一种基于马格努斯效应的单涵道飞行器
本发明涉及单涵道飞行器,尤其涉及一种基于马格努斯效应的单涵道飞行器。
背景技术:
1、涵道飞行器具有垂直起降、悬停及快速飞行等特征,在各国得以广泛发展研究。涵道飞行器采用的都是涵道内安装旋翼(螺旋桨或风扇)作为升力系统。
2、涵道风扇飞行器具有结构紧凑、机动性能好、环境适应能力较强等优点,并且使用范围已拓展至军事、民用和科研三大领域,由于其发展前景越来越好,逐渐受到了科研人员的关注。涵道无人机的结构包括:环形机翼(涵道)、桨盘、尾舵及机身等。其中环形机翼和风扇在涵道风扇无人机前飞过程中起到了重要作用,整机的飞行驱动力均是由此提供。环形机翼式无人机在铅垂面起飞的时候,是螺旋桨对空气的反作用力和环形机翼的附加推力共同作用的;涵道风扇飞行器前飞过程中的偏航、俯仰和滚转由操控舵面的作用来实现。单涵道飞行器是独立的飞行器,可以实现独立飞行。
3、申请号为cn201010236289.9的发明公开了一种基于马格努斯效应的涵道单螺旋桨飞行器,它涉及一种涵道单螺旋桨飞行器。为了解决现有的共轴双螺旋桨无人飞行器存在安全性差、结构复杂、而且不易实现各种机动的控制的问题。技术要点:所述舵机涵道(i)、气流调整涵道(ii)和动力涵道(iii)三个涵道依次连通,动力装置(3)用于在动力涵道(iii)内产生螺旋形空气流,气流调整装置(2)用于将动力涵道(iii)中的螺旋形空气流转换为垂直喷射形空气流,在舵机涵道(i)中已被调整的垂直喷射形空气流在空芯轮(11)的侧表面上产生马格努斯效应力。该发明以空芯轮旋转时所产生的马格努斯效应力作为控制输入,进而实现各种飞行动作,马格努斯圆筒通过旋转圆柱来控制力的大小,但切换控制力方向时响应慢,控制力较差。
技术实现思路
1、本发明要解决的技术问题是提供一种飞行控制力较强的、基于马格努斯效应的单涵道飞行器。
2、为了解决上述技术问题,本发明采用的技术方案是,一种基于马格努斯效应的单涵道飞行器,包括机架、涵道、动力装置、气流调整装置、舵机装置和控制电路,动力装置和气流调整装置布置在涵道中,舵机装置包括多个舵机单元,多个舵机单元安装在机架上,布置在涵道的下方,并绕涵道的轴线周向均布;舵机单元包括舵机和马格努斯舵片,马格努斯舵片包括舵片、马格努斯圆筒和圆筒驱动电机;舵机安装在机架上,舵片与舵机的舵盘连接,马格努斯圆筒可旋转地安装在舵片顶部的上方,由安装在舵片上的圆筒驱动电机驱动;马格努斯圆筒的轴线与舵片所在的平面平行。
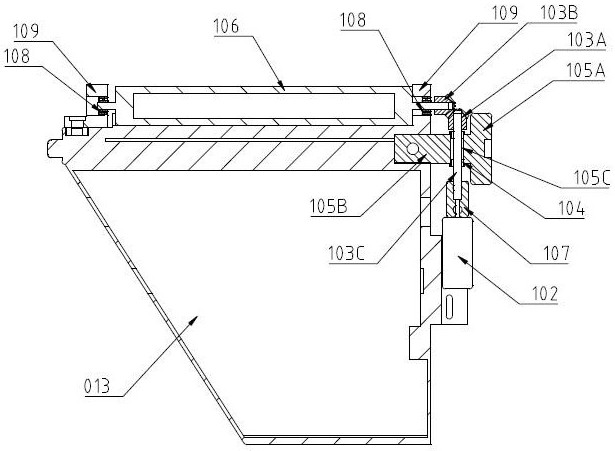
3、以上所述的单涵道飞行器,舵机单元包括两个轴承座、一对锥齿轮和连接器,两个轴承座固定在舵片顶部的上方,马格努斯圆筒两端的轴颈分别由两个轴承座中的轴承支承;连接器包括接盘和连接轴,连接器的接盘与舵机的舵盘连接,连接轴固定在舵片上部的外侧;圆筒驱动电机固定在舵片的外侧,连接轴包括与连接轴正交的轴承孔,第一锥齿轮的齿轮轴穿过连接轴的轴承孔与所述圆筒驱动电机的电机轴连接,第一锥齿轮的齿轮轴由轴承孔中的轴承支承,第二锥齿轮固定在格努斯圆筒外端的轴颈上,第一锥齿轮与第二锥齿轮啮合。
4、以上所述的单涵道飞行器,所述的圆筒驱动电机为空杯电机,第一锥齿轮的齿轮轴通过联轴器与圆筒驱动电机的电机轴连接。
5、以上所述的单涵道飞行器,包括4个所述的舵机单元,所述的机架包括电气平台、4个倒l形骨架和环形的起落架,4个倒l形骨架绕涵道的轴线周向均布;倒l形骨架的上横梁的内端与电气平台连接,倒l形骨架竖杆的下端与环形的起落架连接,构成机架的框架;所述的涵道安装在框架的上部,舵机装置安装在涵道的下方,舵机装置的舵机固定在对应倒l形骨架的竖杆上;涵道的外壁分别与倒l形骨架的竖杆连接,动力装置布置在涵道的上部,气流调整装置布置在涵道的下部;控制电路包括电池和飞行控制板,电池和飞行控制板布置在电气平台上。
6、以上所述的单涵道飞行器,涵道的翼型采用naca2412翼型,扩散角为5°;动力装置包括无刷电机和三叶螺旋桨,三叶螺旋桨通过电机法兰固定在无刷电机的电机轴上,无刷电机固定在电气平台的下方。
7、以上所述的单涵道飞行器,所述的倒l形骨架包括两块倒l形的立板和诸多连接螺栓,两块倒l形的立板通过诸多连接螺栓相互连接;环形的起落架包括环形的圆板和4个缓冲弹簧,两块倒l形的立板的下端通过分别通过弯板与环形的圆板连接;环形的圆板与两块倒l形的立板的连接部位包括弹簧孔,倒l形骨架竖杆的下端包括弹簧座,缓冲弹簧的上端穿过弹簧孔插入到弹簧座中。
8、以上所述的单涵道飞行器,4个所述的舵机单元的舵机分别固定在对应倒l形骨架的两块立板之间;涵道包括无刷电机安装座,无刷电机安装座位于涵道顶部,通过支架固定在涵道内筒壁的上端。
9、以上所述的单涵道飞行器,气流调整装置包括导流筒和安装在导流筒中的复数片导流片;导流片采用be 10305b翼型,攻角为5°;气流调整装置为可拆卸结构,导流筒的外壁包括复数个插板,涵道的下端包括与所述安装片对应的插槽,涵道下端的外壁包括与插槽对应的夹板,导流筒外壁的插板插入到涵道下端的插槽和对应的夹板之间,并与夹板通过螺栓固定连接。
10、本发明基于马格努斯效应的单涵道飞行器舵机单元的马格努斯舵片由舵片和马格努斯圆筒组成,飞行控制力较强。
技术特征:
1.一种基于马格努斯效应的单涵道飞行器,包括机架、涵道、动力装置、气流调整装置、舵机装置和控制电路,动力装置和气流调整装置布置在涵道中,舵机装置包括多个舵机单元,多个舵机单元安装在机架上,布置在涵道的下方,并绕涵道的轴线周向均布;其特征在于,舵机单元包括舵机和马格努斯舵片,马格努斯舵片包括舵片、马格努斯圆筒和圆筒驱动电机;舵机安装在机架上,舵片与舵机的舵盘连接,马格努斯圆筒可旋转地安装在舵片顶部的上方,由安装在舵片上的圆筒驱动电机驱动;马格努斯圆筒的轴线与舵片所在的平面平行。
2.根据权利要求1所述的单涵道飞行器,其特征在于,舵机单元包括两个轴承座、一对锥齿轮和连接器,两个轴承座固定在舵片顶部的上方,马格努斯圆筒两端的轴颈分别由两个轴承座中的轴承支承;连接器包括接盘和连接轴,连接器的接盘与舵机的舵盘连接,连接轴固定在舵片上部的外侧;圆筒驱动电机固定在舵片的外侧,连接轴包括与连接轴正交的轴承孔,第一锥齿轮的齿轮轴穿过连接轴的轴承孔与所述圆筒驱动电机的电机轴连接,第一锥齿轮的齿轮轴由轴承孔中的轴承支承,第二锥齿轮固定在格努斯圆筒外端的轴颈上,第一锥齿轮与第二锥齿轮啮合。
3.根据权利要求1所述的单涵道飞行器,其特征在于,所述的圆筒驱动电机为空杯电机,第一锥齿轮的齿轮轴通过联轴器与圆筒驱动电机的电机轴连接。
4.根据权利要求1所述的单涵道飞行器,其特征在于,包括4个所述的舵机单元,所述的机架包括电气平台、4个倒l形骨架和环形的起落架,4个倒l形骨架绕涵道的轴线周向均布;倒l形骨架的上横梁的内端与电气平台连接,倒l形骨架竖杆的下端与环形的起落架连接,构成机架的框架;所述的涵道安装在框架的上部,舵机装置安装在涵道的下方,舵机装置的舵机固定在对应倒l形骨架的竖杆上;涵道的外壁分别与倒l形骨架的竖杆连接,动力装置布置在涵道的上部,气流调整装置布置在涵道的下部;控制电路包括电池和飞行控制板,电池和飞行控制板布置在电气平台上。
5.根据权利要求4所述的单涵道飞行器,其特征在于,涵道的翼型采用naca2412翼型,扩散角为5°;动力装置包括无刷电机和三叶螺旋桨,三叶螺旋桨通过电机法兰固定在无刷电机的电机轴上,无刷电机固定在电气平台的下方。
6.根据权利要求4所述的单涵道飞行器,其特征在于,所述的倒l形骨架包括两块倒l形的立板和诸多连接螺栓,两块倒l形的立板通过诸多连接螺栓相互连接;环形的起落架包括环形的圆板和4个缓冲弹簧,两块倒l形的立板的下端通过分别通过弯板与环形的圆板连接;环形的圆板与两块倒l形的立板的连接部位包括弹簧孔,倒l形骨架竖杆的下端包括弹簧座,缓冲弹簧的上端穿过弹簧孔插入到弹簧座中。
7.根据权利要求5所述的单涵道飞行器,其特征在于,4个所述的舵机单元的舵机分别固定在对应倒l形骨架的两块立板之间;涵道包括无刷电机安装座,无刷电机安装座位于涵道顶部,通过支架固定在涵道内筒壁的上端。
8.根据权利要求1所述的单涵道飞行器,其特征在于,气流调整装置包括导流筒和安装在导流筒中的复数片导流片;导流片采用be 10305b翼型,攻角为5°;气流调整装置为可拆卸结构,导流筒的外壁包括复数个插板,涵道的下端包括与所述安装片对应的插槽,涵道下端的外壁包括与插槽对应的夹板,导流筒外壁的插板插入到涵道下端的插槽和对应的夹板之间,并与夹板通过螺栓固定连接。
技术总结
本发明公开了一种基于马格努斯效应的单涵道飞行器,包括机架、涵道、动力装置、气流调整装置、舵机装置和控制电路,动力装置和气流调整装置布置在涵道中,舵机装置包括多个舵机单元,多个舵机单元安装在机架上,布置在涵道的下方,并绕涵道的轴线周向均布;舵机单元包括舵机和马格努斯舵片,马格努斯舵片包括舵片、马格努斯圆筒和圆筒驱动电机;舵机安装在机架上,舵片与舵机的舵盘连接,马格努斯圆筒可旋转地安装在舵片顶部的上方,由安装在舵片上的圆筒驱动电机驱动;马格努斯圆筒的轴线与舵片所在的平面平行。本发明舵机单元的马格努斯舵片由舵片和马格努斯圆筒组成,飞行控制力较强。
技术研发人员:巩伟杰,韩芮斌,李宗信,陈宏,郭婷,黄润光,袁俊,郑泽庭,王皓祥,谢文峰,王子剑,付凯华
受保护的技术使用者:深圳大学
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!