一种能够调节重心的无人机支架的制作方法
本技术属于无人机,具体涉及一种能够调节重心的无人机支架。
背景技术:
1、无人驾驶飞机简称“无人机”(uav),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。随着无人机的技术的发展,无人机已经广泛应用于地质勘察、交通巡航、农业种植、军事侦察、航天航拍、娱乐休闲等多个领域。
2、无人机进行户外作业完毕进行降落着陆时,由于地理环境的不可控特性,其着陆时的地面可能存在倾斜的情况,无人机降落于倾斜的地面时,会导致无人机重心倾斜,当倾斜超过一定角度时,会引发无人机着陆不稳、倾倒、侧翻等情况,甚至造成无人机损坏的情况,如公开号为cn214824078u所公开的一种多旋翼无人机起落架,其虽然通过缩小进气口的方式,降低弹簧的恢复速度,达到无人机着陆时直接与地面硬着陆而容易发生冲击,容易造成无人机发生倾倒或损坏而影响后续的使用的问题,但是,其无法解决由于地面倾斜导致的无人机发生重心倾斜,引发无人机倾倒、侧翻,甚至损坏的问题,基于上述问题,本申请文件提出了一种能够调节重心的无人机支架以解决由于地面倾斜导致的无人机着陆时重心倾斜的问题。
技术实现思路
1、本实用新型的目的是提供一种能够调节重心的无人机支架,在无人机降落于倾斜地面时,根据倾斜的角度,启动第一驱动元件和第二驱动元件,通过第一驱动元件和第二驱动元件的配合,对导向杆的方向和配重块的位置进行调整,通过配重块对倾斜状态的无人机的重心进行调节,降低无人机在倾斜地面着陆时发生着陆不稳,侧翻的概率。
2、本实用新型采取的技术方案具体如下:
3、一种能够调节重心的无人机支架,包括主体支架,所述主体支架的内部设置有承载板,所述承载板的上端固定有角度传感器,所述主体支架的下端设置有配重块,所述承载板的下端装配有重心调节部,且所述重心调节部和配重块相连接,其中,所述角度传感器能够监测主体支架的倾斜度并驱动重心调节部调整配重块的位置。
4、进一步的,所述重心调节部包括第一驱动元件、u形板、第二驱动元件、轴杆、导向杆和传动衬套和,所述第一驱动元件固定于承载板的上端,所述u形板固定于承载板的输出端,所述第二驱动元件固定于u形板的一端,所述轴杆固定于第二驱动元件的输出端,且所述轴杆和u形板转动连接,所述导向杆固定于u形板的另一端,且所述导向杆远离u形板的一端和轴杆转动连接,所述传动衬套螺纹连接于轴杆的外侧,所述传动衬套和导向杆以及配重块和导向杆之间均为滑动连接,所述配重块和传动衬套固定连接。
5、进一步的,所述主体支架底部的四个端角均固定有支腿,且多个所述支腿呈环形分布于主体支架的下端,位于对角的两个所述支腿之间的距离大于导向杆的旋转直径。
6、进一步的,所述导向杆的外侧开设有导向通槽,所述传动衬套的外侧固定有导向销杆,所述导向销杆滑动连接于导向通槽的内部,所述导向杆和传动衬套通过导向销杆和导向通槽滑动连接。
7、进一步的,所述配重块、轴杆、导向杆和传动衬套的重量之和等于第二驱动元件的重量。
8、进一步的,所述配重块的形状为球形或椭圆形。
9、本实用新型取得的技术效果为:
10、本实用新型在无人机降落于倾斜地面时,根据倾斜的角度,启动第一驱动元件和第二驱动元件,通过第一驱动元件和第二驱动元件的配合,对导向杆的方向和配重块的位置进行调整,通过配重块对倾斜状态的无人机的重心进行调节,降低无人机在倾斜地面着陆时发生着陆不稳,侧翻的概率。
11、本实用新型通过角度传感器对着陆状态的无人机的倾斜角度进行监测,通过配套使用的程序计算配重块的移动方向和移动距离,能够自动对配重块的位置进行调节,进而对着陆于倾斜地面的无人机进行重心调节,无需人工干预,使得装置便于使用。
技术特征:
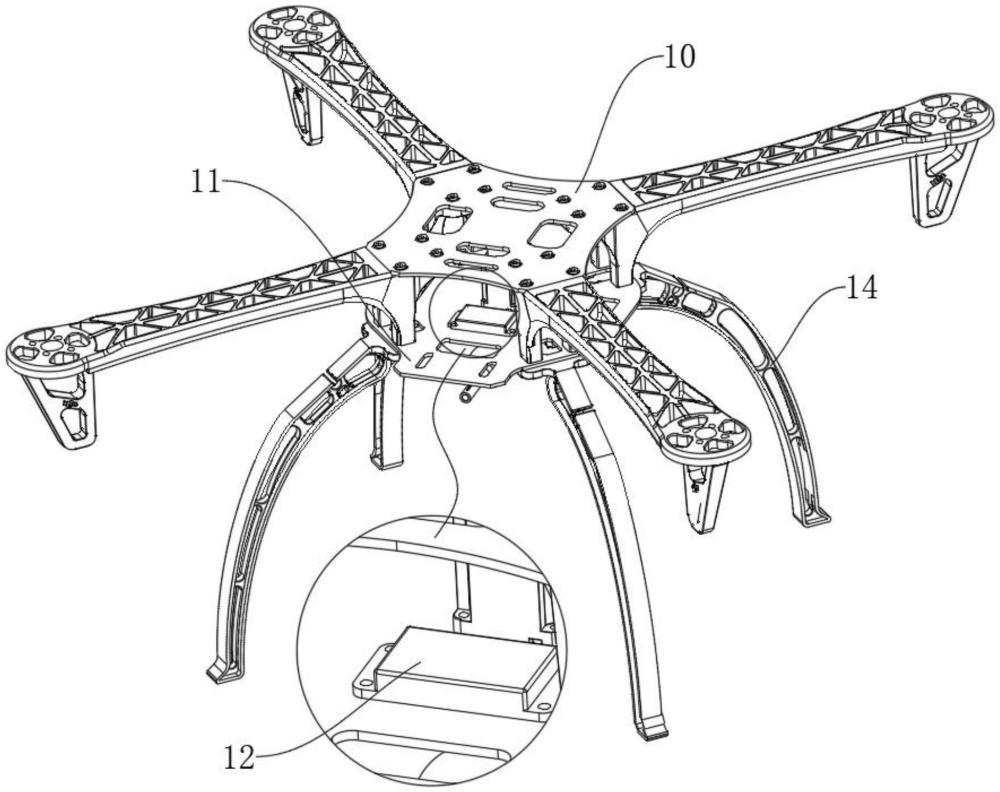
1.一种能够调节重心的无人机支架,应用于无人机,其特征在于:包括主体支架(10),所述主体支架(10)的内部设置有承载板(11),所述承载板(11)的上端固定有角度传感器(12),所述主体支架(10)的下端设置有配重块(13),所述承载板(11)的下端装配有重心调节部(20),且所述重心调节部(20)和配重块(13)相连接,其中,所述角度传感器(12)能够监测主体支架(10)的倾斜度并驱动重心调节部(20)调整配重块(13)的位置。
2.根据权利要求1所述的一种能够调节重心的无人机支架,其特征在于:所述重心调节部(20)包括第一驱动元件(21)、u形板(22)、第二驱动元件(23)、轴杆(24)、导向杆(25)和传动衬套(26)和,所述第一驱动元件(21)固定于承载板(11)的上端,所述u形板(22)固定于承载板(11)的输出端,所述第二驱动元件(23)固定于u形板(22)的一端,所述轴杆(24)固定于第二驱动元件(23)的输出端,且所述轴杆(24)和u形板(22)转动连接,所述导向杆(25)固定于u形板(22)的另一端,且所述导向杆(25)远离u形板(22)的一端和轴杆(24)转动连接,所述传动衬套(26)螺纹连接于轴杆(24)的外侧,所述传动衬套(26)和导向杆(25)以及配重块(13)和导向杆(25)之间均为滑动连接,所述配重块(13)和传动衬套(26)固定连接。
3.根据权利要求2所述的一种能够调节重心的无人机支架,其特征在于:所述主体支架(10)底部的四个端角均固定有支腿(14),且多个所述支腿(14)呈环形分布于主体支架(10)的下端,位于对角的两个所述支腿(14)之间的距离大于导向杆(25)的旋转直径。
4.根据权利要求2所述的一种能够调节重心的无人机支架,其特征在于:所述导向杆(25)的外侧开设有导向通槽,所述传动衬套(26)的外侧固定有导向销杆,所述导向销杆滑动连接于导向通槽的内部,所述导向杆(25)和传动衬套(26)通过导向销杆和导向通槽滑动连接。
5.根据权利要求2所述的一种能够调节重心的无人机支架,其特征在于:所述配重块(13)、轴杆(24)、导向杆(25)和传动衬套(26)的重量之和等于第二驱动元件(23)的重量。
6.根据权利要求1所述的一种能够调节重心的无人机支架,其特征在于:所述配重块(13)的形状为球形或椭圆形。
技术总结
本技术属于无人机技术领域,具体涉及一种能够调节重心的无人机支架,包括主体支架,所述主体支架的内部设置有承载板,所述承载板的上端固定有角度传感器,所述配重块的下端设置有配重块,所述承载板的下端装配有重心调节部,且所述重心调节部和配重块相连接,其中,所述角度传感器能够监测主体支架的倾斜度并驱动重心调节部调整配重块的位置。本技术在无人机降落于倾斜地面时,根据倾斜的角度,启动第一驱动元件和第二驱动元件,通过第一驱动元件和第二驱动元件的配合,对导向杆的方向和配重块的位置进行调整,通过配重块对倾斜状态的无人机的重心进行调节,降低无人机在倾斜地面着陆时发生着陆不稳,侧翻的概率。
技术研发人员:常金成,江永林
受保护的技术使用者:南京钢果电子科技有限公司
技术研发日:20230517
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!