一种可运送小型集装箱的物流无人机的制作方法
本技术涉及物流无人机,具体地说,涉及一种可运送小型集装箱的物流无人机。
背景技术:
1、国内物流无人机技术目前主要为消费级或者航模改制而成,多为四至八旋翼的x型结构,结构复杂、成本较高,电池拆装不方便,布局集成度低。
2、公开号为cn109625257a的专利公开一种物流无人机,包括机身、贯穿机身并呈井字型布置的四根旋翼轴,旋翼轴的两端分别伸出机身,旋翼轴的两端分别连接有旋翼,四根旋翼轴包括两根相对设置的第一旋翼轴和两根相对设置的第二旋翼轴,第一旋翼轴位于第二旋翼轴的上方。根据上述技术方案,本申请以井字型框架搭建旋翼轴,结构简洁、刚度高、重量低。
3、虽然上述技术方案以井字型框架搭建旋翼轴,结构简洁、刚度高、重量低,但是其在进行一些小型的物流箱运送时不够便捷,通过绳索直接将物流箱绑定后运输,容易导致物流箱的晃动,不能保证其稳定运输,且绳索的拆卸和固定都较为不便,使用起来费时费力。
技术实现思路
1、本实用新型的目的在于提供一种可运送小型集装箱的物流无人机,以解决上述背景技术中提出的进行一些小型的物流箱运送时不够便捷,通过绳索直接将物流箱绑定后运输,容易导致物流箱的晃动,不能保证其稳定运输,且绳索的拆卸和固定都较为不便,使用起来费时费力的问题。
2、为实现上述目的,本实用新型提供了一种可运送小型集装箱的物流无人机,包括无人机主体,所述无人机主体的底部安装有底座,所述底座四周外侧安装有若干绞盘提升组件,所述绞盘提升组件包括电动绞盘,所述电动绞盘的输出端安装有绳索,所述绳索的底端安装有挂钩,所述无人机主体的下方通过挂钩挂在物流箱的顶部挂载环处,并通过绳索拉紧,从而将物流箱稳定提拉。
3、作为优选,所述绞盘提升组件的数量为四个,分别位于底座的四个拐角处。
4、作为优选,所述无人机主体的底部安装有处理器,所述处理器用控制四个电动绞盘同步工作。
5、作为优选,所述挂钩为弧形结构,所述挂钩的上部设置有限位板,所述限位板为l形结构,且所述限位板的一端设置有活动板,所述活动板的顶端铰接在限位板的拐角处内侧,所述挂钩的顶部表面开设有卡槽,所述活动板的底端卡在卡槽的内部。
6、作为优选,所述绳索靠近限位板的一侧外壁开设有滑槽,所述滑槽的内部上方安装有弹簧,所述弹簧的底端与限位板的端头处焊接固定。
7、作为优选,所述电动绞盘的输出端外侧竖向安装有导向套,所述绳索从导向套穿过。
8、作为优选,所述限位板与活动板的铰接处安装有扭力弹簧。
9、与现有技术相比,本实用新型的有益效果:
10、1、该可运送小型集装箱的物流无人机中,通过绞盘提升组件能够带动绳索将物流箱进行提拉,通过四个电动绞盘将绳索同步拉紧,从而保证物流箱的稳定,且通过限位板起到很好的限位,避免挂钩产生滑脱。
11、2、该可运送小型集装箱的物流无人机中,通过弹簧能够将限位板压紧,从而使得活动板的底端卡在卡槽内部,保证对挂钩的限位,避免挂钩产生松动脱落。
技术特征:
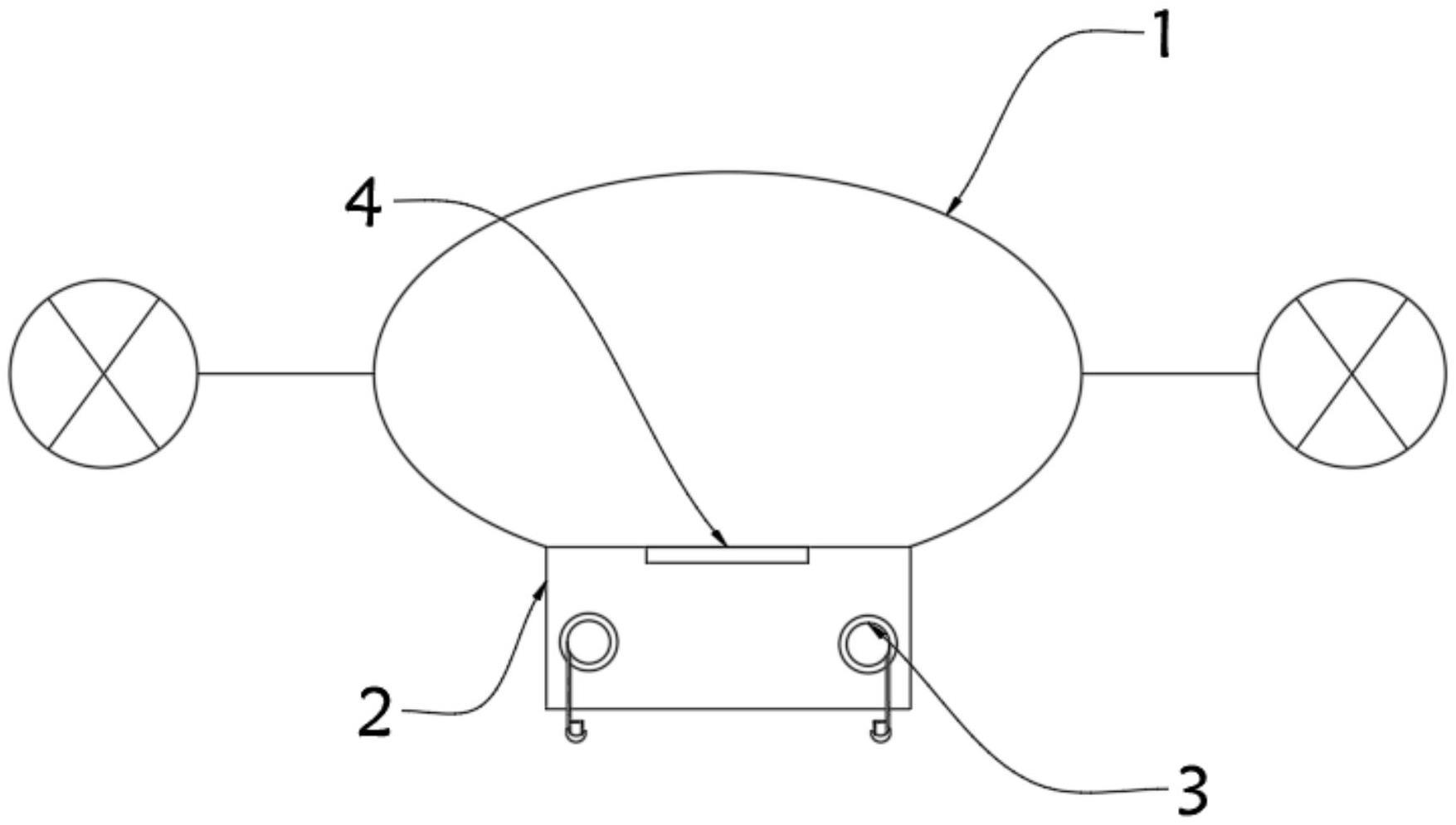
1.一种可运送小型集装箱的物流无人机,包括无人机主体(1),其特征在于:所述无人机主体(1)的底部安装有底座(2),所述底座(2)四周外侧安装有若干绞盘提升组件(3),所述绞盘提升组件(3)包括电动绞盘(31),所述电动绞盘(31)的输出端安装有绳索(32),所述绳索(32)的底端安装有挂钩(33),所述无人机主体(1)的下方通过挂钩(33)挂在物流箱(5)的顶部挂载环(51)处,并通过绳索(32)拉紧,从而将物流箱(5)稳定提拉。
2.根据权利要求1所述的可运送小型集装箱的物流无人机,其特征在于:所述绞盘提升组件(3)的数量为四个,分别位于底座(2)的四个拐角处。
3.根据权利要求1所述的可运送小型集装箱的物流无人机,其特征在于:所述无人机主体(1)的底部安装有处理器(4),所述处理器(4)用控制四个电动绞盘(31)同步工作。
4.根据权利要求1所述的可运送小型集装箱的物流无人机,其特征在于:所述挂钩(33)为弧形结构,所述挂钩(33)的上部设置有限位板(34),所述限位板(34)为l形结构,且所述限位板(34)的一端设置有活动板(341),所述活动板(341)的顶端铰接在限位板(34)的拐角处内侧,所述挂钩(33)的顶部表面开设有卡槽(331),所述活动板(341)的底端卡在卡槽(331)的内部。
5.根据权利要求4所述的可运送小型集装箱的物流无人机,其特征在于:所述绳索(32)靠近限位板(34)的一侧外壁开设有滑槽(321),所述滑槽(321)的内部上方安装有弹簧(342),所述弹簧(342)的底端与限位板(34)的端头处焊接固定。
6.根据权利要求1所述的可运送小型集装箱的物流无人机,其特征在于:所述电动绞盘(31)的输出端外侧竖向安装有导向套(311),所述绳索(32)从导向套(311)穿过。
7.根据权利要求4所述的可运送小型集装箱的物流无人机,其特征在于:所述限位板(34)与活动板(341)的铰接处安装有扭力弹簧。
技术总结
本技术涉及物流无人机技术领域,具体为一种可运送小型集装箱的物流无人机,包括无人机主体,无人机主体的底部安装有底座,底座四周外侧安装有若干绞盘提升组件,绞盘提升组件包括电动绞盘,电动绞盘的输出端安装有绳索,绳索的底端安装有挂钩,无人机主体的下方通过挂钩挂在物流箱的顶部挂载环处,并通过绳索拉紧,从而将物流箱稳定提拉。该可运送小型集装箱的物流无人机中,通过绞盘提升组件能够带动绳索将物流箱进行提拉,通过四个电动绞盘将绳索同步拉紧,从而保证物流箱的稳定,且通过限位板起到很好的限位,避免挂钩产生滑脱。通过弹簧能够将限位板压紧,从而使得活动板的底端卡在卡槽内部,保证对挂钩的限位,避免挂钩产生松动脱落。
技术研发人员:兰玉栋,兰钧尧
受保护的技术使用者:青岛云世纪信息科技有限公司
技术研发日:20230421
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!