一种电动变距螺旋桨控制系统
本技术公开涉及电动变距控制,尤其涉及一种电动变距螺旋桨控制系统。
背景技术:
1、飞行器推进系统的设计核心原理是使螺旋桨在整个航行状态下都具有较高的效率,主要是设计完美的控制分配系统能够使螺旋桨最大化的吸收发动机所提供的能量,从而使整个飞行器总效率值最大。提高螺旋桨效率的方法有很多,通过飞行试验发现螺旋桨变距的应用在很大程度上能够提高飞行器的适应能力及改善飞行器吸收螺旋桨的功率。螺旋桨变距的应用提高了推进系统的效率,使飞行器的机动性、长航时性以及整个飞行器系统的总体效率等方面有了很大的提高和改善。
2、定距螺旋桨是指使用过程中桨叶安装角(或桨距)固定的螺旋桨。定距螺旋桨结构简单,重量轻,成本低,维修简单,在小功率的轻型和超轻型飞机上广泛应用。它的主要缺点是不能在各种工作状态下保持最佳性能。一旦螺旋桨牢牢安装于发动机曲轴上,飞行员不能再改变桨叶角度。因此,螺旋桨最大效率只有在特定前进比值时方能获得。以其他速度飞行时.螺旋桨效率总是低于最大值。该特征严格限制了飞行器性能。
3、故提供一种变距螺旋桨控制系统是非常有必要的。
技术实现思路
1、鉴于此,本实用新型公开提供了一种电动变距螺旋桨控制系统,以使螺旋桨在整个航行状态下都具有较高的效率。
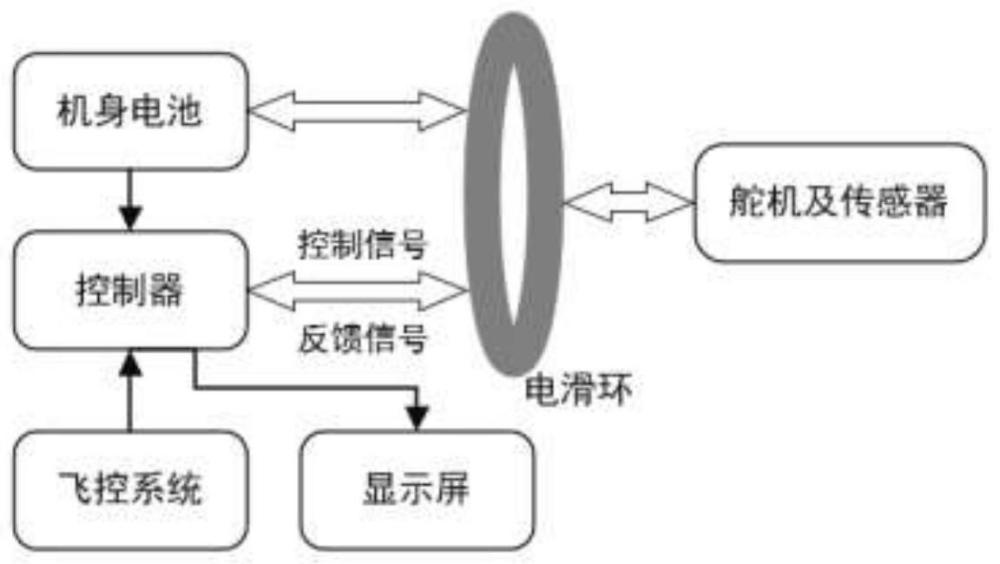
2、本实用新型提供的技术方案,具体为,一种电动变距螺旋桨控制系统,包括控制按键、控制器、电滑环、电动舵机、显示屏、机身电池;所述控制器与电滑环双向信号连接,电滑环与电动舵机双向信号连接,所述控制器与显示屏连接;
3、所述控制按键用于切换螺旋桨的控制模式及飞行状态;
4、所述控制器的程序由飞控系统实现的总体控制。
5、所述控制器根据所述控制模式及飞行状态通过电滑环向电动舵机发送对应的变距控制指令;
6、根据所述变距控制指令,所述电动舵机旋转并提供变桨动力给螺旋桨,并将反馈信号通过电滑环传送给控制器;所述反馈信号包括转动角度、速度、温度、电压;
7、根据所述反馈信号,控制器调节输出的控制信号,显示屏用于显示所述控制信号。
8、进一步地,所述控制器u4的型号为st32f103zet6,所述显示屏的型号为ili9341,所述电滑环的型号为g012-12,所述电动舵机的型号为ms4005v3,所述控制器连接5v电源,电动舵机的输入电压为7-24v。
9、上述系统还包括辅助电源转换电路,所述辅助电源转换电路包括50v-5v转换芯片u1以及5v-3.3v转换芯片u2,其中,所述50v-5v转换芯片u1的输入端与48v机身电池连接,所述5v-3.3v转换芯片u2的输入端与所述50v-5v转换芯片u1的输出端连接;机身电池与48v-24v转换芯片u3连接,降压至24v后连接电滑环从而作为电动舵机的输入。
10、所述控制按键用于切换飞行状态具体为:
11、所述控制按键包括自动/手动控制切换开关s1、顺桨开关s2、巡航开关s3、爬升开关s4和摇杆控制正向开关s5、反向开关s6,所述自动/手动控制开关s1一端与所述控制器u4的pe3脚连接,所述顺桨开关s2一端与所述控制器u4的pg15脚连接,所述巡航开关s3一端与所述控制器u4的pb4脚连接,所述爬升开关s4一端与所述控制器u4的pf12脚连接,所述摇杆控制正向开关s5一端与所述控制器u4的pc13脚连接,所述摇杆控制反向开关s6一端与所述控制器u4的pa0脚连接,以上开关的另一端均与gnd连接。
12、所述控制按键用于切换螺旋桨的控制模式具体为:所述控制模式包括手动控制和自动控制,
13、所述手动控制通过摇杆实现;
14、所述自动控制为:所述控制按键设定顺桨、巡航、爬升三个状态档位开关,其中起降、爬升、顺桨三个档位开关对应固定的变距角度,通过所述三个档位开关调节螺旋桨桨距直至对应的变距角度;所述电动舵机具有反馈信号输出接口,通过所述反馈信号输出接口输出反馈信号,所述反馈信号通过电滑环输送给控制器,依据所述反馈信号增大电动舵机转动角度或减小转动角度;
15、所述顺桨、巡航、爬升三个状态档位开关均具有锁住位置,使飞机螺旋桨桨距当前状态保持不变。
16、所述电动舵机驱动信号采用rs485通信。
17、本实用新型提供的电动变距控制系统具有体积小、重量轻、控制精度高等优点,此外,还具有安全可靠、结构简单、操作使用简便、维修性好、费用低、经济性好等特点。
18、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本实用新型的公开。
技术特征:
1.一种电动变距螺旋桨控制系统,其特征在于,包括控制按键(1)、控制器(2)、电滑环(3)、电动舵机(4)、显示屏(5)、机身电池;所述控制器(2)与电滑环(3)双向信号连接,电滑环(3)与电动舵机(4)双向信号连接,所述控制器(2)与显示屏(5)连接;
2.根据权利要求1所述的一种电动变距螺旋桨控制系统,其特征在于,所述控制器(2)u4的型号为st32f103zet6,所述显示屏(5)的型号为ili9341,所述电滑环(3)的型号为g012-12,所述电动舵机(4)的型号为ms4005v3,所述控制器(2)连接5v电源,电动舵机(4)的输入电压为7-24v。
3.根据权利要求1所述的一种电动变距螺旋桨控制系统,其特征在于,
4.根据权利要求1所述的一种电动变距螺旋桨控制系统,其特征在于,所述控制按键(1)用于切换飞行状态具体为:
5.根据权利要求1所述的一种电动变距螺旋桨控制系统,其特征在于,所述控制按键(1)用于切换螺旋桨的控制模式具体为:所述控制模式包括手动控制和自动控制,
6.根据权利要求1所述的一种电动变距螺旋桨控制系统,其特征在于,所述电动舵机(4)驱动信号采用rs485通信。
技术总结
本技术公开了一种电动变距螺旋桨控制系统,包括控制按键、控制器、电滑环、电动舵机、显示屏、机身电池;所述控制器与电滑环双向信号连接,电滑环与电动舵机双向信号连接,所述控制器与显示屏连接;利用飞控系统实现控制器程序的总体控制。本技术提供的电动变距控制系统具有体积小、重量轻、控制精度高等优点,此外,还具有安全可靠、结构简单、操作使用简便、维修性好、费用低、经济性好等特点。
技术研发人员:赵为平,刘金宝,项松,陈刚,赵锐,张业伟,赵雪莹,陈虹霖,李金龙
受保护的技术使用者:沈阳航空航天大学
技术研发日:20230912
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!