一种陆空两用侦察机器人的制作方法
本发明属于机器人,尤其涉及一种陆空两用侦察机器人。
背景技术:
1、在无人探测领域,侦察机器人的应用十分广泛,市场空间广阔,发展前景好。尤其是,在救援、巡查、监控、测绘、影视拍摄、新闻报道等方面,侦察机器人凭借着便捷、高效的特点,有着无可替代的地位。
2、然而,传统的侦察机器人因其移动方式的限制,对侦察的区域地形有着十分严格的要求。像灾区、矿井、隧道、战区等都是环境比较恶劣、地形十分复杂的区域,传统的侦察机器人在这些区域工作,会表现出严重的受限性,效率不高,难以体现出其优势和价值。为了解决这一问题,本发明提出了一种陆空两用侦察机器人技术解决方案。该方案中包含了整套新型陆空两用侦察机器人机身结构设计、功能构成、组件构成以及应用领域。
3、其中中国专利cn202310059372.0一种陆空两用侦察机器人,包括机器人的机身,所述机身上设有驱动轮、从动轮、舵面、上旋翼、下旋翼、分电板组件、飞控组件,电池组件,图传组件,摄像头组件,360°激光防撞仪,核探测模块,机架,外壳,空气监测仪,空气样本采集器;本发明侦察机器人可以利用驱动轮进行陆地行走,当遇到路况差不适合行走时,通过旋翼提供的升力实现起飞和在空中移动,突破了传统地面行走机器人的局限性,能够不受环境条件限制,既可在地面上灵活行走侦察,还能快速垂直起飞和回收,实现空中侦察需求,使侦察机器人工作更加灵活、高效。地面行走功能与空中飞行功能结合,使得所述陆空两用侦察机器人能够适应更广阔、更复杂的侦察环境。
4、但是现有侦察机器人无法同时进行地面和空中侦察,且现有侦察机器人长时间工作,无法持续进行续航,影响侦察效率。
技术实现思路
1、本发明的目的在于:为了解决现有侦察机器人无法同时进行地面和空中侦察,且现有侦察机器人长时间工作,无法持续进行续航,影响侦察效率而提出的一种陆空两用侦察机器人。
2、为了实现上述目的,本发明采用了如下技术方案:一种陆空两用侦察机器人,包括:
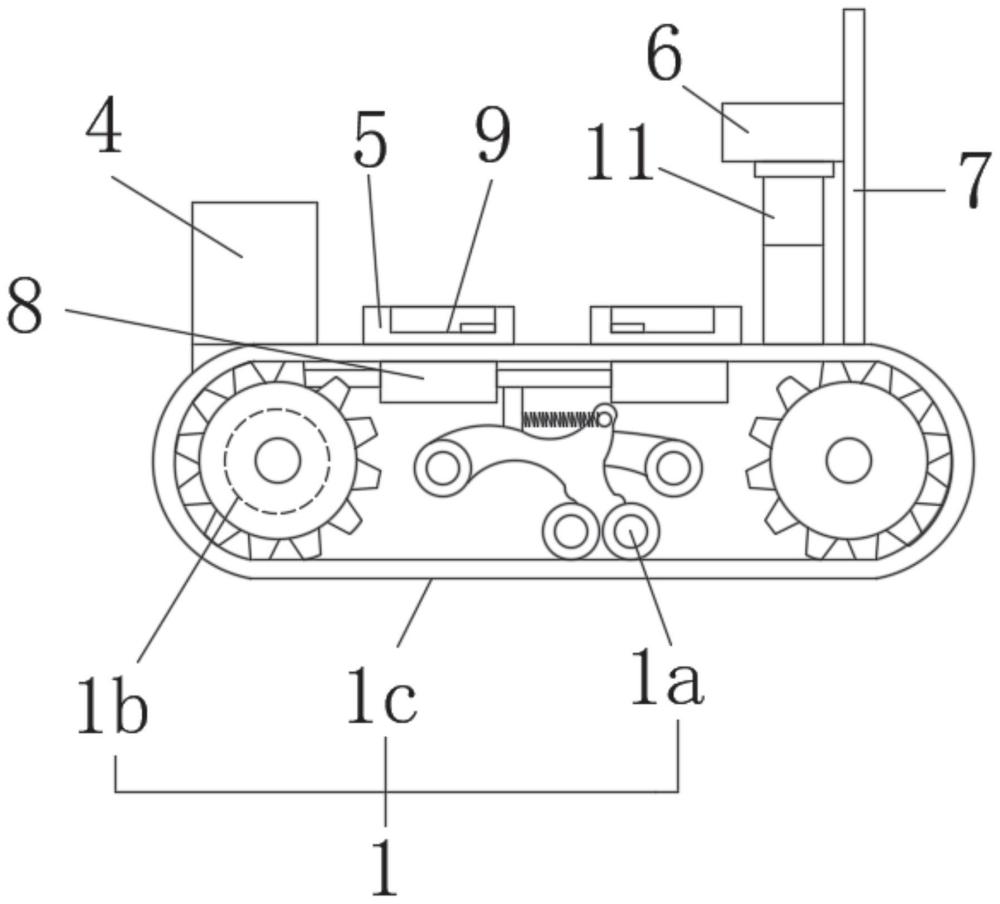
3、陆地巡防机构;所述陆地巡防机构包括悬挂结构、驱动结构和对称安装在所述悬挂结构两侧的履带结构,所述驱动结构驱动所述履带结构行走;
4、空中巡防机构;所述空中巡防机构包括无人机和视觉监测相机,所述视觉监测相机连接在所述无人机上,所述无人机底部设置有充电座;
5、所述悬挂结构上设置有安装板,所述安装板上设置有发电装置、若干个充电装置和巡防相机。
6、作为上述技术方案的进一步描述:
7、所述连接板上还设置有信号天线。
8、作为上述技术方案的进一步描述:
9、所述连接板底部设置有蓄电池,所述蓄电池和所述发电装置连接,所述充电装置和所述蓄电池连接。
10、作为上述技术方案的进一步描述:
11、所述充电装置的数量为至少2个,所述充电装置内设置有充电槽,所述充电座抵接在所述充电槽内。
12、作为上述技术方案的进一步描述:
13、所述发电装置为发电机或太阳能板发电装置。
14、作为上述技术方案的进一步描述:
15、所述连接板上设置有若干个安装槽体,所述信号天线和所述发电装置均可拆卸连接在所述安装槽体内。
16、作为上述技术方案的进一步描述:
17、所述伸缩杆可拆卸连接在所述连接槽体内。
18、综上所述,由于采用了上述技术方案,本发明的有益效果是:
19、1、本发明中,通过将陆空两用侦察机器人设置成陆地巡防机构和空中巡防机构,驱动结构驱动履带结构行走使得陆地巡防机构中的巡防相机对陆地周侧进行侦察巡防,同时配合无人机对空中进行侦察,在陆地巡防机构上设置有信号天线,当有异常的时候,陆地巡防机构会直接将信号发送至空中的无人机,使得无人机侦察可以更好地匹配陆地巡防机构,此结构可以同时实现陆地和空中同时侦察,提高侦察效率,满足对更复杂的环境进行侦察。
20、2、本发明中,通过设置发电装置和充电装置,通过在无人机底部设置充电座,发电装置为发电机或太阳能板发电装置,使得陆地巡防机构没电时,发电装置可以自动为其进行供电,同时无人机若续航时间不够时,也可以将其充电座自动抵接在充电装置上,增加续航,此结构可以实现侦察机器人的持续续航。
技术特征:
1.一种陆空两用侦察机器人,其特征在于,包括:
2.根据权利要求1所述的一种陆空两用侦察机器人,其特征在于,所述连接板上还设置有信号天线。
3.根据权利要求2所述的一种陆空两用侦察机器人,其特征在于,所述连接板底部设置有蓄电池,所述蓄电池和所述发电装置连接,所述充电装置和所述蓄电池连接。
4.根据权利要求1所述的一种陆空两用侦察机器人,其特征在于,所述充电装置的数量为至少2个,所述充电装置内设置有充电槽,所述充电座抵接在所述充电槽内。
5.根据权利要求1所述的一种陆空两用侦察机器人,其特征在于,所述发电装置为发电机或太阳能板发电装置。
6.根据权利要求1所述的一种陆空两用侦察机器人,其特征在于,所述连接板上设置有若干个安装槽体,所述信号天线和所述发电装置均可拆卸连接在所述安装槽体内。
7.根据权利要求1所述的一种陆空两用侦察机器人,其特征在于,所述巡防相机底部设置有伸缩杆,所述伸缩杆可拆卸连接在所述连接槽体内。
技术总结
本发明公开了一种陆空两用侦察机器人,包括:陆地巡防机构;所述陆地巡防机构包括悬挂结构、驱动结构和对称安装在所述悬挂结构两侧的履带结构,所述驱动结构驱动所述履带结构行走;空中巡防机构;所述空中巡防机构包括无人机和视觉监测相机,所述视觉监测相机连接在所述无人机上;所述悬挂结构上设置有安装板,所述安装板上设置有发电装置、若干个充电装置和巡防相机。本发明可以同时实现陆地和空中同时侦察,满足对更复杂的环境进行侦察,陆地巡防机构没电时,发电装置可以自动为其进行供电,同时无人机若续航时间不够时,也可以将其充电座自动抵接在充电装置上,增加续航,此结构可以实现侦察机器人的持续续航。
技术研发人员:侯小强,朱文欢
受保护的技术使用者:宇卫创海智能装备(苏州)有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!