一种无人机用双余度舵机控制系统及配置方法与流程
本发明属于电动伺服控制,具体涉及一种无人机用双余度舵机控制系统及配置方法。
背景技术:
1、无人机舵机控制器主要实现对各类舵机的位置随动控制及故障自主切机功能。中大型长航时无人机配套的舵机具有数量多、种类多、工作模式多等特点。现有的舵机控制器硬件灵活性差,没有通用性,不能适应单/双余度舵机工作模式的任意配置,也不能兼容旋转/直线舵机的工作行程等参数;舵机控制器不具备互换性,控制器各通道的硬件参数配置与其相连接的舵机一一对应,必须成套配对使用,不能随意交换;舵机控制器硬件架构不合理,公共部位的单点故障会导致多通道舵机同时故障,故障关联度高,可靠性差。
2、现有的舵机控制器存在硬件架构不合理,通用性及互换性差,可靠性低等问题,难以满足长航时无人机对舵机控制器硬件平台通用化、标准化、高可靠的应用需求。
技术实现思路
1、本发明的目的在于解决无人机舵机控制器硬件架构不合理,通用性及互换性差,可靠性低等问题,提出了一种无人机用双余度舵机控制系统及配置方法。
2、为实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供一种无人机用双余度舵机控制系统,包括m个舵机控制器和n个舵机;
4、m个所述舵机控制器均通过总线与飞管计算机连接,每个所述舵机控制器均具有n个通道,且分别连接n个舵机;n>n,n≥m;
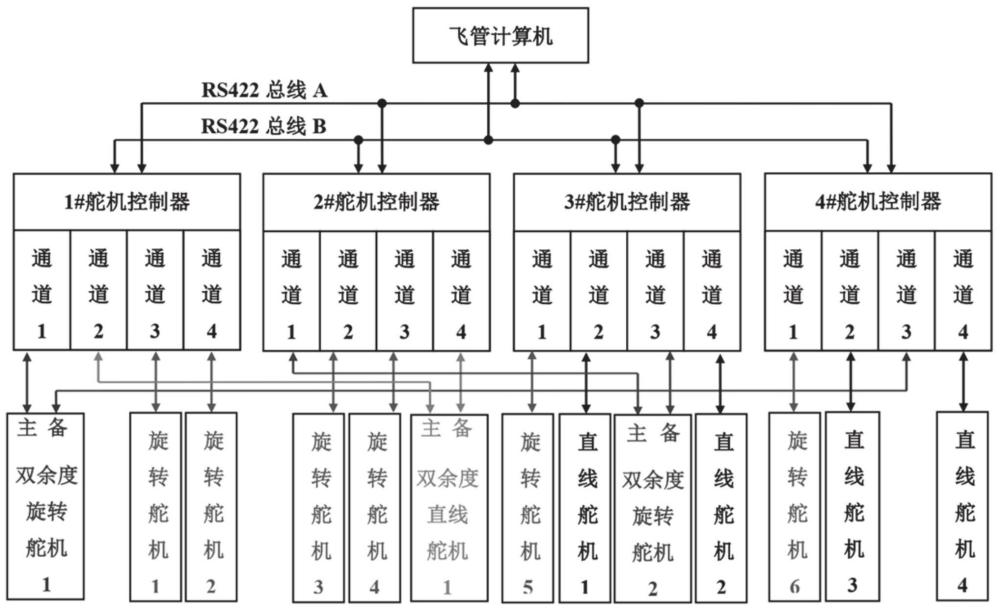
5、所述舵机包括双余度直线舵机、双余度旋转舵机、单余度直线舵机和单余度旋转舵机;其中双余度直线舵机分别连接两个不同舵机控制器的一个通道,双余度旋转舵机均分别连接两个不同舵机控制器的一个通道,单余度直线舵机和单余度旋转舵机均连接对应舵机控制器的一个通道。
6、作为本发明进一步改进,m个舵机控制器通过2路总线接收飞管计算机发送的位置指令信息。
7、作为本发明进一步改进,所述舵机控制器采用双余度同构形式,每个余度均采用dsp+fpga+2路电机驱动ipm模块的一控二架构,分别用于控制2个通道的舵机;
8、所述dsp的输入端连接有物理id识别模块,所述dsp输出端分别连接fpga、切机指令设置模块、传感器类型切换模块;fpga连接电机驱动ipm模块和切机指令设置模块。
9、作为本发明进一步改进,所述两个dsp处理器不交互信息。
10、作为本发明进一步改进,n为4,m为4,n为13,n个舵机具体为1个双余度直线舵机、2个双余度旋转舵机、4个单余度直线舵机和6个单余度旋转舵机。
11、作为本发明进一步改进,第一舵机控制器连接1个双余度旋转舵机、1个双余度直线舵机和2个单余度旋转舵机;
12、第二舵机控制器连接1个双余度旋转舵机、1个双余度直线舵机和2个单余度旋转舵机;
13、第三舵机控制器连接1个双余度旋转舵机、2个单余度直线舵机和1个单余度旋转舵机;
14、第四舵机控制器连接1个双余度旋转舵机、2个单余度直线舵机和1个单余度旋转舵机。
15、第二方面,本发明提供一种无人机用双余度舵机控制系统的配置方法,包括:
16、m个舵机控制器接收飞管计算机发送的位置指令信息,经舵机控制器综合处理后对n个通道的舵机进行位置闭环控制及管理。
17、作为本发明进一步改进,所述经舵机控制器综合处理后对n个通道的舵机进行位置闭环控制及管理,包括:
18、自动识别舵机控制器序号,并根据舵机通道的连接关系,分别配置舵机工作模式、切换传感器匹配参数、设置切机指令的状态,对舵机进行控制和状态监控。
19、作为本发明进一步改进,所述自动识别舵机控制器序号,包括:
20、采用6位数字io信号识别控制器及处理器序号;根据控制器的物理安装位置,通过调整电缆信号的连接状态来设置控制器序号;
21、配置舵机工作模式,包括:
22、工作模式有:单余度、双余度主通道及双余度备通道;单余度工作模式下,舵机为独立单机,不进行切机与被切机;双余度主通道工作模式下,舵机能够在故障后自主发送切机指令;双余度备通道工作模式下,舵机能够接收切机指令并接替主通道工作;
23、采用2组数字io信号配置2路舵机的工作模式;工作模式配置逻辑在fpga中实现;当工作模式为双余度主通道工作或单余度工作,且舵机通道无故障时,打开电机驱动ipm模块的输出,使舵机处于工作状态;当工作模式为双余度备通道工作,且未收到切机指令时,关断电机驱动ipm模块的输出,使舵机处于不工作状态。
24、切换传感器匹配参数,包括:
25、舵机的运动方式有:旋转运动和直线运动,旋转运动舵机采用角位移传感器,直线运动舵机采用线位移传感器;
26、选用2片双路光mos继电器,通过2组数字io信号配置2路舵机传感器的参数,2个数字io信号控制2路光mos继电器的切换,实现对调节激磁信号幅度及舵机位置反馈信号幅度的电阻同时进行切换,使得rvdt和lvdt传感器分别与各自的配置电阻相匹配。
27、设置切机指令的状态,包括:
28、采用主从式热备份工作模式,主备通道的切换由切机指令来控制;选用具有发送和接收使能端的2片差分隔离收发器进行切机指令的发送和接收。
29、采用2组数字io信号配置2路切机指令的接收,2组数字io信号配置2路切机指令的发送;切机指令的接收由dsp处理器来完成,切机指令的发送由fpga来完成。
30、作为本发明进一步改进,所述对舵机进行控制和状态监控包括:
31、根据控制器的物理安装位置,调整连接状态,连接舵机至对应通道,连接切机信号线;
32、第一余度的dsp上电读取物理id后,首先查表确定2路舵机的工作模式和传感器类型,然后dsp配置舵机工作模式、切机指令状态及传感器匹配参数,最后fpga根据舵机工作模式、故障状态,经逻辑综合后进行切机指令设置;
33、第二余度的dsp上电读取物理id后,首先查表确定2路舵机的工作模式和传感器类型,然后dsp配置舵机工作模式、切机指令状态及传感器匹配参数,最后fpga根据舵机工作模式、故障状态,经逻辑综合后进行切机指令设置。
34、相对于现有技术,本发明具有以下有益效果:
35、本发明提出的双余度舵机控制器硬件架构,舵机控制器通过总线与飞管计算机连接,每个舵机控制器均具有多个通道,且分别连接若干个舵机,双余度硬件电路采用双余度同构设计,两个余度无交互,独立工作,结构简单,可靠性高。尤其是能够满足长航时无人机对舵机控制器硬件平台通用化、标准化、高可靠的应用需求。
36、进一步,双余度舵机控制器采用dsp+fpga+2只电机驱动ipm模块的双余度硬件同构设计架构,设计舵机控制器+dsp处理器两级物理id识别、单/双余度舵机工作模式配置、旋转/直线舵机传感器配置参数切换、舵机主备通道切机指令设置等电路,具有结构简单、配置灵活、可靠性高等优点。
37、本发明的配置方法中双余度舵机控制器提供两级物理id识别、单/双余度工作模式配置、舵机传感器类型切换、主备通道切机指令设置等电路模块,硬件配置灵活,通用性和互换性强。
- 还没有人留言评论。精彩留言会获得点赞!