一种微小SAR卫星大斜视成像的在轨控制方法与流程
本发明涉及一种微小sar卫星大斜视成像的在轨控制方法,属于微小sar卫星总体设计领域。
背景技术:
1、随着星载合成孔径雷达(synthetic aperture radar,sar)技术的不断发展和多角度成像应用需求的不断提升,对具有提前观测或回头观测功能的大斜视sar成像的需求越来越迫切。
2、大斜视成像需要方位向波束与飞行方向成一个较大的角度(称为斜视角),可通过sar天线电扫描或者卫星姿态机动实现。考虑到实际场景的应用价值,斜视角通常可达到几十度,若仅采用sar天线电扫描的方法实现,将极大增加sar天线尺寸和tr组件规模,进而使得卫星的重量和规模成倍增加。
3、因此如何在卫星重量和规模不变的前提下,有效开展微小sar卫星大斜视在轨成像是本发明重点解决的问题。
技术实现思路
1、本发明解决的技术问题是:针对目前现有技术中,传统大斜视成像导致sar天线及卫星重量和规模成倍增加的问题,提出了一种微小sar卫星大斜视成像的在轨控制方法。
2、本发明解决上述技术问题是通过如下技术方案予以实现的:
3、一种微小sar卫星大斜视成像的在轨控制方法,包括:
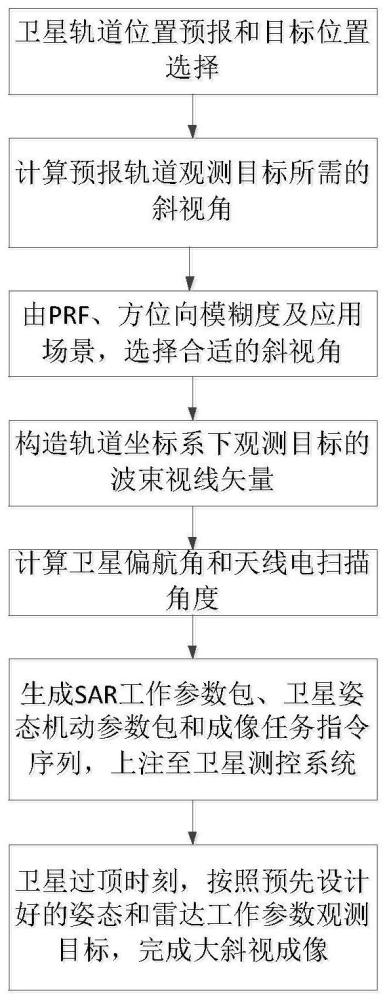
4、通过轨道预报确定预设时间范围内卫星轨道六根数,并根据卫星覆盖范围选取待观测目标;
5、计算预设时间范围内惯性坐标系下的卫星位置参数和速度参数,根据待观测目标的目标位置计算当前时段内卫星观测待观测目标所需的斜视角;
6、根据雷达接收机的脉冲重复频率范围、sar图像方位向模糊度及卫星成像任务需求,选取所需的卫星位置参数及速度参数,同时确定对应的斜视角;
7、于地固坐标系下构造待观测目标的波束视线矢量,并转换至轨道坐标系下波束视线矢量;
8、确定卫星姿态转序,根据轨道坐标系下波束视线矢量计算地面斜视角及下视角,根据星地几何关系计算卫星偏航角及和sar天线电扫描角度;
9、根据斜视角、sar天线电扫描角度设计sar工作参数,生成sar工作参数包;同时生成卫星姿态机动参数包,与sar工作参数共同上注卫星;
10、按照预设卫星姿态及雷达工作参数,对待观测目标进行大斜视成像,将雷达回波数据、导航数据和星历数据下传至地面数据传输站。
11、所述待观测目标于已知的地面目标库中选择,选取待观测目标后,于地固坐标系中确定待观测目标的目标位置ptecef;预设时间范围为[-t0,t0]时段内。
12、计算当前时段内卫星观测待观测目标所需的斜视角θsq的步骤为:
13、根据轨道六根数计算惯性坐标系下的卫星的位置参数为pseci、速度参数为vseci;
14、根据卫星的位置参数为psecef、速度参数为vsecef构造惯性坐标系至地固坐标系的转换矩阵,将惯性坐标系下卫星位置pseci和速度vseci转换至地固坐标系下卫星位置参数psecef和速度参数vsecef;
15、计算目标斜距r、多普勒中心频率fdc,并根据所得数据计算当前时段内卫星观测待观测目标所需的斜视角。
16、所述惯性坐标系下的卫星的位置参数为pseci、速度参数为vseci的计算方法为:
17、
18、
19、式中,a为轨道半长轴,e为偏心率,i为轨道倾角,ω为升交点赤经,ω为近地点幅角,u为纬度幅角,ωs为卫星角速度,ve为地球自转角速度;
20、rs为卫星距离地心距离:
21、
22、为卫星距离地球距离的变化率:
23、
24、所述卫星位置参数psecef和速度参数vsecef计算方法为:
25、
26、
27、式中,εgst为格林尼治恒星时,η为岁差、章动和极移修正矩阵。
28、所述目标斜距计算方法为:
29、r=|ptecef-psecef|
30、所述多普勒中心频率fdc计算方法为:
31、fdc=2/(λr)×dot(vsecef,psecef-ptecef)式中,λ为雷达波长,dot表示向量点积;
32、当前时段内卫星观测待观测目标所需的斜视角θsq的计算方法为:
33、
34、所述轨道坐标系下波束视线矢量的构造方法为:
35、构造地固坐标系下波束视线矢量αecef=psecef-ptecef;
36、构造地固坐标系至轨道坐标系的转换矩阵;
37、进行轨道坐标系下波束视线矢量的转换:
38、
39、式中,αo为轨道坐标系下波束视线矢量。
40、所述地面斜视角、下视角的计算方法为:
41、
42、
43、式中,γ1、γ2、γ3分别是波束视线矢量在轨道坐标系下的三轴投影。
44、所述星地几何关系根据卫星飞行方向和sar天线的安装方式确定,确定星地几何关系后,确定初始卫星偏航角为:
45、
46、sar天线电扫描角度的确定方法为:
47、cos(γ)=cos(θsq)cos(γ0)
48、γ0=acos(cos(γ)/cos(θsq))
49、θ=acos(cos(γ)/cos(θsq))-εroll
50、式中,εroll是观测目标时卫星绕滚动轴转动的角度。
51、大斜视成像过程中,若卫星采用二维偏航导引模式,则对预设卫星姿态进行修正,确定修正后偏航角εyaw和俯仰角εpitch:
52、
53、
54、本发明与现有技术相比的优点在于:
55、本发明提供的一种微小sar卫星大斜视成像的在轨控制方法,首次提出了采用卫星姿态机动和天线电扫描相结合的sar卫星大斜视成像的实施方法,采用偏航角和滚动角的姿态机动实现大斜视角,有效降低了距离向和方位向的深度耦合,简化地面成像处理的复杂度,通过波束视线矢量的设计能够有效将大斜视角拆分至卫星姿态控制和sar载荷分系统,流程清晰、易于工程实践。
技术特征:
1.一种微小sar卫星大斜视成像的在轨控制方法,其特征在于包括:
2.根据权利要求1所述的一种微小sar卫星大斜视成像的在轨控制方法,其特征在于:
3.根据权利要求2所述的一种微小sar卫星大斜视成像的在轨控制方法,其特征在于:
4.根据权利要求3所述的一种微小sar卫星大斜视成像的在轨控制方法,其特征在于:
5.根据权利要求4所述的一种微小sar卫星大斜视成像的在轨控制方法,其特征在于:
6.根据权利要求5所述的一种微小sar卫星大斜视成像的在轨控制方法,其特征在于:
7.根据权利要求6所述的一种微小sar卫星大斜视成像的在轨控制方法,其特征在于:
8.根据权利要求7所述的一种微小sar卫星大斜视成像的在轨控制方法,其特征在于:
9.根据权利要求8所述的一种微小sar卫星大斜视成像的在轨控制方法,其特征在于:
10.根据权利要求9所述的一种微小sar卫星大斜视成像的在轨控制方法,其特征在于:
技术总结
一种微小SAR卫星大斜视成像的在轨控制方法,采用STK软件进行轨道预报和目标覆盖范围仿真,从地面运控系统目标库中选择待观测目标;根据预报的轨道六根数和目标位置,计算观测目标所需要斜视角;根据雷达接收机可实现的脉冲重复频率范围、SAR图像方位向模糊度以及场景应用需求,选择合适的斜视角;获取轨道坐标系下观测目标的波束视线矢量;确定卫星姿态转序,根据大斜视成像的星地几何关系计算地面斜视角、下视角、卫星偏航角和SAR天线电扫描角度;由地面测控系统生成SAR工作参数包、卫星姿态机动参数包和成像任务指令序列并上注至卫星测控系统。
技术研发人员:郭鑫,施思寒,姚雨迎,郗晓菲,俞雷,张薇,车晓玲
受保护的技术使用者:航天东方红卫星有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!