一种运输无人机的吊装机构
本技术涉及运输无人机,尤其涉及一种运输无人机的吊装机构。
背景技术:
1、无人机快递(uavexpress),即通过利用无线电遥控设备和自备的程序控制装置操纵的无人驾驶的低空飞行器运载包裹,自动送达目的地,其优点主要在于解决偏远地区的配送问题,提高配送效率,同时减少人力成本。
2、经检索,现有专利(公开号:cn214267978u)公开了一种用于救灾的无人机货物吊装装置,针对现有的无人机货物吊装装置,无法实现对不同大小尺寸的集装箱进行夹持紧固,且集装箱吊装时稳定性差,同时无人机降落时,地面上的凸起物容易对集装箱造成直接撞击的损坏的问题。现提出如下方案,其包括安装板,所述安装板的底部四周均固定有安装块,安装块上均开设有安装孔,安装板的底部均滑动连接有两个相对称的l型夹板。本实用新型通过防撞机构,并当无人机降落时,突遇地面上的凸起物,继而使防撞板能够对地面凸起物进行碰触,且配合伸缩内杆、固定外杆、弹簧二的设置,能够避免集装箱遭受地面凸起物的撞击,避免造成集装箱的损坏。发明人在实现本实用新型的过程中发现该技术存在如下问题:
3、该实用新型在工作时,不易达到自动提取货物,与到达目的地后自动卸下货物的效果,工作效率不高。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种运输无人机的吊装机构。
2、为了实现上述目的,本实用新型采用了如下技术方案:
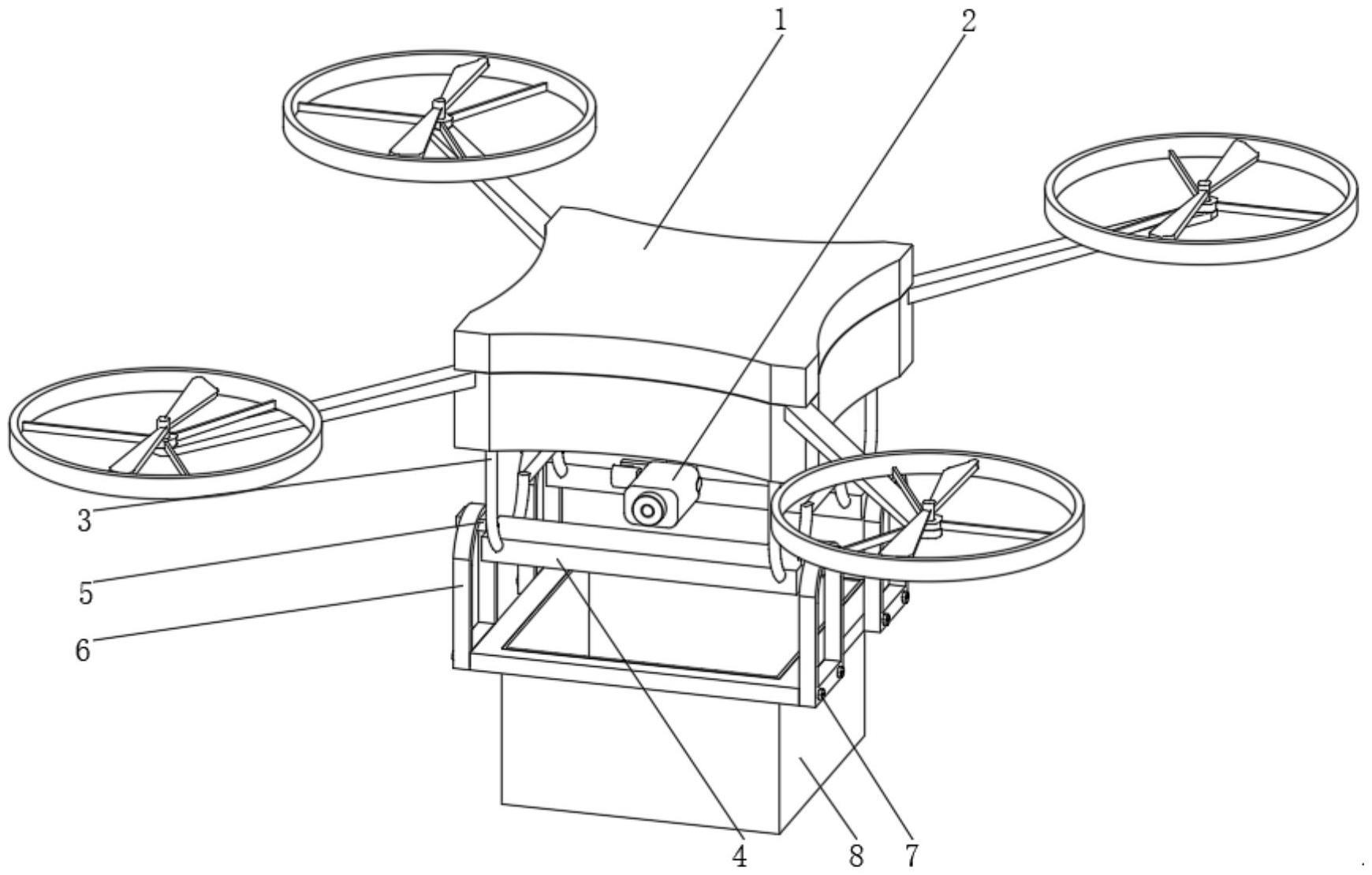
3、一种运输无人机的吊装机构,包括无人机主体,所述无人机主体的底面安装有摄像头,所述无人机主体底面的两侧设置有起落架,所述起落架之间连接有支撑垫,所述支撑垫的两端安装有吊装装置,所述吊装装置的一端设置有有吊环,所述吊环的外侧靠近底部位置设置有螺栓,所述吊环通过螺栓螺纹连接储物篮。
4、优选地,所述吊装装置包括吊钩,所述吊钩的一侧设置有转轴,所述转轴嵌设于支撑垫的内部,转轴的另一侧安装有其中一个半圆齿轮,所述其中一个半圆齿轮啮合另一个半圆齿轮,所述另一个半圆齿轮转动连接连杆,所述连杆的另一端安装有螺纹柱,所述螺纹柱的外表面啮合有电机的输出端。
5、优选地,所述另一个半圆齿轮的圆心通过转轴固定于支撑垫的内壁,所述连杆通过固定环固定于支撑垫的内壁。
6、优选地,所述吊环顶端的形状呈半圆形,且吊环顶端的形状与吊钩顶端凹槽的形状相契合。
7、优选地,所述吊装装置的数量为四个,且吊装装置以无人机主体的中心点呈对称分布。
8、优选地,所述转轴与支撑垫是转动连接,所述吊装装置与吊环是卡合连接。
9、本实用新型具有以下有益效果:
10、1、首先工作人员把装好货物的储物放置于对应的位置,再把无人机的支撑放置于储物框架上对应的位置,启动电机,电机带动输出端啮合的螺纹,螺纹向外推,带动其中一个半圆齿转动,其中一个半圆齿啮合另一个半圆齿,另一个半圆齿通过转带动吊转动,此时启动无人机的动力电源,无人机主上升,吊卡合吊,使吊通过螺螺纹连接的储物上升,在运货过程中使用摄像进行探测情况,节省了部分人力成本,实现部分自动化效果。
11、2、送货无人机在到达目的地之后,在指定位置降落,使得吊钩的高度低于吊环顶部底面的高度,使得吊钩与吊环脱离,此时启动电机,使电机往另一个方向转,电机带动输出端啮合的螺纹柱,螺纹柱向内推,带动其中一个半圆齿轮转动,其中一个半圆齿轮啮合另一个半圆齿轮,另一个半圆齿轮通过转轴带动吊钩反方向转动,此时无人机主体上升,无人机主体脱离储物篮,不需要手动卸货,提高了工作人员的工作效率,即使接收者暂不在也能够完成送货。
技术特征:
1.一种运输无人机的吊装机构,包括无人机主体(1),其特征在于,所述无人机主体(1)的底面安装有摄像头(2),所述无人机主体(1)底面的两侧设置有起落架(3),所述起落架(3)之间连接有支撑垫(4),所述支撑垫(4)的两端安装有吊装装置(5),所述吊装装置(5)的一端设置有有吊环(6),所述吊环(6)的外侧靠近底部位置设置有螺栓(7),所述吊环(6)通过螺栓(7)螺纹连接储物篮(8)。
2.根据权利要求1所述的一种运输无人机的吊装机构,其特征在于,所述吊装装置(5)包括吊钩(501),所述吊钩(501)的一侧设置有转轴(502),所述转轴(502)嵌设于支撑垫(4)的内部,转轴(502)的另一侧安装有其中一个半圆齿轮(503),所述其中一个半圆齿轮(503)啮合另一个半圆齿轮(503),所述另一个半圆齿轮(503)转动连接连杆(504),所述连杆(504)的另一端安装有螺纹柱(505),所述螺纹柱(505)的外表面啮合有电机(506)的输出端。
3.根据权利要求2所述的一种运输无人机的吊装机构,其特征在于,所述另一个半圆齿轮(503)的圆心通过转轴(502)固定于支撑垫(4)的内壁,所述连杆(504)通过固定环固定于支撑垫(4)的内壁。
4.根据权利要求1或2所述的一种运输无人机的吊装机构,其特征在于,所述吊环(6)顶端的形状呈半圆形,且吊环(6)顶端的形状与吊钩(501)顶端凹槽的形状相契合。
5.根据权利要求1所述的一种运输无人机的吊装机构,其特征在于,所述吊装装置(5)的数量为四个,且吊装装置(5)以无人机主体(1)的中心点呈对称分布。
6.根据权利要求2所述的一种运输无人机的吊装机构,其特征在于,所述转轴(502)与支撑垫(4)是转动连接,所述吊装装置(5)与吊环(6)是卡合连接。
技术总结
本技术公开了一种运输无人机的吊装机构,包括无人机主体,所述无人机主体的底面安装有摄像头,所述无人机主体底面的两侧设置有起落架,所述起落架之间连接有支撑垫,所述支撑垫的两端安装有吊装装置,所述吊装装置的一端设置有有吊环,所述吊环的外侧靠近底部位置设置有螺栓,所述吊环通过螺栓螺纹连接储物篮;本技术,在到达目的地之后,在指定位置降落,使得吊钩的高度低于吊环顶部底面的高度,使得吊钩与吊环脱离,电机带动吊钩转动,升高无人机主体,使无人机主体脱离储物篮,不需要手动卸货,提高了工作人员的工作效率,即使接收者暂不在也能够完成送货,节省了部分人力成本,实现部分自动化效果。
技术研发人员:张虹波,匡银虎
受保护的技术使用者:宁夏大学
技术研发日:20230228
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!