一种共轴四旋翼飞行器升力系统的制作方法
本技术涉及旋翼飞行器,具体涉及一种共轴四旋翼飞行器升力系统。
背景技术:
1、目前,旋翼类飞行器的主要代表是固定桨距的电动多旋翼无人机和背负式旋翼布局的直升机。其中,旋翼直升机用途最广,一般都是燃油动力带动一个或两个旋翼桨叶系统旋转,它们的旋翼系统由桨叶和桨毂组成,桨毂与主动轴垂直铰接安装,桨毂上设有挥舞铰、振摆铰和变矩铰,桨叶采用铰接方式安装在桨毂上,通过液压拉杆配合滑环上的姿态倾斜盘来控制桨叶变矩。旋翼桨叶变矩系统的结构设计繁杂,变矩机构件体积大,能耗高,变矩角度有限,气动力效率低,环境适应能力差,安全稳定性不高,还极大的限制了飞行速度,无法向微型化、无人化、多旋翼、高航速方向发展,而且大多数安全事故都是因桨毂系统故障导致坠机。
技术实现思路
1、本实用新型的目的就是针对上述之不足,而提供一种共轴四旋翼飞行器升力系统。
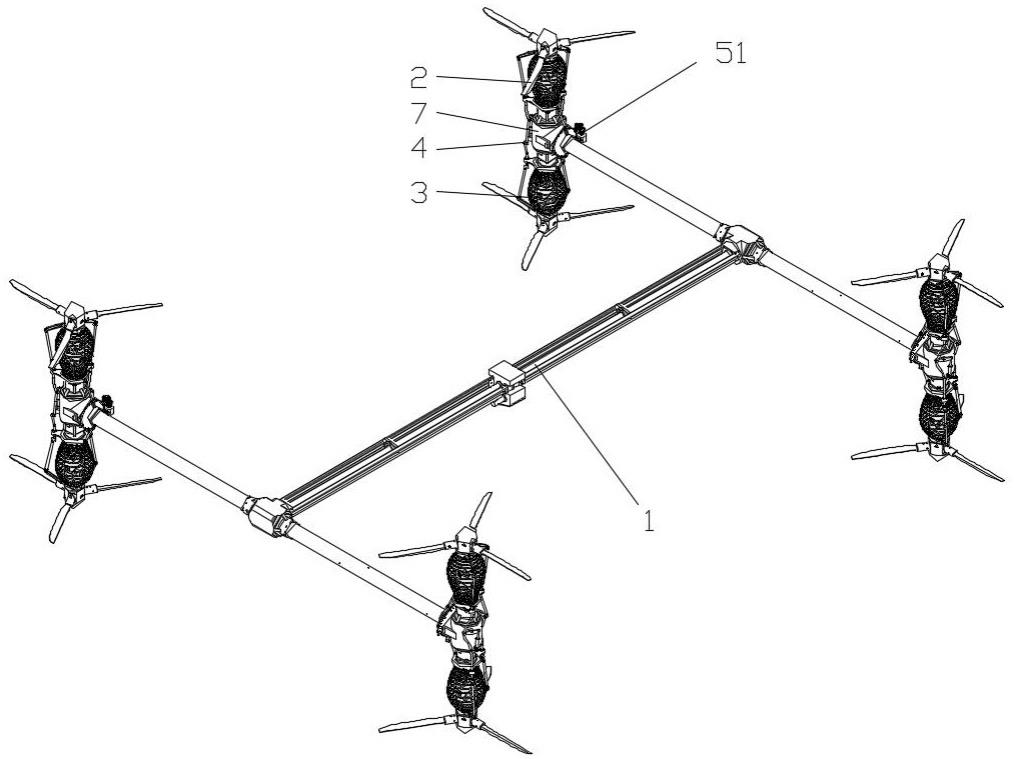
2、本实用新型包括工字型主传动机构,工字型主传动机构的四个动力输出端上分别设有柔性旋翼装置以及与柔性旋翼装置对应的旋翼倾转机构,
3、柔性旋翼装置包括上旋翼机构、下旋翼机构、多自由度平衡机构和三级齿轮箱,
4、三级齿轮箱为三通管状结构,三级齿轮箱的动力输入端安装在工字型主传动机构动力输出端上,
5、上旋翼机构和下旋翼机构分别反方向垂直安装在三级齿轮箱的两个动力输出端上,并分别与工字型主传动机构动力输出端的传动轴在三级齿轮箱内传动;
6、多自由度平衡机构安装在三级齿轮箱上,并控制上旋翼机构和下旋翼机构的旋翼桨毂做同步姿态倾斜;
7、旋翼倾转机构安装在工字型主传动机构的动力输出端上,并控制对应的柔性旋翼装置进行角度倾转。
8、工字型主传动机构包括一级齿轮箱,一级齿轮箱的两个动力输出端呈对称状分别设有一级传动臂,且在一级传动臂内通过轴承套装有一级传动轴;
9、一级传动臂的动力输出端设有三通管状结构的二级齿轮箱,二级齿轮箱的两个动力输出端分别呈对称状设有二级传动臂,且在二级传动臂内通过轴承套装有二级传动轴,一级传动轴和二级传动轴之间通过伞齿轮在二级齿轮箱内传动;
10、二级传动臂的动力输出端与三级齿轮箱的动力输入端活动连接,旋翼倾转机构安装在二级传动臂的动力输出端上,并控制对应的柔性旋翼装置进行角度倾转。
11、上旋翼机构和下旋翼机构均包括柔性传动组件、套筒和旋翼桨毂,柔性传动组件包括中间连接构件,中间连接构件的两端分别依次铰接有非平面十字连轴构件和传动轴连接构件, 其中一个传动轴连接构件上固定连接有与二级传动轴传动的主动轴,另一个传动轴连接构件上固定连接有从动轴,从动轴与旋翼桨毂固定连接,套筒安装在三级齿轮箱的动力输出端上,主动轴套装在套筒内,且在主动轴上分别设有与套筒配合的环形凸台和平面轴承;
12、二级传动轴和主动轴之间通过伞齿轮在三级齿轮箱内传动。
13、多自由度平衡机构包括姿态支撑圆盘、姿态控制圆盘和一组连杆控制组件,
14、姿态支撑圆盘固定安装在套筒上,姿态控制圆盘轴承配合安装在从动轴上,并位于旋翼桨毂的底部,
15、连杆控制组件包括依次相铰接的液压油缸、杠杆结构件、第一拉杆和第二拉杆,液压油缸和杠杆结构件分别活动铰接在三级齿轮箱的外壳上,姿态控制圆盘上设有一组弓形结构件,第二拉杆的一端铰接在弓形结构件上,姿态支撑圆盘上设有一组用于对第一拉杆进行限位的拉杆限位孔;
16、二级传动臂的动力输出端设有紧固圆盘,且在紧固圆盘上设有一对分别与两个姿态支撑圆盘连接的紧固拉杆。
17、姿态支撑圆盘和姿态控制圆盘之间设有异形弹簧,异形弹簧套在柔性传动组件上,异形弹簧为中间粗两端细的橄榄形结构。
18、旋翼倾转机构包括倾转电机、减速齿轮组、蜗轮和蜗杆,二级传动臂的动力输出端固定连接有环形连接凸台,且在环形连接凸台上设有倾转托架,倾转电机、减速齿轮组和蜗杆分别安装在倾转托架上,蜗轮固接在三级齿轮箱的动力输入端上,倾转电机通过减速齿轮组带动蜗杆转动,蜗杆与蜗轮配合带动柔性旋翼装置进行角度倾转;
19、环形连接凸台上设有电磁推杆,蜗轮上设有一组与电磁推杆相配合的倾转角度限位孔。
20、本实用新型优点是:气动布局合理,结构先进,动力分配四周的技术特色,能很好的减少旋翼造成的风场扰动干扰低。旋翼的倾转和旋翼姿态控制变距方式独特,可变升力矢量自由度大,反应灵敏,单个旋翼可独立姿态控制,环境动能补偿能力较强。升力系统能将所有旋翼推力的方向控制一致,气动力效力将明显优于现有旋翼飞行器,能适应复杂环境工况条件下的作业,安全稳定高效的特点表现凸出。
技术特征:
1.一种共轴四旋翼飞行器升力系统,其特征在于包括工字型主传动机构(1),工字型主传动机构(1)的四个动力输出端上分别设有柔性旋翼装置以及与柔性旋翼装置对应的旋翼倾转机构(51),
2.根据权利要求1所述的一种共轴四旋翼飞行器升力系统,其特征在于工字型主传动机构(1)包括一级齿轮箱(55),一级齿轮箱(55)的两个动力输出端呈对称状分别设有一级传动臂(56),且在一级传动臂(56)内通过轴承套装有一级传动轴(57);
3.根据权利要求2所述的一种共轴四旋翼飞行器升力系统,其特征在于上旋翼机构(2)和下旋翼机构(3)均包括柔性传动组件(5)、套筒(19)和旋翼桨毂(8),柔性传动组件(5)包括中间连接构件(28),中间连接构件(28)的两端分别依次铰接有非平面十字连轴构件(18)和传动轴连接构件(17), 其中一个传动轴连接构件(17)上固定连接有与二级传动轴(60)传动的主动轴(16),另一个传动轴连接构件(17)上固定连接有从动轴(14),从动轴(14)与旋翼桨毂(8)固定连接,套筒(19)安装在三级齿轮箱(7)的动力输出端上,主动轴(16)套装在套筒(19)内,且在主动轴(16)上分别设有与套筒(19)配合的环形凸台(27)和平面轴承(29);
4.根据权利要求3所述的一种共轴四旋翼飞行器升力系统,其特征在于多自由度平衡机构(4)包括姿态支撑圆盘(20)、姿态控制圆盘(22)和一组连杆控制组件,
5.根据权利要求4所述的一种共轴四旋翼飞行器升力系统,其特征在于姿态支撑圆盘(20)和姿态控制圆盘(22)之间设有异形弹簧(6),异形弹簧(6)套在柔性传动组件(5)上,异形弹簧(6)为中间粗两端细的橄榄形结构。
6.根据权利要求2所述的一种共轴四旋翼飞行器升力系统,其特征在于旋翼倾转机构(51)包括倾转电机(70)、减速齿轮组(71)、蜗轮(72)和蜗杆(73),二级传动臂(59)的动力输出端固定连接有环形连接凸台(75),且在环形连接凸台(75)上设有倾转托架(78),倾转电机(70)、减速齿轮组(71)和蜗杆(73)分别安装在倾转托架(78)上,蜗轮(72)固接在三级齿轮箱(7)的动力输入端上,倾转电机(70)通过减速齿轮组(71)带动蜗杆(73)转动,蜗杆(73)与蜗轮(72)配合带动柔性旋翼装置进行角度倾转;
技术总结
一种共轴四旋翼飞行器升力系统,包括工字型主传动机构(1),工字型主传动机构(1)的四个动力输出端上分别设有柔性旋翼装置以及与柔性旋翼装置对应的旋翼倾转机构(51),本技术优点是:气动布局合理,结构先进,动力分配四周的技术特色,能很好的减少旋翼造成的风场扰动干扰低。旋翼的倾转和旋翼姿态控制变距方式独特,可变升力矢量自由度大,反应灵敏,单个旋翼可独立姿态控制,环境动能补偿能力较强。升力系统能将所有旋翼推力的方向控制一致,气动力效力将明显优于现有旋翼飞行器,能适应复杂环境工况条件下的作业,安全稳定高效的特点表现凸出。
技术研发人员:吴华锋
受保护的技术使用者:阿诺特(湖北)航空科技有限公司
技术研发日:20230518
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!