一种任意轴向姿态机动递阶饱和角速度限幅方法与流程
本发明涉及卫星姿态控制,特别涉及一种任意轴向姿态机动递阶饱和角速度限幅方法。
背景技术:
1、欧拉旋转定理指出,通过围绕固定于本体系和惯性系中的某个轴旋转刚体,刚体的姿态可以由任意给定指向改变为任意其他指向。该旋转轴称为欧拉轴,其方向在本体系和惯性系中都保持不变。与传统的根据一定转序绕本体轴依次旋转的机动模式相比,卫星姿态机动时绕欧拉轴进行旋转,能够实现三轴姿态在空间按“最短路径”向目标运动,大大减少机动时间。
2、递阶饱和pid控制律通过在传统pid控制算法的基础上对偏差姿态角和输出力矩等环节施加合适的饱和限幅处理,以满足执行机构输出力矩和角动量范围有限的客观约束。在单轴机动控制过程中,无需通过提前规划机动过程,就可以实现近似于时间最优的动态性能,非常适用于多模式任意轴向频繁机动任务。
3、对传统机动模式单一的卫星而言,应用递阶饱和控制算法过程中,针对特定的机动轴(也即上述欧拉轴)完成控制参数与限幅值设计就能实现需要的机动功能。新一代多模式复杂机动任务卫星通常需要具备空间任意轴向(即任意欧拉轴方向)机动能力,机动轴向根据不同模式或任务不断变化,无法提前进行参数设计,使用固有参数将导致角速度限幅与设计值不匹配,可能引起执行机构角动量饱和,对机动过程带来严重影响。
4、面向新的机动模式与控制要求,需要设计出能够适应空间任意轴向姿态机动,且工程可实现的递阶饱和角速度限幅控制方法。
技术实现思路
1、本发明的目的是提供一种任意轴向姿态机动递阶饱和角速度限幅方法,在对卫星体轴方向进行常规递阶饱和控制参数设计的基础上,将空间任意欧拉轴方向投影到卫星的三个体轴方向上,通过空间几何转换,计算空间任意欧拉轴方向的姿态偏差限幅值,实现任意欧拉轴方向的角速度限幅。本发明能够充分利用执行机构角动量空间,并有效避免各体轴方向控制带宽与阻尼比设计不一致时,空间不同轴向机动动态特性不一致的问题。
2、为了达到上述目的,本发明提供一种任意轴向姿态机动递阶饱和角速度限幅方法,包含步骤:
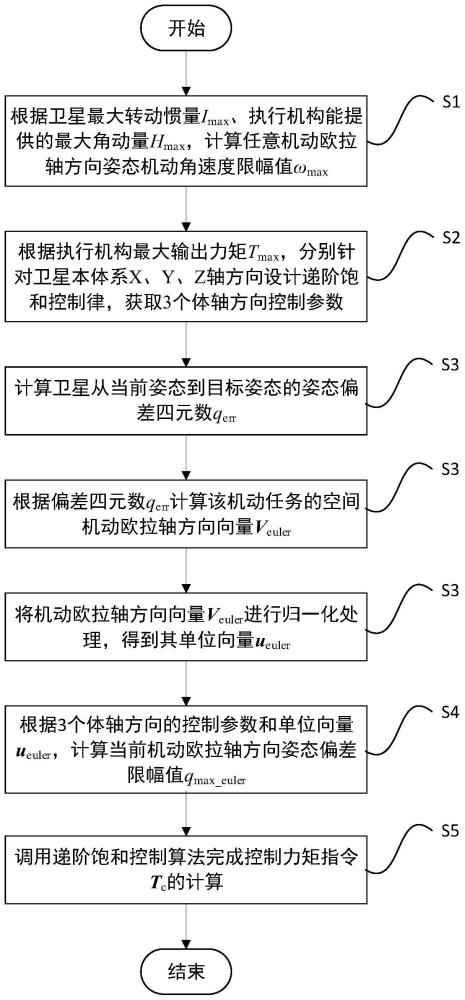
3、s1、基于卫星最大转动惯量imax和执行机构能够提供的最大角动量hmax,获得任意机动欧拉轴方向姿态机动角速度限幅值ωmax;
4、s2、基于执行机构能够提供的最大控制力矩tmax和所述角速度限幅值ωmax,分别针对卫星本体系三个体轴方向设计递阶饱和控制律,获取所述三个体轴方向的用于在轨机动任务的控制参数;
5、s3、计算卫星从当前姿态到目标姿态的姿态偏差四元数qerr,根据所述姿态偏差四元数qerr计算当前空间机动欧拉轴方向向量veuler;对所述空间机动欧拉轴方向向量veuler进行归一化处理,得到空间机动欧拉轴方向单位向量ueuler;
6、s4、根据三个体轴方向的所述控制参数与所述空间机动欧拉轴方向单位向量ueuler,计算当前机动欧拉轴方向姿态偏差限幅值qmax_euler;
7、s5、基于递阶饱和算法,计算当前机动欧拉轴方向姿态机动的控制力矩指令tc;通过所述控制力矩指令tc实现当前机动欧拉轴方向的姿态机动角速度不超过所述限幅值ωmax。
8、可选的,步骤s1中:
9、所述角速度限幅值
10、k为小于等于1的系数,符号“·”表示乘法。
11、可选的,步骤s2中所述递阶饱和控制律为:
12、
13、其中:i=x,y,z,表示卫星本体系体轴方向;tci为i轴方向的控制力矩指令,kpi、kii、kdi为i轴方向的所述控制参数,qei、ωei、qmaxi分别为i轴方向的控制姿态误差、控制角速度误差、姿态偏差限幅值,qmaxi计算方式为:
14、
15、sat函数为饱和函数,对于任意向量a和限幅值b,sat函数定义为:
16、
17、可选的,步骤s3包括:
18、s31、计算卫星从当前姿态到目标姿态的姿态偏差四元数qerr,
19、
20、q0、qmb分别为当前姿态、目标姿态的四元数;
21、s32、根据所述姿态偏差四元数qerr计算当前空间机动欧拉轴方向向量veuler;
22、
23、其中,sign(·)为符号函数,qerr(0)为所述姿态偏差四元数qerr的标部,qerr(1)、qerr(2)、qerr(3)为所述姿态偏差四元数qerr的矢部。
24、s33、对所述空间机动欧拉轴方向向量veuler进行归一化处理,得到空间机动欧拉轴方向单位向量ueuler;
25、
26、其中,||·||表示向量模长计算。
27、可选的,步骤s4包括:
28、s41、在卫星本体坐标系oxbybzb内,遍历空间全部机动欧拉轴向,则欧拉轴方向姿态偏差限幅值qmax_euler在空间形成一个椭球面,在坐标系oxbybzb内该椭球面的方程为
29、
30、其中:(x,y,z)为所述椭球面上任一点的坐标;
31、
32、其中,α∈[0,π]、β∈[-π,π]分别表示点(x,y,z)在坐标系oxbybzb内的方位角和高低角;
33、所述姿态偏差限幅值将qmax_euler表示成矩阵形式,得到
34、
35、其中,符号“*”表示矩阵乘法。
36、可选的,步骤s5中所述控制力矩指令tc的表达式为:
37、
38、其中:tc、qe、ωe均为3×1维空间向量;qe、ωe分别表示空间任意欧拉轴方向姿态机动的三轴姿态误差和三轴角速度误差;kp、ki、kd为控制参数矩阵,
39、
40、与现有技术相比,本发明的有益效果在于:
41、本发明的任意轴向姿态机动递阶饱和角速度限幅方法,将适用于单轴方向的递阶饱和角速度限幅方法推广到空间任意欧拉轴方向,避免了单轴控制参数用于空间任意欧拉轴方向机动时,角速度限幅不正确的问题。在针对卫星各体轴独立完成控制参数设计的基础上,通过实际欧拉轴方向在卫星体轴方向的投影关系,即可利用体轴上的控制参数实现空间任意轴向(也即任意欧拉轴方向)相同角速度限幅的姿态机动控制,有效避免角速度限幅不正确可能引起的执行机构角动量饱和的问题,提高执行姿态机动任务的可靠性。本发明尤其适用于卫星频繁进行任意轴向大角度姿态机动任务中,能够确保不同机动轴向(也即欧拉轴向)姿态角速度同等限幅控制,保证控制力矩陀螺群角动量不会超出可用范围,提高控制系统可靠性。
技术特征:
1.一种任意轴向姿态机动递阶饱和角速度限幅方法,其特征在于,包含步骤:
2.如权利要求1所述的任意轴向姿态机动递阶饱和角速度限幅方法,其特征在于,步骤s1中:
3.如权利要求2所述的任意轴向姿态机动递阶饱和角速度限幅方法,其特征在于,步骤s2中所述递阶饱和控制律为:
4.如权利要求3所述的任意轴向姿态机动递阶饱和角速度限幅方法,其特征在于,步骤s3包括:
5.如权利要求4所述的任意轴向姿态机动递阶饱和角速度限幅方法,其特征在于,步骤s4包括:
6.如权利要求5所述的任意轴向姿态机动递阶饱和角速度限幅方法,其特征在于,步骤s5中所述控制力矩指令tc的表达式为:
技术总结
本发明提供一种任意轴向姿态机动递阶饱和角速度限幅方法,包含步骤:S1、基于卫星最大转动惯量I<subgt;max</subgt;和执行机构可提供的最大角动量H<subgt;max</subgt;,获得任意欧拉轴方向姿态机动角速度限幅值ω<subgt;max</subgt;;S2、基于执行机构可提供的最大控制力矩T<subgt;max</subgt;和ω<subgt;max</subgt;,分别针对卫星本体系三个体轴方向设计递阶饱和控制律,获取三个体轴方向用于机动任务的控制参数;S3、计算卫星从当前姿态到目标姿态的姿态偏差四元数q<subgt;err</subgt;,根据q<subgt;err</subgt;计算当前空间机动欧拉轴方向向量V<subgt;euler</subgt;,对V<subgt;euler</subgt;进行归一化处理,得到空间机动欧拉轴方向单位向量u<subgt;euler</subgt;;S4、根据控制参数与u<subgt;euler</subgt;,计算当前机动欧拉轴方向姿态偏差限幅参数q<subgt;max_euler</subgt;;S5、基于递阶饱和算法,计算当前机动欧拉轴方向姿态机动的控制力矩指令T<subgt;c</subgt;。
技术研发人员:操宏磊,蔡陈生,朱庆华,于常利,许贤锋,秦捷,吴梦旋,唐文国
受保护的技术使用者:上海航天控制技术研究所
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!