无人机及其路径规划方法
本发明属于无人机飞行路径规划,具体涉及一种无人机及其路径规划方法。
背景技术:
1、无人驾驶飞行器,简称无人机,是一种使用无线遥控设备和自主程序控制的不载人飞机,或者是由计算机完全或间歇地控制。在民用领域,与载人飞行器相比,无人机由于自身的灵活性、便携性、经济性以及易操作性已经在农业、城管、科研、环保、公安等各个领域都有了广泛的应用。
2、然而,在现阶段的无人机的飞行过程中,一种控制方式是依靠人工控制无人机的飞行,操作人员通过无人机回传的实时视频判断下一时间断是否会与障碍物冲突,并通过手动控制的方式改变航线或者无人机高度,躲避冲突。时刻紧盯实时视频耗费大量人力,并且实时视频的延迟会造成操作不及时,导致严重后果。另一种控制方式中,计算机控制的无人机的飞行路径通常依赖市政的道路规划,无人机沿着规划的道路进行飞行,此种方式下的无人机执行效率较低。
3、因此,设计一种无人机路径规划方法,在目标区域快速搜寻到目标物,并且以最优路线飞行至目标物处。
技术实现思路
1、本发明的目的是提供一种无人机及其路径规划方法,以解决上述的技术问题。
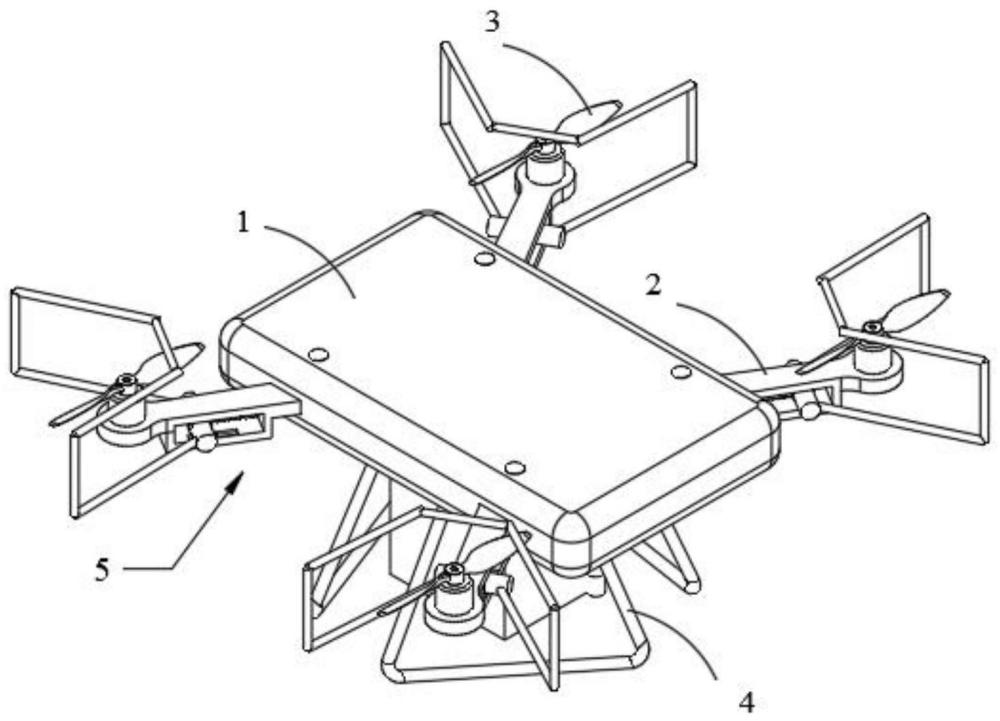
2、为了解决上述技术问题,本发明提供了一种无人机,包括:无人机身以及设置在无人机身四周的机翼连接杆;其中
3、各所述机翼连接杆上均设置有飞行翼;以及
4、机翼防护机构,设置在机翼连接杆上,适于在无人机飞行过程中与障碍物接触时,对飞行翼进行保护;
5、无人机控制端,设置在无人机身下方,分别与飞行翼以及控制模块电性连接,适于接收控制模块发出的姿态调整信号进而控制飞行翼,以带动无人机调整相应飞行姿态。
6、另一方面,本发明还提供了一种无人机飞行路径规划方法,包括如下步骤:
7、步骤s1,创建路径搜索空间模型;
8、步骤s2,建立成本函数,将路径规划问题转为成本函数计算问题,用以对路径最优解进行迭代计算;
9、步骤s3,通过红尾鹰优化算法,进行路径的初始化,建立二维坐标系,将无人机三维路径于二维坐标系中进行投影,从而计算成本函数,通过迭代,完成最优路径的搜索,实现最优路径规划。
10、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书以及附图中所特别指出的结构来实现和获得。
11、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种无人机,其特征在于,包括:
2.如权利要求1所述的无人机,其特征在于,所述机翼防护机构包括:
3.如权利要求2所述的无人机,其特征在于,
4.如权利要求3所述的无人机,其特征在于,
5.一种如权利要求1-4所述的无人机及其路径规划方法,其特征在于,包括如下步骤:
6.如权利要求5所述的路径规划方法,其特征在于,
7.如权利要求6所述的路径规划方法,其特征在于,
8.如权利要求7所述的路径规划方法,其特征在于,
技术总结
本发明属于无人机技术领域,具体涉及一种无人机及其路径规划方法。本装置包括:无人机身以及设置在无人机身四周的机翼连接杆;其中各所述机翼连接杆上均设置有飞行翼;以及机翼防护机构,设置在机翼连接杆上,适于在无人机飞行过程中与障碍物接触时,对飞行翼进行保护;无人机控制端,设置在无人机身下方,分别与飞行翼以及控制模块电性连接,适于接收控制模块发出的姿态调整信号进而控制飞行翼,以带动无人机调整相应飞行姿态;通过设置有机翼防护机构,在无人机朝向目标物飞行的过程中,与路径上障碍物接触时抵消撞击的冲击力,对无人机机翼进行保护;通过RTH算法,实现无人机路径规划。
技术研发人员:李感,张巍,雷富强,陈梦迪,邓清澳,杨文波
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!