无人机机库、无人机组件和车辆的制作方法
本发明涉及无人机,尤其是涉及一种无人机机库、无人机组件和车辆。
背景技术:
1、目前大多数车载无人机均属于外挂式,仅提供无人机的存放功能,需要人为释放及回收无人机,操作复杂、费时费力、体验感差;无法实现无人机的归中、固定与充电等功能。并且,现有的归中设备绝大部分是利用x和y向两条导轨单次控制无人机的移动,方向单一。无法准确的找到较佳的归中路线,且由于受力的不均,容易导致无人机倾倒,损坏无人机。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的第一个目的在于提出一种无人机机库,可以同步实现无人机的归中和举升。
2、本发明的第二个目的在于提出一种无人机组件,包括上述所述的无人机机库。
3、本发明的第三个目的在于提出一种车辆,包括上述所述的无人机组件。
4、根据本发明第一方面实施例的无人机机库,包括:举升机构、归中机构、驱动机构,所述归中机构设于所述举升机构上且适于随所述举升机构升降;所述驱动机构分别与所述归中机构和所述举升机构驱动连接,所述驱动机构适于驱动所述归中机构对无人机进行归中且驱动所述举升机构升降。
5、根据本发明实施例的无人机机库,通过在无人机机库内设置可同步驱动举升机构和归中机构的驱动机构,以使驱动机构在运动时能够保证举升机构和归中机构同步运动,提高举升机构和归中机构的工作效率,从而使无人机机库具有良好的运转效率,有助于无人机机库的小型化和集成化设计。
6、在一些实施例中,所述归中机构具有归中位置和释放位置,所述驱动机构适于驱动所述举升机构升起且驱动所述归中机构从所述归中位置运动至所述释放位置以释放无人机,所述驱动机构适于驱动所述举升机构下降且驱动所述归中机构从所述释放位置运动至所述归中位置以对无人机进行归中。
7、在一些实施例中,所述驱动机构包括:蜗杆、至少一个驱动齿轮、至少一个驱动齿条,所述蜗杆与所述归中机构配合,所述驱动齿轮设于所述蜗杆上;所述驱动齿条与所述驱动齿轮啮合,所述驱动齿条与所述举升机构配合,当所述蜗杆转动时,所述蜗杆适于驱动所述归中机构对所述无人机进行归中,且驱动所述驱动齿轮与所述驱动齿条啮合以带动所述举升机构升降。
8、在一些实施例中,所述蜗杆位于所述归中机构的一侧,所述驱动齿轮套设在所述蜗杆上,所述驱动齿条设于所述蜗杆的邻近所述举升机构的一侧。
9、在一些实施例中,所述蜗杆上设有蜗杆齿轮,所述蜗杆齿轮与所述归中机构配合;所述驱动齿轮为多个,多个所述驱动齿轮沿所述蜗杆的长度方向分别设在所述蜗杆齿轮的两侧;所述驱动齿条为多个,多个所述驱动齿条分别与多个所述驱动齿轮配合,多个所述驱动齿条与所述举升机构配合。
10、在一些实施例中,所述驱动齿条包括:第一连接段、第二连接段,所述第一连接段的面向所述驱动齿轮的一侧设有多个配合齿,多个所述配合齿与所述驱动齿轮啮合;所述第二连接段的一端与所述第一连接段的邻近所述举升机构的一端相连,所述第二连接段的另一端与所述举升机构配合。
11、在一些实施例中,所述归中机构包括:固定板,所述固定板朝向所述举升机构的一侧设有至少一个导向凸起,所述导向凸起形成有导向槽,所述驱动齿条与所述导向槽导向配合。
12、在一些实施例中,所述的无人机机库还包括:支撑平台,所述举升机构设于所述支撑平台上;所述举升机构包括第一固定杆和第二固定杆,所述第一固定杆与所述归中机构相连,所述第一固定杆的一端形成有第一滑槽,所述驱动机构可移动且可转动地配合在所述第一滑槽内,所述第二固定杆设于所述支撑平台上,所述第二固定杆的一端形成有第二滑槽,所述第一滑槽与所述第二滑槽沿所述举升机构的高度方向相对。
13、在一些实施例中,所述举升机构还包括:第一连杆、第二连杆,所述第一连杆的一端与所述第一滑槽可转动地相连且在水平面内可移动,所述第一连杆的另一端与所述第二固定杆的所述另一端可转动地相连;所述第一连杆和所述第二连杆可转动地相连,所述第二连杆的一端与所述第一固定杆的所述另一端可转动地相连,所述第二连杆的另一端与所述第二滑槽可转动地相连且在水平面内可移动。
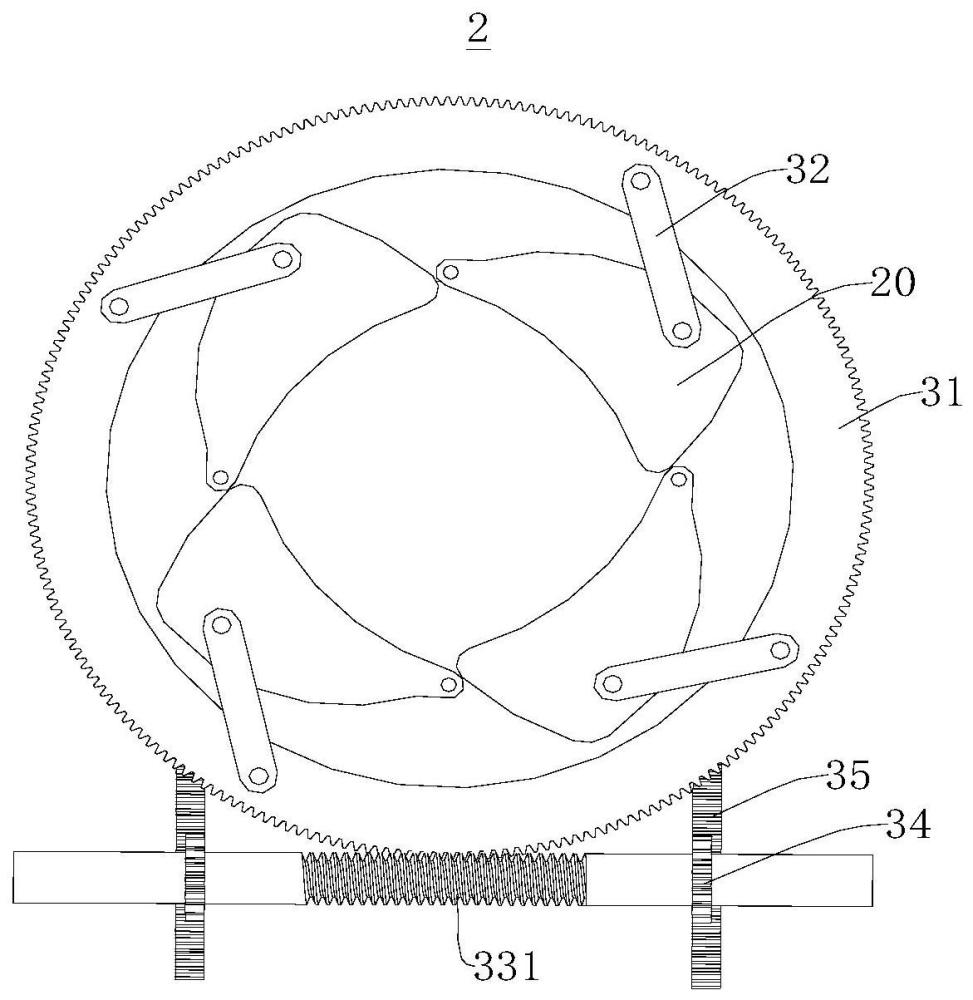
14、在一些实施例中,所述归中机构包括:多个归中件、运动盘,多个所述归中件均设在所述固定板上,多个所述归中件的一端与所述固定板可转动地相连,多个所述归中件沿所述固定板的周向排布;所述运动盘设于所述固定板的外周侧,所述运动盘相对于所述固定板可转动,所述运动盘与所述蜗杆配合,所述运动盘驱动多个所述归中件在释放位置和归中位置之间可运动。
15、在一些实施例中,所述归中机构还包括:多个连杆,多个所述连杆沿所述运动盘的周向间隔设置,多个所述连杆的一端分别与所述归中件相连,多个所述连杆的另一端与所述运动盘相连,所述运动盘与所述归中机构通过所述连杆可转动连接。
16、在一些实施例中,多个所述归中件的另一端分别与多个所述连杆的所述一端配合以带动多个所述归中件的所述另一端绕对应的所述归中件的所述一端转动。
17、在一些实施例中,当多个所述归中件位于所述归中位置时,所述连杆的延伸方向上的中心轴线与所述归中件的受力点和所述归中件的轮廓曲率中心的连线平行或重合。
18、根据本发明第二方面实施例无人机组件,包括:无人机机库、无人机,所述无人机机库为上述实施例所述的无人机机库,所述无人机适于设在所述无人机机库内。
19、在一些实施例中,所述无人机上形成有限位槽,当所述无人机机库的多个归中件位于所述归中位置时所述归中件或连杆与所述限位槽配合以限定所述无人机在上下方向上的运动。
20、根据本发明第三方面实施例的车辆,包括:车体、无人机机库,所述无人机机库为上述实施例所述的无人机机库,所述无人机机库设在所述车体上。
21、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种无人机机库,其特征在于,包括:
2.根据权利要求1所述的无人机机库,其特征在于,所述归中机构具有归中位置和释放位置,
3.根据权利要求1所述的无人机机库,其特征在于,所述驱动机构包括:
4.根据权利要求3所述的无人机机库,其特征在于,所述蜗杆位于所述归中机构的一侧,所述驱动齿轮套设在所述蜗杆上,所述驱动齿条设于所述蜗杆的邻近所述举升机构的一侧。
5.根据权利要求3所述的无人机机库,其特征在于,所述蜗杆上设有蜗杆齿轮,所述蜗杆齿轮与所述归中机构配合;
6.根据权利要求3所述的无人机机库,其特征在于,所述驱动齿条包括:
7.根据权利要求3所述的无人机机库,其特征在于,所述归中机构包括:
8.根据权利要求1所述的无人机机库,其特征在于,还包括:支撑平台,所述举升机构设于所述支撑平台上;
9.根据权利要求8所述的无人机机库,其特征在于,所述举升机构还包括:
10.根据权利要求7所述的无人机机库,其特征在于,所述归中机构包括:
11.根据权利要求10所述的无人机机库,其特征在于,所述归中机构还包括:
12.根据权利要求11所述的无人机机库,其特征在于,多个所述归中件的另一端分别与多个所述连杆的所述一端配合以带动多个所述归中件的所述另一端绕对应的所述归中件的所述一端转动。
13.根据权利要求11所述的无人机机库,其特征在于,当多个所述归中件位于所述归中位置时,所述连杆的延伸方向上的中心轴线与所述归中件的受力点和所述归中件的轮廓曲率中心的连线平行或重合。
14.一种无人机组件,其特征在于,包括:
15.根据权利要求14所述的无人机组件,其特征在于,所述无人机上形成有限位槽,当所述无人机机库的多个归中件位于所述归中位置时所述归中件或连杆与所述限位槽配合以限定所述无人机在上下方向上的运动。
16.一种车辆,其特征在于,包括:
技术总结
本发明公开了一种无人机机库、无人机组件和车辆,无人机机库包括:举升机构、归中机构、驱动机构,所述归中机构设于所述举升机构上且适于随所述举升机构升降;所述驱动机构分别与所述归中机构和所述举升机构驱动连接,所述驱动机构适于驱动所述归中机构对无人机进行归中且驱动所述举升机构升降。根据本发明实施例的无人机机库,通过在无人机机库内设置可同步驱动举升机构和归中机构的驱动机构,以使驱动机构在运动时能够保证举升机构和归中机构同步运动,提高举升机构和归中机构的工作效率,从而使无人机机库具有良好的运转效率,有助于无人机机库的小型化和集成化设计。
技术研发人员:肖冠甲,赵生雷,周建平
受保护的技术使用者:比亚迪股份有限公司
技术研发日:
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!