一种电力巡检无人机的制作方法
本技术涉及电力智能巡检,具体而言,涉及一种电力巡检无人机。
背景技术:
1、无人机广义上为不需要驾驶员登机驾驶的各式遥控飞行器,无人机上无驾驶舱,但安装有自动驾驶仪和程序控制装置等设备,地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输,无人机的应用非常广泛。
2、电力巡检无人机能够很好的对架空电力线路及设备进行巡视,已在电力公司大范围应用。
3、但是,现有的电力巡检无人机在工作过程中还存在着许多不足,例如由于目前的无人机设备均采用蓄电池进行供电,以保障设备的正常巡检工作,而蓄电池的供电量有限,往往飞一段就需要进行电池的更换,特别是在强风条件下飞行过程中,飞机设备自身的飞行阻力增大,实际可持续飞行距离进一步减少。
技术实现思路
1、鉴于此,本实用新型提出了一种电力巡检无人机,旨在解决现有电力巡检无人机在强风条件下飞行过程中因飞行阻力增大使得持续飞行距离减小的问题。
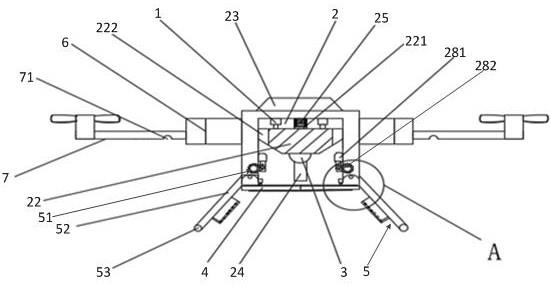
2、本实用新型提出了一种电力巡检无人机,该无人机包括:机体、设备仓体和巡检摄像头;其中,所述设备仓体设置在所述机体上,所述巡检摄像头以能够活动的方式设置在所述设备仓体内;所述设备仓体的仓口处设有一对活动展翼板;所述活动展翼板与所述设备仓体沿所述设备仓体的仓口口壁以能够滑移的方式相连接,用于封闭设备仓体的仓口,以使所述巡检摄像头封闭在所述设备仓体的内部,所述活动展翼板还能够打开所述设备仓体的仓口,以使所述巡检摄像头能够自所述设备仓体的仓口处滑动并伸出至所述设备仓体的外部,以进行图像采集;所述设备仓体的两侧均可转动地连接有展翼板卡固机构,用于对滑出的活动展翼板进行支撑,并带动所述活动展翼板转动至倾斜向上位置,以形成v型结构,起到降低无人机飞行过程中风阻的作用。
3、进一步地,上述电力巡检无人机,所述展翼板卡固机构包括:转动支轴和两个起降支撑杆;其中,所述转动支轴可转动地设置在所述设备仓体上;两个所述起降支撑杆分别设置在所述转动支轴的两端,并且,两个所述起降支撑杆之间设有起降横杆,所述起降横杆、两个所述起降支撑杆以及所述转动支轴形成四边形结构;两个所述起降支撑杆相对一侧侧壁之间均设有辅助插槽,用于在所述活动展翼板滑出并打开所述设备仓体的仓口时,对所述活动展翼板进行支撑,以使所述活动展翼板的两侧能够分别可滑动地插设至两个所述辅助插槽内,进而使得所述活动展翼板随所述四边形结构进行转动。
4、进一步地,上述电力巡检无人机,所述设备仓体上设有第一驱动机构,其动力输出端与所述展翼板卡固机构相连接,用于驱动展翼板卡固机构转动。
5、进一步地,上述电力巡检无人机,所述第一驱动机构包括:第一驱动电机和第一传动件;其中,所述第一传动件的动力输入端与所述第一驱动电机相连接,所述第一传动件的动力输出端与所述展翼板卡固机构的转动支轴相连接,用于在所述第一驱动电机的作用下驱动所述转动支轴进行转动,以带动卡设在所述展翼板卡固机构上的活动展翼板进行转动。
6、进一步地,上述电力巡检无人机,所述设备仓体还设有第二驱动机构,用于驱动所述活动展翼板进行滑移。
7、进一步地,上述电力巡检无人机,所述第二驱动机构包括:第二驱动电机和第二传动件;其中,所述第二传动件的动力输入端与所述第二驱动电机相连接,所述第二传动件的动力输出端与所述活动展翼板相连接,用于将所述第二驱动电机的转动转化为所述活动展翼板的往复直线运动。
8、进一步地,上述电力巡检无人机,所述第二传动件包括:相啮合的驱动齿轮和传动齿条;其中,所述驱动齿轮设置在所述第二驱动电机的输出轴上,所述传动齿条设置在所述活动展翼板上,用于在所述二驱动电机的驱动作用下,带动所述活动展翼板进行往复直线运动。
9、进一步地,上述电力巡检无人机,所述设备仓体还设有用于支撑所述巡检摄像头的支撑块,所述支撑块与所述设备仓体的内壁可滑动地相连接,并且,所述支撑块连接有第三驱动机构,用于驱动所述支撑块进行滑动,以使所述支撑块上的巡检摄像头伸出至所述设备仓体外或回缩至所述设备仓体的内部。
10、进一步地,上述电力巡检无人机,所述支撑块的底部呈倒置梯形结构,用于使得所述倒置梯形结构能够凸出至所述设备仓体外以破风导流;所述设备仓体的侧壁上设有导槽,所述支撑块的侧壁上设有与导槽相适配的导向槽块,所述导槽内还设有吸震簧。
11、进一步地,上述电力巡检无人机,所述设备仓体的仓口口壁设有滑移槽块,用于对所述活动展翼板的滑移进行导向和支撑;所述机体的四角均设有螺旋翼驱动支杆和螺旋翼驱动块,并且,各所述螺旋翼驱动块上均设有定位槽,用于在展翼板卡固机构转动至倾斜向上位置时,对展翼板卡固机构进行卡固,以使所述展翼板卡固机构的端部能够卡钳在所述定位槽内;所述活动展翼板上还设有引流槽。
12、本实用新型提供的电力巡检无人机,通过活动展翼板封闭设备仓体的仓口,以使巡检摄像头封闭在设备仓体的内部,活动展翼板还能够打开设备仓体的仓口,以使巡检摄像头能够自设备仓体的仓口处滑动并伸出至设备仓体的外部,以进行图像采集;通过展翼板卡固机构对滑出的活动展翼板进行支撑,并带动活动展翼板转动至倾斜向上位置,以形成v型结构,有助于实现在飞行过程中的破风导流作用,达到降风阻的目的,且减小现有无人飞行设备起落架挂置带来的对巡检摄像头图像采集影响,还能够避免监控死角可能发生的起落架与电力线缆之间的擦碰风险,即通过对电力巡检无人机底部的结构改进,优化了该无人机的空气动力学性能,有助于实现在飞行过程中的破风导流作用,达到降风阻的目的,降低能耗,提升巡检续航的目的,同时,减小现有无人飞行设备起落架挂置带来的对巡检摄像头图像采集影响,还能够避免监控死角可能发生的起落架与电力线缆之间的擦碰风险,解决了现有电力巡检无人机在强风条件下飞行过程中因飞行阻力增大使得持续飞行距离减小的问题。
技术特征:
1.一种电力巡检无人机,其特征在于,包括:机体、设备仓体和巡检摄像头;其中,
2.根据权利要求1所述的电力巡检无人机,其特征在于,所述展翼板卡固机构包括:转动支轴和两个起降支撑杆;其中,
3.根据权利要求1或2所述的电力巡检无人机,其特征在于,
4.根据权利要求3所述的电力巡检无人机,其特征在于,所述第一驱动机构包括:第一驱动电机和第一传动件;其中,
5.根据权利要求1或2所述的电力巡检无人机,其特征在于,
6.根据权利要求5所述的电力巡检无人机,其特征在于,所述第二驱动机构包括:第二驱动电机和第二传动件;其中,
7.根据权利要求6所述的电力巡检无人机,其特征在于,所述第二传动件包括:相啮合的驱动齿轮和传动齿条;其中,
8.根据权利要求1或2所述的电力巡检无人机,其特征在于,
9.根据权利要求8所述的电力巡检无人机,其特征在于,
10.根据权利要求1或2所述的电力巡检无人机,其特征在于,
技术总结
本技术提供了一种电力巡检无人机,该无人机包括:机体、设备仓体和巡检摄像头;其中,所述设备仓体设置在所述机体上,所述巡检摄像头以能够活动的方式设置在所述设备仓体内;所述设备仓体的仓口处设有一对活动展翼板;所述活动展翼板与所述设备仓体沿所述设备仓体的仓口口壁以能够滑移的方式相连接;所述设备仓体的两侧均可转动地连接有展翼板卡固机构。本技术通过展翼板卡固机构对滑出的活动展翼板进行支撑,并带动活动展翼板转动至倾斜向上位置,以形成V型结构,有助于实现在飞行过程中的破风导流作用,达到降风阻的目的,有助于实现在飞行过程中的破风导流作用,达到降风阻的目的,降低能耗,提升巡检续航的目的。
技术研发人员:付晶,文志科,刘壮,邵瑰玮,张波,蔡焕青,胡霁,杨宁,凡启康,谈家英
受保护的技术使用者:中国电力科学研究院有限公司
技术研发日:20230106
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!