一种无人机群发射回收系统及其发射回收方法与流程
本发明属于舰载无人机,更具体地说,是涉及一种无人机群发射回收系统,本发明还涉及一种无人机群发射回收方法。
背景技术:
1、随着无人机技术不断进步与发展,人机逐渐被用于航母及其他水面舰艇上代替有人机执行危险任务。舰载无人机具有成本低、体积小、作战使用灵活、费效比高、可避免人员伤亡等特点,可执行预警、侦查、中继和攻击等任务。目前舰载无人机的发射方式主要包括气动、液压、橡皮筋、电磁弹射和火箭助推,回收方式主要着眼于缓冲吸能目标上,包括伞降回收、阻拦索钩回收和撞网回收。
2、然而,当今实现舰载无人机的发射和回收分别依靠两套独立的系统,重量大、体型大,占用舰船上较大的空间资源。而且在准备无人机发射和回收的过程中,需要协同作业人员多,操作步骤繁琐。
3、现有技术中有名称为“一种折叠翼无人机集群式发射回收系统”、公开号为“cn115675905a”的技术,该技术提供一种折叠翼无人机集群式发射回收系统,包括发射装置、张网装置和撤收装置;发射装置包括多个发射箱单元,各发射箱单元包括发射箱和设置在发射箱中的第一引导传动机构、适配架,适配架设置在引导传动机构上,第一引导传动机构可带动适配架伸出发射箱;适配架上设置有与无人机相匹配的定位导向机构;张网装置包括伸缩折叠张网机构和设置在其上的回收网、卷扬机构,回收网的四角通过绳索挂在卷扬机构上;撤收装置包括多自由度机械臂及设置在其末端的机械手,多自由度机械臂可带动机械手移动至发射箱和回收网,机械手用于抓取无人机。采用本发明的技术方案,能够在有限时间内高效地独立连续完成多架次无人机发射回收任务。该技术没有涉及本技术的技术问题和技术方案。
技术实现思路
1、本发明所要解决的技术问题是:针对现有技术的不足,提供一种结构简单,能够有效减少无人机发射和回收装置在舰艇上空间资源的占用,降低协同工作人员成本,仅需通过控制台就能实现发射回收过程,并且多种工作模式下能够自由控制无人机群发射和回收以满足不同任务需求,全面提升无人机发射回收性能的无人机群发射回收系统。
2、要解决以上所述的技术问题,本发明采取的技术方案为:
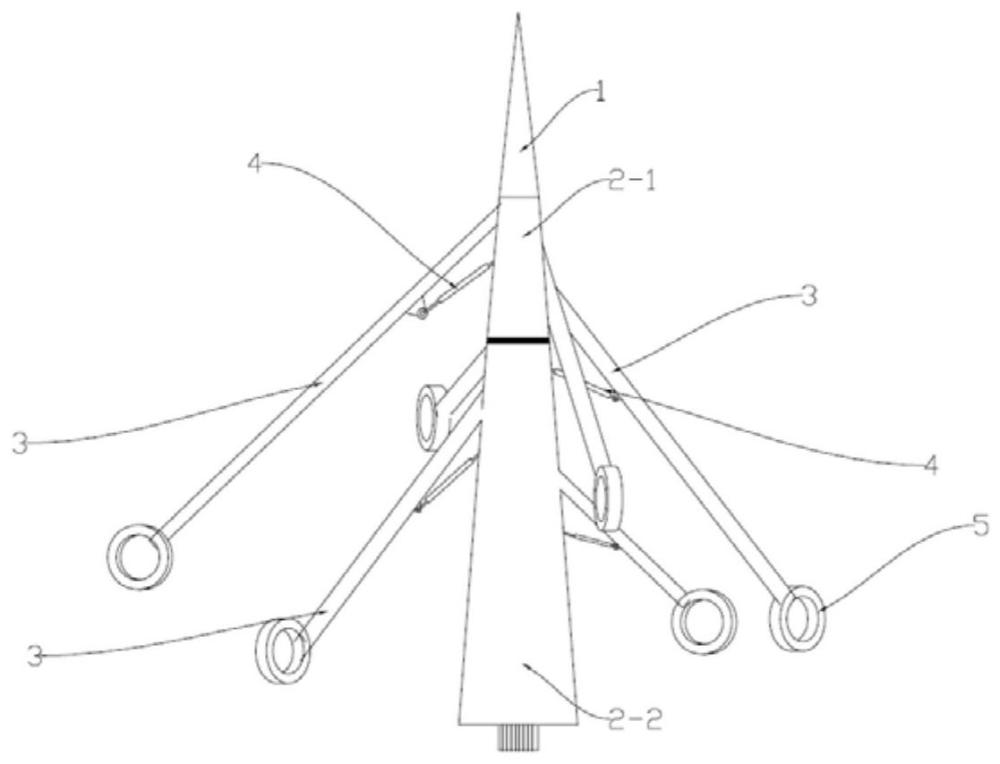
3、本发明为一种无人机群发射回收系统,包括一号转动层和二号转动层,一号转动层通过一号连接件连接一号电机,二号转动层通过二号连接件连接二号电机,一号电机和二号电机连接在安装基座上,安装基座位于无人机群发射回收系统底部,一号转动层外侧活动铰接多个支臂,一号转动层和每个支臂之间连接液压伸缩机构,二号转动层外侧活动铰接多个支臂,二号转动层和每个支臂之间连接伸缩机构,每个支臂下端设置收放机构,收放机构包括固定夹紧机构和活动夹紧机构,固定夹紧机构固定连接支臂,活动夹紧机构活动连接支臂,活动夹紧机构和支臂之间通过固定机构伸缩机构连接。
4、所述的一号转动层固定连接一号转动层杆件,一号转动层杆件活动套装通过二号转动层管件,一号转动层杆件上设置一号连接件第一齿轮,一号连接件第一齿轮连接一号连接件第二齿轮,一号连接件第二齿轮连接第一电机,二号转动层管件上设置二号连接件第一齿轮,二号连接件第一齿轮连接二号连接件第二齿轮,二号连接件第二齿轮连接第二电机,第一电机和第二电机设置为对称布置的结构。
5、所述的一号转动层上设置一号转速传感器,二号转动层上设置二号转速传感器,一号转速传感器和二号转速传感器分别连接发射回收系统控制站;每个支臂上分别设置高度传感器和角度传感器,每个支臂上的高度传感器和角度传感器分别连接发射回收系统控制站。
6、所述的一号转动层位于二号转动层上方位置,一号转动层和二号转动层之间设置中间环。
7、所述的一号转动层杆件上端设置天线,天线连接无人机控制台和发射回收系统控制站。
8、每个支臂下端的收放机构的电动伸缩机构分别连接发射回收系统控制站,转动电机连接发射回收系统控制站。
9、所述的一号转动层和每个支臂之间的伸缩机构分别连接发射回收系统控制站,二号转动层和每个支臂之间的伸缩机构分别连接发射回收系统控制站。
10、所述的无人机群发射回收系统包括六种工作模式,分别是:
11、工作模式一:一号转动层实现高空轨道的无人机发射;二号转动层平衡扭矩;
12、工作模式二:二号转动层实现低空轨道的无人机发射;一号转动层平衡扭矩;
13、工作模式三:一号转动层实现高空轨道的无人机发射;二号转动层实现低空轨道的无人机回收;
14、工作模式四:一号转动层实现高空轨道的无人机回收;二号转动层实现低空轨道的无人机发射;
15、工作模式五:一号转动层、二号转动层同时实现无人机发射;
16、工作模式六:一号转动层、二号转动层同时实现无人机回收。
17、所述的无人机群发射回收系统在不同工作模式下工作时:
18、工作模式一:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转保证扭矩平衡;旋转速度满足无人机发射速度时,一号转动层所在支臂末端的收放机构发射无人机群;
19、工作模式二:二号转动层展开支臂顺时针旋转,一号转动层展开支臂逆时针旋转保证扭矩平衡;旋转速度满足无人机发射速度时,二号转动层所在支臂末端的收放机构发射无人机群;
20、工作模式三:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转;旋转速度满足无人机设定速度时,一号转动层所在支臂末端的收放机构发射无人机群;二号转动层所在支臂末端的收放机构回收无人机群。
21、所述的无人机群发射回收系统在不同工作模式下工作时:
22、工作模式四:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转;旋转速度满足无人机设定速度时,二号转动层所在支臂末端的收放机构发射无人机群;一号转动层所在支臂末端的收放机构回收无人机群
23、工作模式五:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转保证扭矩平衡;旋转速度满足无人机发射速度时,一号转动层、二号转动层所在支臂末端的收放机构发射无人机群。
24、工作模式六:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转保证扭矩平衡;旋转速度满足无人机回收速度时,一号转动层、二号转动层所在支臂末端的收放机构回收无人机群。
25、本发明还涉及一种步骤简单,能够有效减少无人机发射和回收装置在舰艇上空间资源的占用,降低协同工作人员成本,仅需通过控制台就能实现发射回收过程,多种工作模式下能够自由控制无人机群发射和回收以满足不同任务需求,全面提升无人机发射回收性能的无人机群发射回收方法,所述的无人机群发射回收方法的发射回收步骤为:
26、所述的无人机群发射回收系统包括六种工作模式:
27、工作模式一:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转保证扭矩平衡;旋转速度满足无人机发射速度时,一号转动层所在支臂末端的收放机构发射无人机群;
28、工作模式二:二号转动层展开支臂顺时针旋转,一号转动层展开支臂逆时针旋转保证扭矩平衡;旋转速度满足无人机发射速度时,二号转动层所在支臂末端的收放机构发射无人机群;
29、工作模式三:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转;旋转速度满足无人机设定速度时,一号转动层所在支臂末端的收放机构发射无人机群;二号转动层所在支臂末端的收放机构回收无人机群;
30、工作模式四:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转;旋转速度满足无人机设定速度时,二号转动层所在支臂末端的收放机构发射无人机群;一号转动层所在支臂末端的收放机构回收无人机群;
31、工作模式五:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转保证扭矩平衡;旋转速度满足无人机发射速度时,一号转动层、二号转动层所在支臂末端的收放机构发射无人机群;
32、工作模式六:一号转动层展开支臂逆时针旋转,二号转动层展开支臂顺时针旋转保证扭矩平衡;旋转速度满足无人机回收速度时,一号转动层、二号转动层所在支臂末端的收放机构回收无人机群。
33、采用本发明的技术方案,工作原理及有益效果如下所述:
34、本发明所述的无人机群发射回收系统,结构设置时,设置一号转动层和二号转动层。一号转动层通过一号电机实现驱动,二号转动层通过二号电机实现驱动。一号转动层和每个支臂之间连接伸缩机构,二号转动层和每个支臂之间连接伸缩机构,通过每个伸缩机构实现对应的支臂相对于对应的转动层的夹角的变化,即实现支臂张开角度的调节。收放机构方面,通过固定机构伸缩机构的伸缩控制,实现活动夹紧机构相对于固定夹紧机构张开和合拢,张开时便于收放机构放出无人机,无人机收回后,合拢实现无人机的收回锁止在位。本发明的发射回收系统,具备以下六种工作模式,分别是:工作模式一:一号转动层实现高空轨道的无人机发射;二号转动层平衡扭矩;工作模式二:二号转动层实现低空轨道的无人机发射;一号转动层平衡扭矩;工作模式三:一号转动层实现高空轨道的无人机发射;二号转动层实现低空轨道的无人机回收;工作模式四:一号转动层实现高空轨道的无人机回收;二号转动层实现低空轨道的无人机发射;工作模式五:一号转动层、二号转动层同时实现无人机发射;工作模式六:一号转动层、二号转动层同时实现无人机回收。有效满足不同情形下的需求。
- 还没有人留言评论。精彩留言会获得点赞!