一种车载旋翼无人机起降平台升降装置的制作方法
本技术属于无人机,具体涉及一种车载旋翼无人机起降平台升降装置。
背景技术:
1、当前在无人机的发展与应用中,旋翼无人机在各行各业都得到了广泛的应用,车载旋翼无人机可根据环境态势灵活选择多种作业模式,从而开展通讯距离扩散的任务作业。在人们的生活中越来越多的地方使用到车载旋翼无人机,例如在驾车外出的过程中,可以使用车载旋翼无人机进行前方路况的实时探测,方便驾驶员对行车路径的提前规划,避免拥堵等待及走错路的状况发生;亦可以进行随车伴随飞行作业,对车辆行驶过程进行拍摄记录,提升驾驶的乐趣。
2、目前,车载旋翼无人机的储运都是放在车载无人机储运箱内,旋翼无人机的起飞需要保证旋翼无人机的四周没有障碍物,一般的车载旋翼无人机的储运箱的尺寸不能做的很大,导致储运箱的箱壁限制了旋翼无人机的起飞,现在大多数的旋翼无人机在起飞前需要人为的将旋翼无人机从储运箱中取出,旋翼无人机的放飞过程自动化程度低。另外一些中型旋翼无人机尺寸及重量相对较大,通过人力从储运箱中取出十分不方便,过程比较危险,稍有不当,可能会造成不可避免的损失。
技术实现思路
1、本实用新型的目的在于:解决车载旋翼无人机起降平台的自动化升降问题,提出一种利用连杆机构作动的方法,提高车载旋翼无人机起降平台的自动化水平。
2、本实用新型采用的技术方案如下:
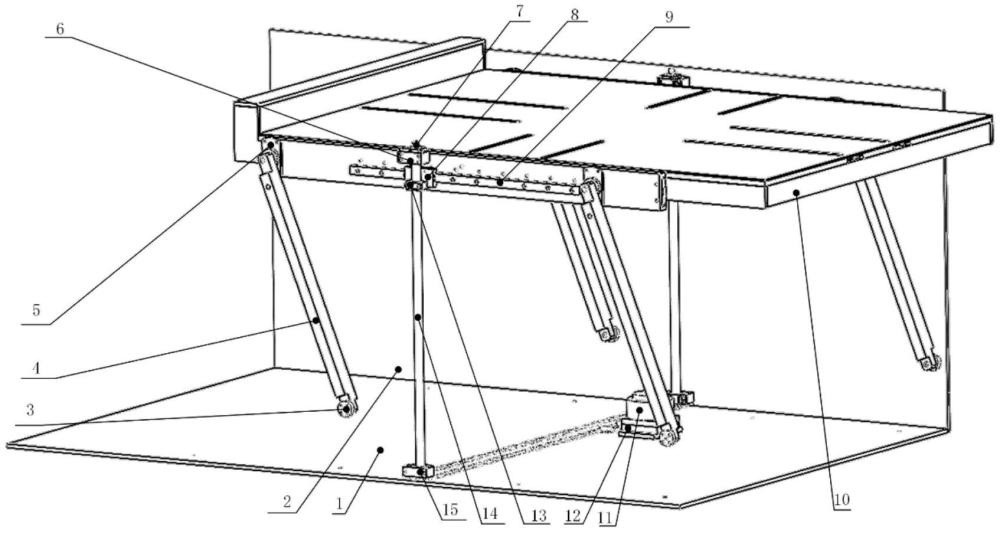
3、本实用新型提供一种车载旋翼无人机起降平台升降装置,包括箱体框架、支撑连杆机构、丝杠提升机构、平移导轨机构、动力装置和起降平台10;
4、所述箱体框架提供结构支撑,箱体框架包括箱体底板1和箱体侧板2,箱体底板1水平放置于底部,所述起降平台10平行设置于箱体底板1正上方,箱体侧板2垂直连接在箱体底板1侧边上;
5、所述支撑连杆机构包括支撑轴3、支撑连杆4和平台支撑轴5;所述支撑轴3对称设置在两个对侧的箱体侧板2内壁上,支撑连杆4一端安装在支撑轴3上,并采用轴用挡圈对支撑连杆4限位,确保支撑连杆4可以绕支撑轴3自由转动;平台支撑轴5安装在支撑连杆4另一端孔内,并采用轴用挡圈对平台支撑轴5限位,确保平台支撑轴5只能在支撑连杆4孔内自由转动;所述平台支撑轴5固定于起降平台10的侧边;
6、所述丝杠提升机构包括丝杠固定座6、丝杠螺母13、t型丝杠14和丝杠支撑座15;所述丝杠固定座6和丝杠支撑座15分别固定在箱体侧板2与起降平台10、箱体底板1相接处侧壁上,且丝杠固定座6和丝杠支撑座15在同一轴线上;t型丝杠14的螺纹端插入丝杠固定座6,d型端插入丝杠支撑座15;
7、所述平移导轨机构包括滑块8和滑轨9;滑轨9安装在起降平台10的侧边上;所述滑块8安装在滑轨9上,确保滑块8可以在滑轨9上自由滑动;丝杠螺母13与t型丝杠14旋合,滑块8与丝杠螺母13连接,使得滑块8随丝杠螺母13一起移动;
8、所述动力装置包括驱动电机11、电机安装架12、丝杠链轮16、电机链轮17、过渡链轮18、过渡链轮轴19和传动链条20;所述驱动电机11安装在电机安装架12上;所述电机链轮17安装在驱动电机11上,所述电机安装架12安装在箱体底板1内侧上,所述过渡链轮18安装在过渡链轮轴19上,采用轴用挡圈限位,过渡链轮18可以在过渡链轮轴19上自由转动;所述过渡链轮轴19安装在箱体底板1内侧上;所述丝杠链轮16安装在t型丝杠14的d型端轴上,采用轴用挡圈限位,丝杠链轮16随t型丝杠14一起转动;所述传动链条20以此绕过丝杠链轮16、电机链轮17和过渡链轮18,使得三个链轮同时转动。
9、优选地,所述t型丝杠14的螺纹端插入丝杠固定座6轴承内圈,确保t型丝杠14的轴肩顶住丝杠固定座6轴承内圈端面,使用固定螺母7将t型丝杠14与丝杠固定座6轴承内圈固连。
10、进一步地,所述固定螺母7安装在t型丝杠螺纹端,使得固定螺母7端面与丝杠固定座6的轴承内圈断面紧贴,丝杠螺母13随t型丝杠14转动。
11、优选地,所述t型丝杠14的d型轴端插入丝杠支撑座15轴承内圈,确保t型丝杠14的轴肩顶住丝杠支撑座15轴承内圈端面,采用轴用挡圈将丝杠支撑座15轴承内圈固定在t型丝杠14上。
12、优选地,所述驱动电机11与电机安装架12通过螺钉固连,利用螺钉将电机链轮17与驱动电机11固连。
13、优选地,所述过渡链轮18安装在过渡链轮轴19上并利用轴用挡圈限位,利用螺钉将过渡链轮轴19固定安装在箱体底板1上。
14、优选地,支撑连杆4安装在支撑轴3上的一端采用轴用挡圈对支撑连杆4限位。
15、优选地,所述起降平台10与平台支撑轴5、滑轨9均通过螺钉固定连接。
16、优选地,所述支撑连杆机构共设置四套,支撑轴3、支撑连杆4和平台支撑轴5均设置四个,两个对侧箱体侧板2上各设置两套。
17、进一步地,所述丝杠提升机构共设置两套,分别位于一侧箱体侧板2两套支撑连杆机构之间。
18、本实用新型工作原理:
19、起降平台上升时,在驱动电机的作用下,通过传动链条带动丝杠链轮转动,丝杠链轮带动t型丝杠转动,进而推动丝杠螺母沿t型丝杠轴线方向提升,进而推动滑块及滑轨向上运动,支撑连杆在此力作用下,绕支撑轴作圆周运动,从而将起降平台提升至所需位置。起降平台下降时,驱动电机反转,其余部件反向运动即可完成动作。本实用新型取得的有益效果:本实用新型提供的带料定距定位装置能够避免定位孔的变形及卡住带料的现象,可对带料实现精准定位,定位销与长条形定位孔的配合修正误差,降低冲压模具定位销的位置对加工精度的影响。
20、本实用新型的有益效果:
21、本实用新型是一种车载旋翼无人机起降平台升降装置,利用t型丝杠推动起降平台做升降运动。该装置提高了旋翼无人机起降平台升降过程中的自动化程度,使得旋翼无人机放飞过程所用时间周期缩短,提高了车载旋翼无人机系统的作业效率,同时采用t型丝杠,利用其自锁特性,可以保证升降平台的位置稳定性。
技术特征:
1.一种车载旋翼无人机起降平台升降装置,其特征在于,包括箱体框架、支撑连杆机构、丝杠提升机构、平移导轨机构、动力装置和起降平台(10);
2.根据权利要求1所述的车载旋翼无人机起降平台升降装置,其特征在于,所述t型丝杠(14)的螺纹端插入丝杠固定座(6)轴承内圈,确保t型丝杠(14)的轴肩顶住丝杠固定座(6)轴承内圈端面,使用固定螺母(7)将t型丝杠(14)与丝杠固定座(6)轴承内圈固连。
3.根据权利要求2所述的车载旋翼无人机起降平台升降装置,其特征在于,所述固定螺母(7)安装在t型丝杠螺纹端,使得固定螺母(7)端面与丝杠固定座(6)的轴承内圈断面紧贴,丝杠螺母(13)随t型丝杠(14)转动。
4.根据权利要求1所述的车载旋翼无人机起降平台升降装置,其特征在于,所述t型丝杠(14)的d型轴端插入丝杠支撑座(15)轴承内圈,确保t型丝杠(14)的轴肩顶住丝杠支撑座(15)轴承内圈端面,采用轴用挡圈将丝杠支撑座(15)轴承内圈固定在t型丝杠(14)上。
5.根据权利要求1所述的车载旋翼无人机起降平台升降装置,其特征在于,所述驱动电机(11)与电机安装架(12)通过螺钉固连,利用螺钉将电机链轮(17)与驱动电机(11)固连。
6.根据权利要求1所述的车载旋翼无人机起降平台升降装置,其特征在于,所述过渡链轮(18)安装在过渡链轮轴(19)上并利用轴用挡圈限位,利用螺钉将过渡链轮轴(19)固定安装在箱体底板(1)上。
7.根据权利要求1所述的车载旋翼无人机起降平台升降装置,其特征在于,支撑连杆(4)安装在支撑轴(3)上的一端采用轴用挡圈对支撑连杆(4)限位。
8.根据权利要求1所述的车载旋翼无人机起降平台升降装置,其特征在于,所述起降平台(10)与平台支撑轴(5)、滑轨(9)均通过螺钉固定连接。
9.根据权利要求1所述的车载旋翼无人机起降平台升降装置,其特征在于,所述支撑连杆机构共设置四套,支撑轴(3)、支撑连杆(4)和平台支撑轴(5)均设置四个,两个对侧箱体侧板(2)上各设置两套。
10.根据权利要求9所述的车载旋翼无人机起降平台升降装置,其特征在于,所述丝杠提升机构共设置两套,分别位于一侧箱体侧板(2)两套支撑连杆机构之间。
技术总结
本技术属于无人机技术领域,具体涉及一种车载旋翼无人机起降平台升降装置。所述车载旋翼无人机起降平台升降装置,包括箱体框架、支撑连杆机构、丝杠提升机构、平移导轨机构、动力装置和起降平台,利用T型丝杠推动起降平台做升降运动。该装置提高了旋翼无人机起降平台升降过程中的自动化程度,使得旋翼无人机放飞过程所用时间周期缩短,提高了车载旋翼无人机系统的作业效率,同时采用T型丝杠,利用其自锁特性,可以保证升降平台的位置稳定性。
技术研发人员:党锴,王伟斌,张庆,李文革,韩伟,赵仁峰,张可,辛忠伟,张宏国,李存利
受保护的技术使用者:西北工业集团有限公司
技术研发日:20231212
技术公布日:2024/8/26
- 还没有人留言评论。精彩留言会获得点赞!