一种多机协同作业的智能机巢的制作方法
本发明涉及智能机巢,具体是指一种多机协同作业的智能机巢。
背景技术:
1、智能机巢是无人机远程起降平台,是无人机稳固的“家”,智能机巢是无人机远程起降平台,是无人机稳固的“家”,无人机在进行降落时的冲击力较大,但是现有的无人机机巢上并不具备一些可以对无机降落时的冲击力进行缓冲的相关组件,即使升降台的材料性能够好,但是长此以往,升降台还是会受到一定的损伤,从而给无人机的升降带来一定影响,且当架无人机起降时会受到机巢开口尺寸影响,可能会发生磕碰而无法稳定降落至机巢内。
技术实现思路
1、为了解决上述的各种问题,本发明提供一种多机协同作业的智能机巢,所述装置设有若干个机巢通过液压杆连接于机箱内,通过控制液压杆升高可以使机巢中的减震机构升高,进而带动防护机构上升,所述防护机构升高后向外则转动贴合于壳体的倒角面,通过防护机构上的防护板进而达到扩大无人机降落缓冲面积,促进无人机稳定降落至机巢中,且通过减震机构进一步促进无人机降落的稳定性。
2、为实现上述目的,本发明提供的技术方案为:
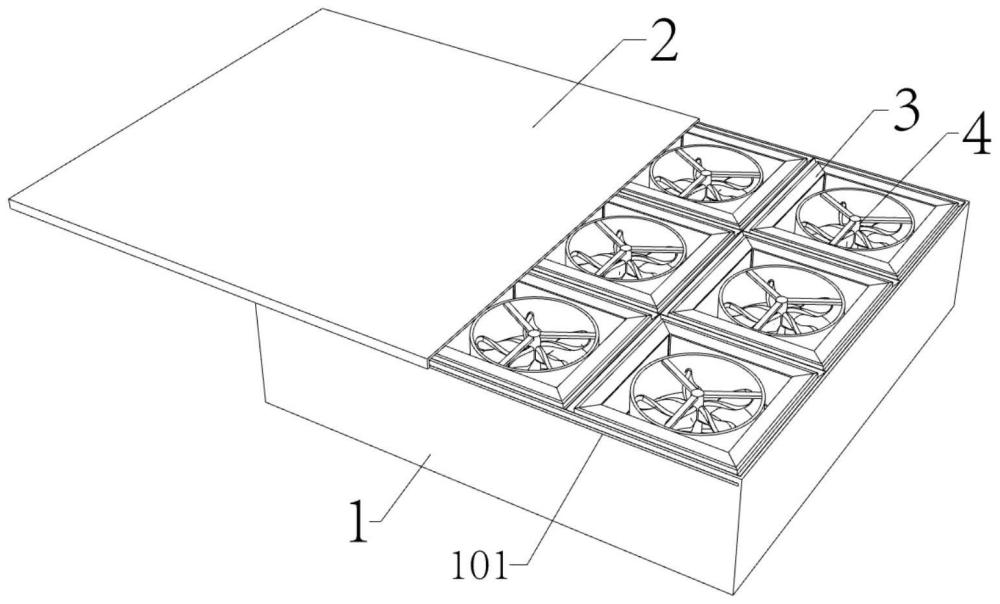
3、一种多机协同作业的智能机巢,包括无人机,还包括机箱、箱盖、液压杆和机巢,所述箱盖滑动连接于机箱,所述机巢设有若干个,若干个所述机巢整列排布设于机箱内,所述无人机设于机巢内,所述机巢包括壳体、减震机构和防护机构,所述减震机构包括连接板、第一阻尼器和支撑板,所述液压杆下端设为液压管,所述液压管固接于机箱内壁底端,所述壳体固接于液压管上端,所述液压杆上端设为支撑杆,所述支撑杆液压滑动连接于液压管,所述支撑杆滑动伸入壳体内,所述连接板固接于支撑杆,所述第一阻尼器固接于连接板上端,所述支撑板固接于第一阻尼器上端,所述防护机构的数量设有四个,四个所述防护机构转动连接于支撑板上端。
4、进一步的,所述箱盖一侧设为连接口,所述连接口两侧的箱盖内壁固接有滑块,所述机箱两侧设有滑轨,所述滑块滑动适配于滑轨。
5、进一步的,所述第一阻尼器的数量设有四个,四个所述第一阻尼器成矩形排布于连接板和支撑板之间。
6、进一步的,所述防护机构包括底板、连接壳、第二阻尼器和防护板,所述支撑板上端每一边均对称固接有两个连接件,所述底板下端对称设有两个连接槽,所述连接槽内均固接有连接轴,所述连接轴铰接于连接件,所述连接壳固接于底板,所述连接壳一侧设有安装槽,所述第二阻尼器固接于安装槽内壁,所述防护板滑动设于安装槽内,所述防护板固接于第二阻尼器。
7、进一步的,所述第二阻尼器的数量设有若干个。
8、进一步的,所述底板和连接壳的横切面均设为梯形,所述底板和连接壳的侧边相互贴合。
9、进一步的,所述壳体上端内边均设有倒角,所述壳体上端内壁倒角面用于对底板进行适配限位。
10、采用上述结构本发明取得的有益效果如下:
11、本发明实施例中设有若干个机巢,所述若干个机巢均通过液压杆连接于机箱内,可以实现多架次无人机的起降,机巢内设有减震机构和防护机构,通过控制液压杆可以控制减震机构的升降,所述减震机构中支撑板升起后可以控制无人机的起降,所述减震机构升起后带动防护机构升起至壳体上端倒角面,所述防护机构没有了壳体内壁的限位后转动贴合于倒角面,进而扩大了无人机起降的防护面积,所述防护机构中通过第二阻尼器连接防护板对无人机的起降进行防护,可以避免直接降落至壳体内与内壁的磕碰。
技术特征:
1.一种多机协同作业的智能机巢,包括无人机,其特征在于:还包括机箱、箱盖、液压杆和机巢,所述箱盖滑动连接于机箱,所述机巢设有若干个,若干个所述机巢整列排布设于机箱内,所述无人机设于机巢内,所述机巢包括壳体、减震机构和防护机构,所述减震机构包括连接板、第一阻尼器和支撑板,所述液压杆下端设为液压管,所述液压管固接于机箱内壁底端,所述壳体固接于液压管上端,所述液压杆上端设为支撑杆,所述支撑杆液压滑动连接于液压管,所述支撑杆滑动伸入壳体内,所述连接板固接于支撑杆,所述第一阻尼器固接于连接板上端,所述支撑板固接于第一阻尼器上端,所述防护机构的数量设有四个,四个所述防护机构转动连接于支撑板上端。
2.根据权利要求1所述的一种多机协同作业的智能机巢,其特征在于:所述箱盖一侧设为连接口,所述连接口两侧的箱盖内壁固接有滑块,所述机箱两侧设有滑轨,所述滑块滑动适配于滑轨。
3.根据权利要求1所述的一种多机协同作业的智能机巢,其特征在于:所述第一阻尼器的数量设有四个,四个所述第一阻尼器成矩形排布于连接板和支撑板之间。
4.根据权利要求1所述的一种多机协同作业的智能机巢,其特征在于:所述防护机构包括底板、连接壳、第二阻尼器和防护板,所述支撑板上端每一边均对称固接有两个连接件,所述底板下端对称设有两个连接槽,所述连接槽内均固接有连接轴,所述连接轴铰接于连接件,所述连接壳固接于底板,所述连接壳一侧设有安装槽,所述第二阻尼器固接于安装槽内壁,所述防护板滑动设于安装槽内,所述防护板固接于第二阻尼器。
5.根据权利要求4所述的一种多机协同作业的智能机巢,其特征在于:所述第二阻尼器的数量设有若干个。
6.根据权利要求4所述的一种多机协同作业的智能机巢,其特征在于:所述底板和连接壳的横切面均设为梯形,所述底板和连接壳的侧边相互贴合。
7.根据权利要求1所述的一种多机协同作业的智能机巢,其特征在于:所述壳体上端内边均设有倒角,所述壳体上端内壁倒角面用于对底板进行适配限位。
技术总结
本发明公开了在智能机巢技术领域的一种多机协同作业的智能机巢,包括无人机,还包括机箱、箱盖、液压杆和机巢,所述箱盖滑动连接于机箱,所述所述机巢设有若干个,若干个所述机巢整列排布设于机箱内,所述液压杆两端分别连接于机箱和机巢,所述无人机设于机巢内。本发明的优点:本发明实施例中设有若干个机巢通过液压杆连接于机箱内,通过控制液压杆升高可以使机巢中的减震机构升高,进而带动防护机构上升,所述防护机构升高后向外则转动贴合于壳体的倒角面,通过防护机构上的防护板进而达到扩大无人机降落缓冲面积,促进无人机稳定降落至机巢中,且通过减震机构进一步促进无人机降落的稳定性。
技术研发人员:韩丽丽,陈旭东,黄雅莉,葛康,肖英豪,薛保国,马留洋
受保护的技术使用者:广东电网有限责任公司广州供电局
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!