一种无人机空中回收装置和方法与流程
本发明涉及无人机系统,尤其涉及一种可进行空中回收的无人机及母机上的回收装置和回收方法,用于无人机进行空中快速回收。
背景技术:
1、无人机技术经过近几年的迅猛发展,已经深入国民生产生活和军事的各个领域。其中,军用小型无人机因使用灵活、成本低、费效比高等优点,广泛应用于侦察监视、搜索巡逻和打击等领域。但是筒射型及空投型小型无人机尤其百公斤以上高速无人机一般采用伞降回收或撞网回收,在使用方面受到多方面的限制。
2、以现有的一种小无人机为例,采用空中回收方式,在回收时母机释放类似加油锥套的对接锥套,无人机伸出对接杆与母机的对接锥套实现对接并锁定,母机回收对接锥套牵引无人机至母机尾部,母机释放机械手臂对无人机进行回收。但该方案的过程中,需要无人机有很高的图像识别及位置、姿态控制精度与母机锥套对接,母机尾部向后伸出机械手臂捕捉小无人机,机械机构复杂,控制精度要求也高。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术不足,提供一种无人机空中回收装置及方法。
2、为了解决上述技术问题,本发明公开了一种无人机空中回收装置及方法,本发明的技术方案如下:
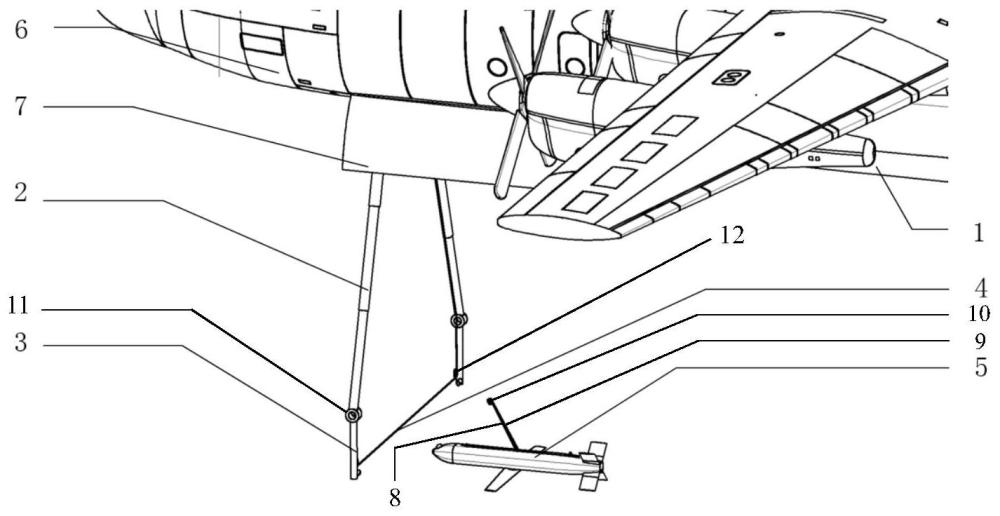
3、一种无人机空中回收装置,包括母机、回收支架、回收绳和子机。所述回收支架活动设置于母机的机身内。所述回收绳与所述回收支架连接。所述子机与回收绳连接后能够回收进入母机。
4、进一步的,母机是采用运输机或轰炸机用于投放和回收子机,在母机机身下部开设两侧打开的舱门,舱门打开后,回收支架可伸出舱门。
5、进一步的,回收支架包括伸缩机构,伸缩机构拥有较高的强度,分为两个分支,每个分支由两个以上的分段组成,分段之间采用液压或电动方式伸出或缩回,两个分支伸出机身后呈八字形,以便给子机留足对接空间。
6、进一步的,在伸缩机构上每个分段均有回收绳的固定卡扣,使回收绳在子机回收前与伸缩机构固定约束。所述固定卡扣位于伸缩机构的各分段的末端,由卡扣和滚轮组成,保证回收绳固定在伸缩机构的同时可自由伸长。当伸缩机构处于缩回状态时,各分段末端的固定卡扣相邻排列在一起,各分段处于非完全收缩状态。
7、进一步的,回收支架包括外伸杆,外伸杆在伸缩机构末端,外伸杆上安装外伸杆滑轮和外伸杆固定卡扣,使回收绳固定在外伸杆末端,并保证回收绳可自由伸长。
8、进一步的,回收绳采用高模量材料制作,包括但不限于凯夫拉。优选凯夫拉材料,既可承受无人机撞击的强度,又具有可自由伸长的柔性。所述回收绳由回收绳控制电机驱动伸长及收回。所述回收绳控制电机上安装有压力传感器。
9、进一步的,子机为下单翼布局,子机机身上部设有两根能够竖起和放下的对接撞杆,并完成锁定。所述对接撞杆包括第一对接撞杆和第二对接撞杆,所述第一对接撞杆和第二对接撞杆分别由独立的电机控制竖起或放下。所述对接撞杆末端具有锁扣,所述锁扣能够与所述回收绳扣接。
10、进一步的,子机上安装视觉识别装置,用于识别母机的外伸杆和回收绳,便于子机与母机的对接和回收。
11、使用上述装置进行无人机空中回收的的方法,所述的回收方法包括以下步骤:
12、步骤1:母机的回收支架携带回收绳伸出后,母机进入回收作业状态。
13、步骤2:子机速度调整至母机相近,并在母机后方飞行,子机上的视觉识别系统识别母机上的伸缩机构和回收绳,将自身调整至回收绳后方航线上。
14、步骤3:子机升起第一对接撞杆和第二对接撞杆,对接撞杆末端的锁扣均处于自由封闭状态。第一对接撞杆和第二对接撞杆以同一方向抵近回收绳,即两根对接撞杆的末端的锁扣之间形成的连线与外伸杆末端之间回收绳接近或者完全平行。对接撞杆末端的锁扣受到回收绳的压力,形成活动开口,使回收绳落入锁扣内,当外伸杆末端固定卡扣处的回收绳滑入子机的对接撞杆末端锁扣内时,母机回收绳电机处的传感器输出信号瞬增,即母机感受到回收绳上拉力瞬增,收回回收支架,使回收绳处于自由伸出状态。
15、步骤4:第一对接撞杆电机控制第一对接撞杆向子机前方折叠,第二对接撞杆电机控制第二对接撞杆向子机后方折叠,收回子机机身上方凹槽内并锁定。
16、步骤5:母机回卷回收绳,子机将机翼折叠回机身下方,子机跟随回收绳一并收入母机舱内,并闭合舱盖,完成回收。
17、有益效果:
18、(1)与现有技术中筒射型及空投型小型无人机采用伞降回收或撞网回收方式相比,本发明方案中的母机回收结构不仅结构简单,重量轻,而且该方式能保证子机完好无损,子机再次使用无需进行整机零部件状态检查和更换易损件,大大降低了维保成本;
19、(2)本发明的方案减少子机的对接精度要求并同时降低母机回收机构复杂性;
20、(3)本发明的方案可使子机拥有更宽的纵向和横向对接误差,母机采用绳索和绞盘方式回收子机,使结构更加简化。
技术特征:
1.一种无人机空中回收装置,其特征在于,包括母机(1)、回收支架、回收绳(4)和子机(5);
2.根据权利要求1所述的装置,其特征在于,在母机机身(6)下部开设舱门(7),舱门(7)打开后,回收支架可伸出舱门(7)。
3.根据权利要求1所述的装置,其特征在于,回收支架包括伸缩机构(2)。
4.根据权利要求3所述的装置,其特征在于,所述的伸缩机构(2)分为两个分支,每个分支由两个以上的分段组成,分段之间采用液压或电动方式伸出或缩回,两个分支伸出机身后呈八字形。
5.根据权利要求4所述的装置,其特征在于,所述的伸缩机构(2)上每个分段均有回收绳(4)的固定卡扣(12),使回收绳(4)在子机(5)回收前与伸缩机构(2)固定约束。
6.根据权利要求1或3所述的装置,其特征在于,所述的回收支架包括外伸杆(3),外伸杆(3)在伸缩机构(2)末端,外伸杆(3)上安装外伸杆滑轮(11)和固定卡扣(12),使回收绳(4)固定在外伸杆(3)末端,并保证回收绳(4)可自由伸长。
7.根据权利要求1所述的装置,其特征在于,所述的回收绳(4)采用高模量材料制作,所述高模量材料为凯夫拉材料,既可承受无人机撞击的强度,又具有可自由伸长的柔性。
8.根据权利要求1所述的装置,其特征在于,所述的子机(5)的机身上部设有两根能够竖起和放下的对接撞杆,对接撞杆末端具有锁扣,所述锁扣能够与所述回收绳扣接。
9.根据权利要求1所述的装置,其特征在于,子机(5)上安装视觉识别装置,用于识别母机(1)的外伸杆(3)和回收绳(4),便于子机(5)与母机(1)的对接和回收。
10.使用权利要求1所述装置进行无人机空中回收的的方法,其特征在于,所述的回收方法包括以下步骤:
技术总结
本发明提供了一种可进行空中回收无人机的回收装置及方法,该装置包括母机、回收支架、回收绳和子机。在母机机身前下部开设两侧打开的舱门,舱门打开后,伸缩机构伸出后呈八字形,以便给子机留足对接空间。回收支架包括伸缩机构和外伸杆,外伸杆上安装滑轮和卡扣,使回收绳固定在外伸杆末端,并保证回收绳可自由伸长。子机机身上部有能够竖起和放下的对接撞杆,可完成锁定。子机上安装视觉识别装置,用于识别母机的外伸杆和回收绳,便于子机与母机的对接和回收。本发明的回收结构不仅结构简单,重量轻,而且该方法能保证子机完好无损,使子机拥有更宽的纵向和横向对接误差,减少子机的对接精度要求并同时降低母机回收机构复杂性。
技术研发人员:汪国栋,杜聪聪,万峻麟,商枝江,姚琪,程文杰,蔡亮,张东方,陈韦杰,雷良超
受保护的技术使用者:中电莱斯信息系统有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!