的问题,另一方面,现有的牵引装置在进行转向时需要较大的转向空间与操作空间,导致转向操作不够灵活,使用起来不够便捷。
3、针对现有技术中存在的技术问题,本发明提供了一种无杆式电动牵引车的牵引装置,以解决上述问题。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种无杆式电动牵引车的牵引装置。
2、为了实现上述目的,本发明采用了如下技术方案:
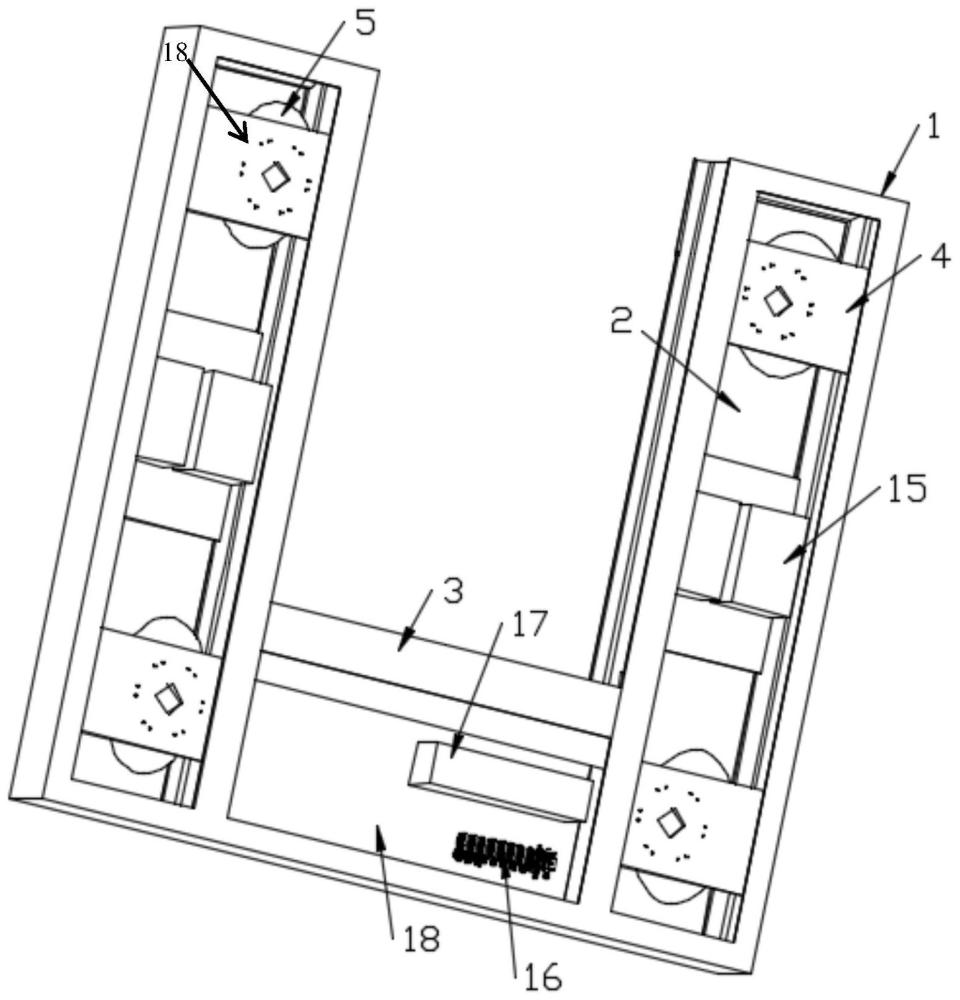
3、一种无杆式电动牵引车的牵引装置,包括槽钢架,所述槽钢架呈u型,所述槽钢架上开设有对称设置的两个第一安装槽,两个所述第一安装槽的顶端均设有均匀分布的两个安装板,四个所述安装板上均设有转向机构,所述转向机构包括转动安装在安装板底部的第一传动轮,所述第一传动轮的底部固定安装有固定板,所述固定板上开设有两个对称设置的安装孔,所述固定板的底部固定安装有位于其一安装孔正下方的第二电机,所述第二电机的输出轴贯穿其一安装孔并固定安装有第二传动轮,所述第一传动轮与第二传动轮啮合连接。
4、优选地,四个所述固定板的底部均固定安装有安装座,四个所述安装座均呈u型,四个所述安装座上均转动安装有行走轮。
5、优选地,四个所述安装座的一外侧壁上均固定安装有第一电机,四个所述第一电机的输出轴均与相邻行走轮的转轴固定连接。
6、优选地,两个所述第一安装槽内均设有两个第一电源,两两所述第一电源均位于相邻两个安装板之间,四个所述第一电源均与相邻的第一电机、第二电机电连接。
7、优选地,所述槽钢架上开设有位于两个第一安装槽之间的第二安装槽,所述第二安装槽内设有控制器,所述第二安装槽内设有位于控制器一侧的第二电源,所述第二电源与控制器电连接,所述控制器与四个第一电源、四个第一电机、四个第二电机电连接。
8、优选地,所述槽钢架的两内侧壁之间固定安装有同一加强筋,所述加强筋采用工字钢材质。
9、优选地,所述固定板的顶部固定安装有垫块,所述垫块的顶面与第一传动轮的底面相贴。
10、优选地,所述安装座的另一外侧壁上固定安装有固定座,所述固定座的中心处与行走轮的转轴转动连接。
11、本发明还提出了一种无杆式电动牵引车的牵引方法,包括以下步骤:
12、第一步,打开第二电源,使控制器通电启动,通过控制器控制四个第一电机运转,四个行走轮转动并使牵引车移动至指定位置;
13、第二步,当牵引车托举起飞机前轮后,通过控制器控制四个第一电机运转,拖动飞机移动;
14、第三步,需要转向时,控制器控制启动四个第二电机运转,第二电机的输出轴通过驱动第二传动轮与第一传动轮啮合,使得固定板带着行走轮旋转至指定角度,完成转向操作,从而使飞机的前轮旋转至指定角度,通过四个行走轮持续移动,需要转向时重复上述操作即可,直至飞机移动至指定位置。
15、本发明与现有技术相比,其有益效果为:
16、1、本发明通过设置安装座、行走轮、第一电机和固定座,利用四轮驱动可以提供更大牵引力,能够牵引重量更大的飞机,四轮驱动能够使牵引车更加平稳的运动,遇到路面颠簸的情况也能避免脱钩的现象发生;
17、2、本发明通过设置固定板、第一传动轮、第二传动轮、垫块、第二电机和安装孔,四个第二电机都能识别旋转阻力,并执行精确的转动操作,可实现零转弯半径,转向操作更加灵活,在更小的操作空间就能完成转向。
技术特征:
1.一种无杆式电动牵引车的牵引装置,包括槽钢架(1),其特征在于,所述槽钢架(1)呈u型,所述槽钢架(1)上开设有对称设置的两个第一安装槽(2),两个所述第一安装槽(2)的顶端均设有均匀分布的两个安装板(4),四个所述安装板(4)上均设有转向机构,所述转向机构包括转动安装在安装板(4)底部的第一传动轮(7),所述第一传动轮(7)的底部固定安装有固定板(5),所述固定板(5)上开设有两个对称设置的安装孔(9),所述固定板(5)的底部固定安装有位于其一安装孔(9)正下方的第二电机(14),所述第二电机(14)的输出轴贯穿其一安装孔(9)并固定安装有第二传动轮(8),所述第一传动轮(7)与第二传动轮(8)啮合连接。
2.根据权利要求1所述的一种无杆式电动牵引车的牵引装置,其特征在于,四个所述固定板(5)的底部均固定安装有安装座(6),四个所述安装座(6)均呈u型,四个所述安装座(6)上均转动安装有行走轮(10)。
3.根据权利要求2所述的一种无杆式电动牵引车的牵引装置,其特征在于,四个所述安装座(6)的一外侧壁上均固定安装有第一电机(11),四个所述第一电机(11)的输出轴均与相邻行走轮(10)的转轴固定连接。
4.根据权利要求1所述的一种无杆式电动牵引车的牵引装置,其特征在于,两个所述第一安装槽(2)内均设有两个第一电源(15),两两所述第一电源(15)均位于相邻两个安装板(4)之间,四个所述第一电源(15)均与相邻的第一电机(11)、第二电机(14)电连接。
5.根据权利要求1所述的一种无杆式电动牵引车的牵引装置,其特征在于,所述槽钢架(1)上开设有位于两个第一安装槽(2)之间的第二安装槽(18),所述第二安装槽(18)内设有控制器(16)。
6.根据权利要求5所述的一种无杆式电动牵引车的牵引装置,其特征在于,所述第二安装槽(18)内设有位于控制器(16)一侧的第二电源(17),所述第二电源(17)与控制器(16)电连接,所述控制器(16)与四个第一电源(15)、四个第一电机(11)、四个第二电机(14)电连接。
7.根据权利要求1所述的一种无杆式电动牵引车的牵引装置,其特征在于,所述槽钢架(1)的两内侧壁之间固定安装有同一加强筋(3),所述加强筋(3)采用工字钢材质。
8.根据权利要求1所述的一种无杆式电动牵引车的牵引装置,其特征在于,所述固定板(5)的顶部固定安装有垫块(13),所述垫块(13)的顶面与第一传动轮(7)的底面相贴。
9.根据权利要求3所述的一种无杆式电动牵引车的牵引装置,其特征在于,所述安装座(6)的另一外侧壁上固定安装有固定座(12),所述固定座(12)的中心处与行走轮(10)的转轴转动连接。
10.一种无杆式电动牵引车的牵引方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种无杆式电动牵引车的牵引装置,包括槽钢架,所述槽钢架呈U型,所述槽钢架上开设有对称设置的两个第一安装槽,两个所述第一安装槽的顶端均设有均匀分布的两个安装板,四个所述安装板上均设有转向机构,所述转向机构包括转动安装在安装板底部的第一传动轮,所述第一传动轮的底部固定安装有固定板,所述固定板上开设有两个对称设置的安装孔,所述固定板的底部固定安装有位于其一安装孔正下方的第二电机;本发明还公开了一种无杆式电动牵引车的牵引方法。本发明利用四轮驱动可以提供更大牵引力,能够牵引重量更大的飞机,四轮驱动能够使牵引车更加平稳的运动,遇到路面颠簸的情况也能避免脱钩的现象发生。
技术研发人员:赵景波,尹洪环,于鸿彬,赵翎辛
受保护的技术使用者:天津通野机械制造有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!