一种无人机的制作方法
本申请涉及无人机配送,尤其涉及一种无人机。
背景技术:
1、随着技术的发展,无人机配送的应用范围也越来越广泛,通常,无人机设置有传感器,通过传感器对无人机所处的环境进行检测,自动识别无人机飞行路线上的障碍物,并搭配内置高精地图,对无人机的飞行路线进行自动规划。然而当无人机卫星信号失效等紧急情况时,无人机无法对紧急情况进行处理,导致无人机的可靠性较低。
技术实现思路
1、本申请提供了一种无人机,用于提高无人机的可靠性。
2、本申请实施例提供了一种无人机,所述无人机包括:
3、机身;
4、第一传感器组件,所述第一传感器组件设置在所述机身的前方;
5、第二传感器组件,所述第二传感器组件设置在所述机身的下方;
6、其中,所述第一传感器组件和所述第二传感器组件均包括第一人称主视角相机,所述第一传感器组件用于检测所述无人机前方的障碍物,所述第二传感器组件用于检测所述无人机下方的障碍物。
7、在一种可能的实施方式中,所述第一传感器组件还包括双目相机和/或毫米波雷达,所述双目相机和/或所述毫米波雷达设置在所述机身的前方。
8、在一种可能的实施方式中,所述毫米波雷达向所述无人机的上方倾斜,倾斜的角度为8°至12°。
9、在一种可能的实施方式中,所述第二传感器组件还包括双目相机和/或飞行时间相机,所述双目相机和/或所述飞行时间相机设置在所述机身的下方。
10、在一种可能的实施方式中,所述机身包括本体部和吊舱,所述吊舱安装于所述本体部的下方,所述第二传感器组件安装于所述吊舱。
11、在一种可能的实施方式中,所述无人机包括磁罗盘,所述磁罗盘安装于所述吊舱。
12、在一种可能的实施方式中,所述吊舱向所述无人机的前侧倾斜,且倾斜的角度大于2.5°。
13、在一种可能的实施方式中,所述无人机包括第三传感器组件,所述第三传感器组件设置在所述机身的后方,所述第三传感器组件包括双目相机。
14、在一种可能的实施方式中,所述双目相机包括两个摄像头,所述摄像头之间的间距大于95毫米。
15、在一种可能的实施方式中,所述无人机还包括第四传感器组件、第五传感器组件和第六传感器组件中的至少一者,所述第四传感器组件和所述第五传感器组件分别位于所述机身的左侧和右侧,所述第六传感器组件位于所述机身的上方;
16、所述第四传感器组件和所述第五传感器组件分别包括单目相机,所述第六传感器组件包括毫米波雷达。
17、本申请涉及一种无人机,无人机包括机身、设置在机身前方的第一传感器和设置在机身下方的第二传感器组件,第一传感器组件和第二传感器组件分别包括第一人称主视角相机。通过这样的设计可以在无人机无法自主飞行时,使操控手通过第一人称主视角相机采集的图像信息对无人机进行手动控制,以使无人机能够安全飞行或降落至安全位置,从而有利于提高无人机的安全性和可靠性。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
技术特征:
1.一种无人机,其特征在于,所述无人机包括:
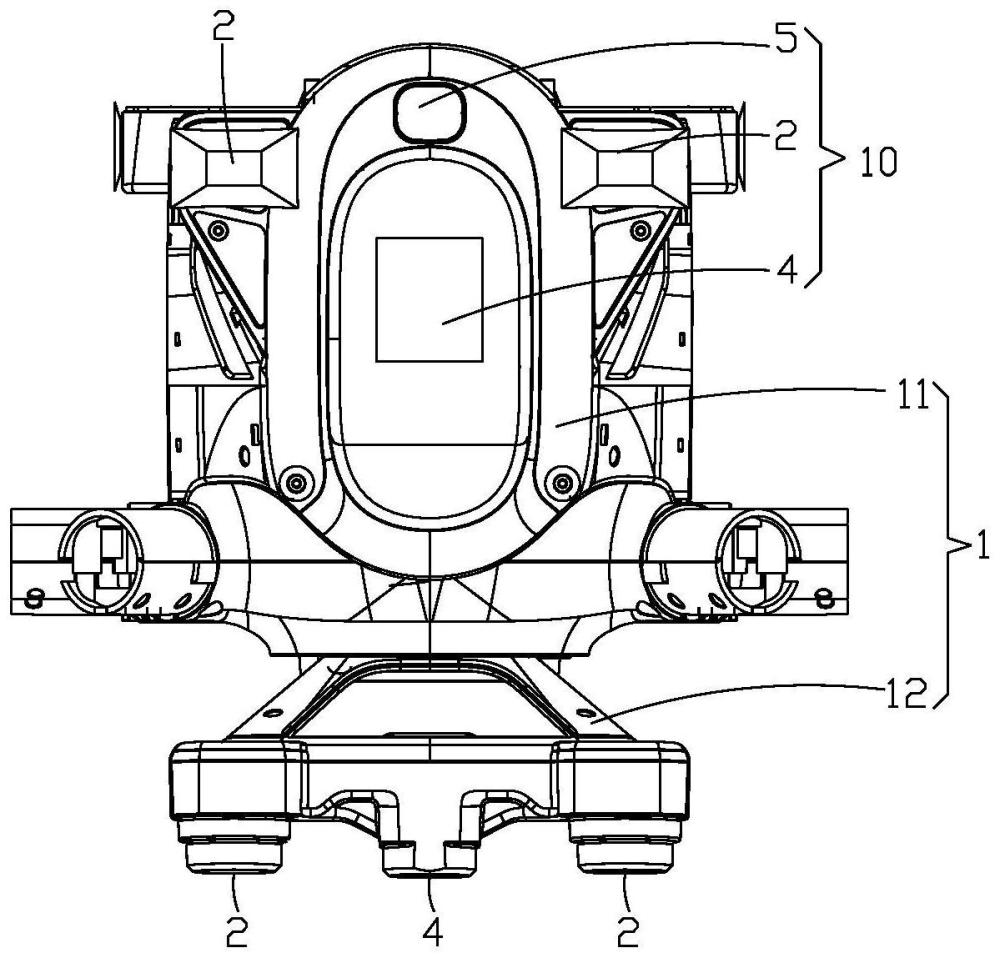
2.根据权利要求1所述的无人机,其特征在于,所述第一传感器组件(10)还包括双目相机(2)和/或毫米波雷达(4),所述双目相机(2)和/或所述毫米波雷达(4)设置在所述机身(1)的前方。
3.根据权利要求2所述的无人机,其特征在于,所述毫米波雷达(4)向所述无人机的上方倾斜,倾斜的角度为8°至12°。
4.根据权利要求1所述的无人机,其特征在于,所述第二传感器组件(20)还包括双目相机(2)和/或飞行时间相机(3),所述双目相机(2)和/或所述飞行时间相机(3)设置在所述机身(1)的下方。
5.根据权利要求4所述的无人机,其特征在于,所述机身(1)包括本体部(11)和吊舱(12),所述吊舱(12)安装于所述本体部(11)的下方,所述第二传感器组件(20)安装于所述吊舱(12)。
6.根据权利要求5所述的无人机,其特征在于,所述无人机包括磁罗盘(6),所述磁罗盘(6)安装于所述吊舱(12)。
7.根据权利要求5所述的无人机,其特征在于,所述吊舱(12)向所述无人机的前侧倾斜,且倾斜的角度大于2.5°。
8.根据权利要求1所述的无人机,其特征在于,所述无人机包括第三传感器组件(30),所述第三传感器组件(30)设置在所述机身(1)的后方,所述第三传感器组件(30)包括双目相机(2)。
9.根据权利要求2至8中任一项所述的无人机,其特征在于,所述双目相机(2)包括两个摄像头,所述摄像头之间的间距大于95毫米。
10.根据权利要求1至7中任一项所述的无人机,其特征在于,所述无人机还包括第四传感器组件(40)、第五传感器组件(50)和第六传感器组件(60)中的至少一者,所述第四传感器组件(40)和所述第五传感器组件(50)分别位于所述机身(1)的左侧和右侧,所述第六传感器组件(60)位于所述机身(1)的上方;
技术总结
本申请涉及一种无人机,无人机包括机身、设置在机身前方的第一传感器和设置在机身下方的第二传感器组件,第一传感器组件和第二传感器组件分别包括第一人称主视角相机。通过这样的设计可以在无人机无法自主飞行时,使操控手通过第一人称主视角相机采集的图像信息对无人机进行手动控制,以使无人机能够安全飞行或降落至安全位置,从而有利于提高无人机的安全性和可靠性。
技术研发人员:雷成志,孟祥争,靖昆鹏,纪秀东,续立军,胡孟
受保护的技术使用者:美团科技有限公司
技术研发日:20230705
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!