一种四同步带驱动式无人机巢归中装置的制作方法
本技术属于无人机,具体为一种四同步带驱动式无人机巢归中装置。
背景技术:
1、当无人机降落在机巢停机平台后,机巢需要将无人机固定在停机坪指定位置以完成对无人机的充电、数据传输、下达指令等功能。由于无人机自动降落算法存在一定的位置偏差以及风速对无人机的降落都有一定影响,所以机巢需要具备归中功能,防止无人机停靠后发生偏离或坠落。但是现在机巢上使用的归中大多都是通过双电机来驱动x轴和y轴来完成归中,双电机驱动会导致如果其中一个电机发生故障,机巢的归中就不能正常进行;双电机驱动的方式后续的维护和保养也会比单电机成本更高。
技术实现思路
1、针对以上问题,本实用新型提供一种四同步带驱动式无人机巢归中装置,采用单电机和四根同步带驱动,传动准确,工作时无滑擦,拥有恒定的传动比,传动效率高,节能明显,具备高强度和高稳定性、结构简单、方便后续维护和保养。
2、为实现上述目的,本实用新型采用的技术方案是:
3、一种四同步带驱动式无人机巢归中装置,包括:
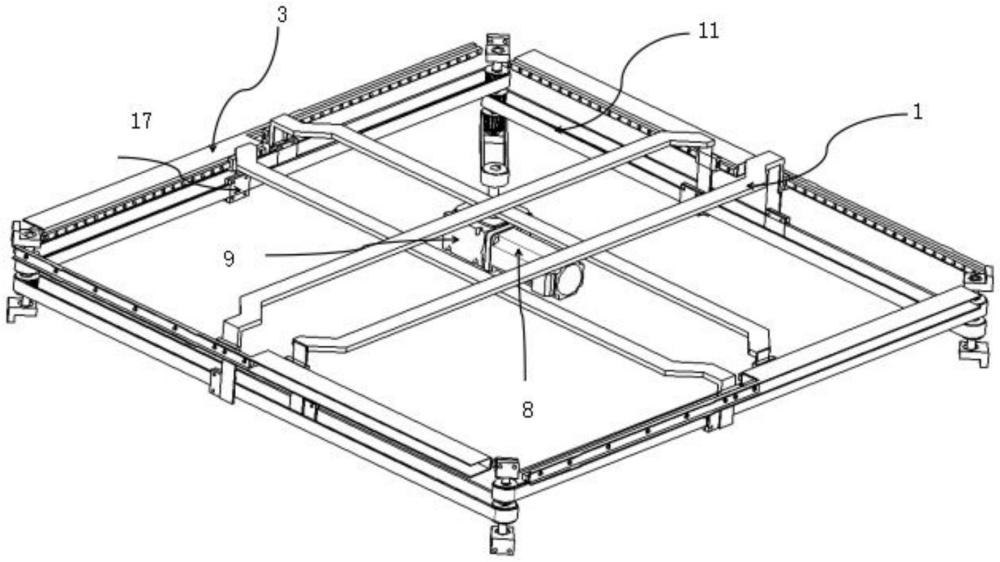
4、箱体外壳:内壁四角竖直安装有旋转轴,旋转轴上设置有同步轮,同一侧的两根旋转轴的同步轮之间挂载有同步带,总共四根同步带组合构成矩形框;箱体外壳内侧面四壁安装有直线滑轨;
5、驱动组件:包括电机及与电机相连的蜗轮蜗杆减速机,蜗轮蜗杆减速机输出轴上设置有驱动轮;驱动轮通过驱动带与其中一个同步轮连接;
6、归中杆:相互交错呈井字形分布构成大小可调的矩形框;每根归中杆两端安装在对应直线滑轨的滑块上;每根归中杆的一端与对应的同步带连接,使得相互平行的两根归中杆移动方向相反。
7、与现有技术相比,本实用新型的有益效果为:
8、1.本装置的传动使用一个单电机来进行传动,采用四套同步带实现四根归中杆的移动,这样使装置的工作效率更加稳定,工作能耗也比多电机低不少,后续也只需要维护一个单机,相对于其他装置维护也更加方便;且传动准确,工作时无滑擦,拥有恒定的传动比,传动效率高,节能明显。
9、2.本装置使用的传动组件中的减速机使用的是蜗轮部件蜗杆减速机相对于其他减速机,蜗轮部件蜗杆减速机拥有机械结构紧凑、体积外形轻巧、小型高效、热交换性能好、散热快、蜗轮部件自锁等优点;
10、3.本装置中使用的电机和蜗轮部件蜗杆减速机在停止工作后,蜗轮蜗杆减速机输出轴停止转动,蜗杆与蜗轮部件的啮合角度大于90度,因此当输入端停止转动时,蜗轮部件会阻止蜗杆的反方向运动,从而能达到动态自锁的效果,来保证归中完成后无人机不会因为外界因素而导致归中杆波动,大大加强了机巢整体的安全性和稳定性。
11、作为上述方案的进一步改进,所述归中杆一端与同步带的外侧带连接,另一端与同步带的内侧带连接;相互平行的两根归中杆的同一端分别与同步带的外侧带和内侧带连接。
12、上述改进的技术效果为:同步带的外侧带和内侧带移动方向刚好相反,通过上述安装方式可以使得同步带驱动两根相互平行的归中杆实现张合运动而互不干涉。
13、作为上述方案的进一步改进,所述旋转轴两端安装在l型带座轴承上,l型带座轴承安装在箱体外壳上。
14、上述改进的技术效果为:便于安装旋转轴。
15、作为上述方案的进一步改进,所述同步带内壁为带齿面;所述同步轮外壁为带齿面;所述同步带内壁与同步轮外壁啮合。
16、上述改进的技术效果为:同步带与同步轮为带齿皮带传动,可以提高传动稳定性和准确性,消除打滑降低误差。
17、作为上述方案的进一步改进,所述驱动带内壁为带齿面;所述驱动轮外壁为带齿面;所述驱动带内壁与驱动轮外壁和同步轮外壁啮合。
18、上述改进的技术效果为:驱动带与驱动轮和同步轮为带齿皮带传动,可以提高电机驱动归中杆移动的准确性和稳定性,消除打滑,降低误差。
19、作为上述方案的进一步改进,所述蜗轮蜗杆减速机包括蜗杆部件和蜗轮部件,蜗轮部件连接输出轴。
20、作为上述方案的进一步改进,所述归中杆两端设置有竖直的安装板,安装板与对应的滑块和同步带连接。
21、上述改进的技术效果为:通过竖直的安装板可以便于归中杆与同步带和滑块的连接。
22、作为上述方案的进一步改进,所述归中杆包括中间为直条状的直杆部,直杆部两端设置有向同一侧折弯的第一折弯部;第一折弯部端头设置有向相反的另一侧折弯的第二折弯部。
23、作为上述方案的进一步改进,同一组的两根归中杆对称设置;且第一折弯部均向内侧设置。
24、上述改进的技术效果为:通过在归中杆两端设置折弯件可以提高归中杆形成的无人机有效停机面积,降低无用面积。
技术特征:
1.一种四同步带驱动式无人机巢归中装置,其特征在于,包括:
2.根据权利要求1所述的一种四同步带驱动式无人机巢归中装置,其特征在于,所述归中杆(1)一端与同步带(11)的外侧带连接,另一端与同步带(11)的内侧带连接;相互平行的两根归中杆(1)的同一端分别与同步带(11)的外侧带和内侧带连接。
3.根据权利要求1所述的一种四同步带驱动式无人机巢归中装置,其特征在于,所述旋转轴(6)两端安装在l型带座轴承(5)上,l型带座轴承(5)安装在箱体外壳(13)上。
4.根据权利要求1所述的一种四同步带驱动式无人机巢归中装置,其特征在于,所述同步带(11)内壁为带齿面;所述同步轮(7)外壁为带齿面;所述同步带(11)内壁与同步轮(7)外壁啮合。
5.根据权利要求1所述的一种四同步带驱动式无人机巢归中装置,其特征在于,所述驱动带(12)内壁为带齿面;所述驱动轮(18)外壁为带齿面;所述驱动带(12)内壁与驱动轮(18)外壁和同步轮(7)外壁啮合。
6.根据权利要求1所述的一种四同步带驱动式无人机巢归中装置,其特征在于,所述归中杆(1)两端设置有竖直的安装板,安装板与对应的滑块(4)和同步带(11)连接。
7.根据权利要求1所述的一种四同步带驱动式无人机巢归中装置,其特征在于,所述归中杆(1)包括中间为直条状的直杆部(101),直杆部(101)两端设置有向同一侧折弯的第一折弯部(102);第一折弯部(102)端头设置有向相反的另一侧折弯的第二折弯部(103)。
8.根据权利要求7所述的一种四同步带驱动式无人机巢归中装置,其特征在于,同一组的两根归中杆(1)对称设置;且第一折弯部(102)均向内侧设置。
技术总结
本技术公布了一种四同步带驱动式无人机巢归中装置,属于无人机技术领域,箱体外壳四角安装有旋转轴,旋转轴上设置有同步轮,同一侧的两根旋转轴的同步轮之间挂载有同步带,总共四根同步带组合构成矩形框;箱体四壁安装有直线滑轨;蜗轮蜗杆减速机输出轴上设置有驱动轮;驱动轮通过驱动带与其中一个同步轮连接;每根归中杆两端安装在对应直线滑轨的滑块上;每根归中杆的一端与对应的同步带连接,使得相互平行的两根归中杆移动方向相反。本技术采用单电机和四根同步带驱动,传动准确,工作时无滑擦,拥有恒定的传动比,传动效率高,节能明显,具备高强度和高稳定性、结构简单、方便后续维护和保养。
技术研发人员:罗靖,叶蔚,黄立佳,伍尚德,邹韩章
受保护的技术使用者:长沙埃比特科技有限公司
技术研发日:20230825
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!