一种稳定快拆固定模组结构的制作方法
本技术涉及无人机,特别涉及一种稳定快拆固定模组结构。
背景技术:
1、使用雷达组件采集相关数据时,通常需要手持雷达组件进行数据采集操作。然而,雷达组件的形状各异,比如有大致为长方体形等形状的;单独使用雷达组件不便于手持操作,因此通常会将雷达组件通过螺丝等固定在一个大致为圆柱形的手柄上;但这种固定方式可靠性较低。
技术实现思路
1、本实用新型的一个目的在于,解决或者缓解上述技术问题。
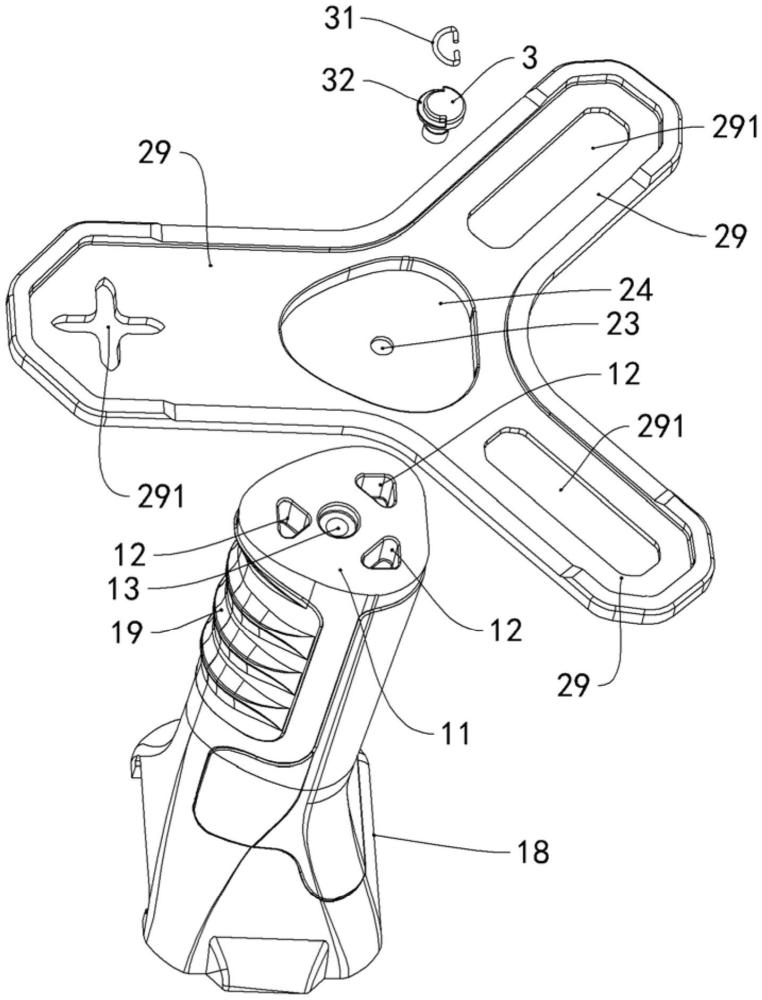
2、本实用新型采取的手段为,一种稳定快拆固定模组结构,包括手柄固定件、底座支撑架以及快拆旋钮;底座支撑架为片状且设置有多个支撑臂,支撑臂均设置有安装孔;手柄固定件包括被限位端,底座支撑架设置有限位凸缘;被限位端的断面为类三角形;被限位端存在与限位凸缘内壁贴合的部分;快拆旋钮穿过底座支撑架与被限位端螺纹连接,使得手柄固定件与底座支撑架可拆连接。
3、本实用新型达到的效果为,便携性较高、可靠性均较高。
4、进一步的技术方案,手柄固定件的与被限位端相对的一端设置有为一直线的放置缘,底座支撑架设置有三个支撑臂,三个支撑臂中的两个为放置用臂,两个放置用臂的一端均位于穿过放置缘的平面上。
5、能够方便地临时放置、拿起雷达组件。
6、进一步的技术方案,放置用臂之间为放置夹角,相邻两个支撑臂之间的夹角中放置夹角最小。
7、支撑臂长度较短而节省材料的前提下,能够确保方便拿起雷达组件。
8、进一步的技术方案,手柄固定件设置有防滑凸起,防滑凸起位于手柄固定件的背对放置缘的一侧。
9、能够确保方便拿起雷达组件。
10、进一步的技术方案,限位凸缘整体为密闭的环状,被限位端与限位凸缘内壁的全部贴合。
11、以提高手柄固定件与底座支撑架连接的牢固程度。
12、进一步的技术方案,被限位端设置有凹槽,限位凸缘内设置有凸起,凸起嵌入凹槽。
13、能够进一步提高手柄固定件、底座支撑架之间的连接强度。
14、进一步的技术方案,凸起为三个且为非旋转对称设置。
15、能够实现防呆。
16、进一步的技术方案,还包括旋转拉环;快拆旋钮的顶端为圆柱形且设置有拉环缺口,旋转拉环与快拆旋钮的顶端铰接且位于拉环缺口内。
17、能够用手直接旋转快拆旋钮,比较方便。
18、进一步的技术方案,底座支撑架设置有沉槽,快拆旋钮的顶端完全位于沉槽内。
19、快拆旋钮的顶端不会干涉雷达组件。
20、进一步的技术方案,手柄固定件内设置有电池。
21、能够提高雷达组件的续航等。
技术特征:
1.一种稳定快拆固定模组结构,其包括手柄固定件(1)、底座支撑架(2)以及快拆旋钮(3);底座支撑架(2)为片状且设置有多个支撑臂(29),支撑臂(29)均设置有安装孔(291);
2.根据权利要求1所述的一种稳定快拆固定模组结构,其特征是,手柄固定件(1)的与被限位端(11)相对的一端设置有为一直线的放置缘(18),底座支撑架(2)设置有三个支撑臂(29),三个支撑臂(29)中的两个为放置用臂(292),两个放置用臂(292)的一端均位于穿过放置缘(18)的平面上。
3.根据权利要求2所述的一种稳定快拆固定模组结构,其特征是,放置用臂(292)之间为放置夹角(293),相邻两个支撑臂(29)之间的夹角中放置夹角(293)最小。
4.根据权利要求1所述的一种稳定快拆固定模组结构,其特征是,手柄固定件(1)设置有防滑凸起(19),防滑凸起(19)位于手柄固定件(1)的背对放置缘(18)的一侧。
5.根据权利要求1所述的一种稳定快拆固定模组结构,其特征是,限位凸缘(21)整体为密闭的环状,被限位端(11)与限位凸缘(21)内壁的全部贴合。
6.根据权利要求1所述的一种稳定快拆固定模组结构,其特征是,被限位端(11)设置有凹槽(12),限位凸缘(21)内设置有凸起(22),凸起(22)嵌入凹槽(12)。
7.根据权利要求6所述的一种稳定快拆固定模组结构,其特征是,凸起(22)为三个且为非旋转对称设置。
8.根据权利要求1所述的一种稳定快拆固定模组结构,其特征是,还包括旋转拉环(31);快拆旋钮(3)的顶端为圆柱形且设置有拉环缺口(32),旋转拉环(31)与快拆旋钮(3)的顶端铰接且位于拉环缺口(32)内。
9.根据权利要求8所述的一种稳定快拆固定模组结构,其特征是,底座支撑架(2)设置有沉槽(24),快拆旋钮(3)的顶端完全位于沉槽(24)内。
10.根据权利要求1所述的一种稳定快拆固定模组结构,其特征是,手柄固定件(1)内设置有电池。
技术总结
本技术涉及无人机技术领域,特别涉及一种稳定快拆固定模组结构,其包括手柄固定件、底座支撑架以及快拆旋钮;底座支撑架为片状且设置有多个支撑臂,支撑臂均设置有安装孔;手柄固定件包括被限位端,底座支撑架设置有限位凸缘;被限位端的断面为类三角形;被限位端存在与限位凸缘内壁贴合的部分;快拆旋钮穿过底座支撑架与被限位端螺纹连接,使得手柄固定件与底座支撑架可拆连接。本技术便携性较高、可靠性均较高。
技术研发人员:李静,张焱
受保护的技术使用者:深圳飞马机器人股份有限公司
技术研发日:20230904
技术公布日:2024/5/9
- 还没有人留言评论。精彩留言会获得点赞!