一种微纳卫星变轨机动段姿态复合控制方法
本发明属于设计卫星,具体涉及一种微纳卫星变轨机动段姿态复合控制方法。
背景技术:
1、随着技术的发展和导航、天气预报、通信、资源探测等方面需求的增加,航天器小型化成为发展趋势之一。在当前微电子和微机械技术快速发展的背景下,微纳卫星逐渐引起了世界各国的广泛关注。因其具有质量轻、体积小、成本低、研制周期短等显著优势,已广泛应用于包括空间遥感、星座组网、在轨交会对接等民用和军用领域。随着空间任务复杂性不断增加,对微纳卫星变轨能力的需求愈发迫切,然而,变轨期间推力器工作所引起的推力偏心问题会给卫星施加额外的扰动力矩,严重干扰卫星姿态效果。传统的轮控或磁控方法对这种干扰抑制能力极为有限。且由于微纳卫星体积有限,若是在多个方向安装喷口以保证能输出多方向的力矩,将导致推进系统变得非常复杂,严重影响了整体系统的可靠性,增加卫星体积,提高其研制成本。因此,本专利提出利用质量矩技术来仅解决安装单推力器的微纳卫星变轨机动期间无法解决长期推力偏心扰动控制这一技术难点。
2、质量矩技术通过移动系统内活动质量块的位置来改变系统质心的位置,从而调整系统外力矩大小,最终实现期望的姿态控制。质量矩技术仍存在着亟待解决的实际工程问题。质量块运动会改变卫星的转动惯量,并产生与其运动速度、加速度有关的附加力矩扰动,严重干扰卫星姿态控制效果。同时,质量矩执行机构会引入额外的质量配重,降低卫星的效废比,不符合微纳卫星小型化的发展趋势。
技术实现思路
1、本发明的目的在于提供一种微纳卫星变轨机动段姿态复合控制方法,以解决仅安装单推力器的微纳卫星变轨机动期间无法解决长期推力偏心扰动控制的问题。
2、本发明的目的可以通过以下技术方案来实现:一种微纳卫星变轨机动段姿态复合控制方法,步骤如下:
3、第一步:基于零动量轮系和二维平动机构构建复合执行机构。
4、复合执行机构包括零动量轮系和二维平动机构,其中将零动量轮系用为二维平动机构的移动质量,二维平动机构驱动零动量轮系以恒加速运动避免了常规质量矩机构引入额外质量的弊端,与微纳卫星轻量化的发展方向相符,从而在解决推力偏心力矩干扰姿态控制问题。推力偏心力矩是推力矢量延长线不过系统质心造成的,因而可通过调节质心位置或调节推力矢量方向消除推力偏心力矩。相较于矢量喷口方案,调节系统质心位置的方案更为简单,在质量体积受限的微纳卫星上更易实现。当复合执行机构平动至其他位置时,卫星的质心也会发生相应的变化。通过适当调节复合执行机构的位置,即可使得卫星系统质心位于推力矢量的延长线上,从而消除推力偏心力矩。本发明仍利用零动量轮系输出三轴力矩,以此满足姿态高精度控制需求。
5、所述复合执行机构采用零动量轮系作为二维平动机构的单个滑块。在单滑块二维平动布局方式下,当复合执行机构位移延长线不过质心时,其会在x轴上产生较大的扰动力矩,导致滚动轴方向的姿态出现抖动,不利于姿态的稳定控制与星上元器件的正常工作。作为对比,目前业内对质量矩移动质量块的优化布局为双对称布局,双对称布局的滑块在运动时,其在x轴上的附加惯性力矩会被对侧滑块抵消,对姿态控制有利。但由于转化为双对称布局后系统会引入额外平动控制机构,增加了不必要的质量,同时在结构上零动量轮系也难以拆分为四个独立滑块。因此仍采用单滑块二维平动布局,通过设计离散控制算法减缓滑块运动来尽可能减少附加扰动力矩带来的影响。
6、第二步:建立并优化了考虑惯性主轴偏移与附加扰动力矩的卫星姿态动力学模型和复合执行机构的平动动力学模型,具体如下:
7、根据广义动量矩定理,得到惯性系下卫星姿态动力学公式;
8、将式中的姿态动力学方程转化到相对轨道系的形式,本发明在建模过程中假设短时间内卫星变轨不明显,于是有相对于惯性系的角加速度得到相对轨道系的姿态动力学方程;
9、由于复合执行机构相对于星体仅做二维平动,因此只需要二维的平动动力学便可描述其运动,由此可得本体系下复合执行机构的平动动力学方程展开式;
10、系统干扰力矩td主要包括复合执行机构附加扰动力矩与空间环境干扰力矩。空间干扰力矩相较于附加扰动力矩较小,因此主要考虑复合执行机构附加扰动力矩对卫星姿态带来的影响。附加惯性力矩ma主要与质量块位移加速度有关,附加哥氏力矩mc主要与质量块位移速度有关,附加陀螺力矩mg主要与质量块位置有关。
11、常用的姿态运动学方程有基于欧拉角方程与基于四元数方程,其中欧拉角方程设计较多的三角函数运算,仅在小角度下有优势,而四元数描述姿态时要求其模值为1,即存在归一化约束,这限制了其在某些场景下的应用能力,而修正罗德里格斯参数(mrp)可以避免四元数存在的归一化约束,性能更优,因此采用基于修正罗德里格斯参数来描述卫星的姿态。
12、第三步:根据复合执行机构的运动特性设计了指数收敛干扰观测器实时观测推力偏心力矩:
13、由运动模型分析复合执行机构的运动特性可知,卫星系统所受干扰包括推力偏心力矩,滑块附加扰动力矩,空间环境力矩等,其中推力偏心力矩在量级上占主要部分。
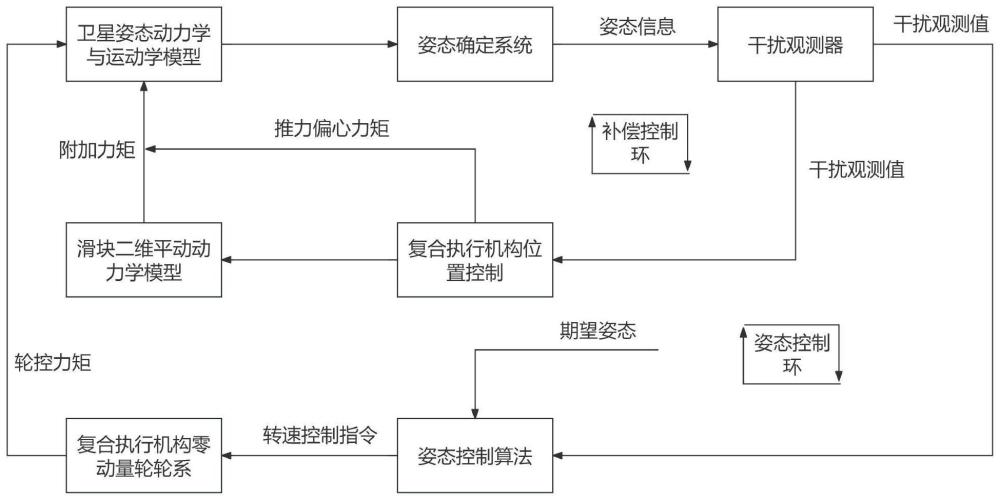
14、考虑到带活动部件微纳卫星的姿态控制耦合性强、模型参数不确定、带有未建模动态等因素,设计了基于指数收敛干扰观测器的双闭环姿态稳定控制。姿态控制环中以零动量轮系为执行机构进行卫星三轴稳定控制,补偿控制环利用质量矩执行机构实时调整卫星系统质心位置最小化推力偏心力矩。同时设计指数收敛干扰观测器估计姿态干扰力矩,一方面用于姿态控制环中避免出现常值偏差,另一方面作为推力偏心力矩补偿环的输入实现复合执行机构的位置控制。注意到,复合执行机构还能够利用推力偏心力矩卸载卫星系统角动量,从而解决动量轮转速饱和问题。
15、第四步:基于指数收敛干扰观测器的双闭环姿态稳定控制,设计了姿态控制环mpc控制器和推力偏心力矩补偿环离散pid控制器,构成了双闭环复合姿态控制系统。
16、针对微纳卫星姿态控制的非线性、多约束等因素,选用线性mpc控制算法设计姿态律,从而在设计层面考虑系统的各个约束条件。
17、其中姿态控制环将卫星姿态动力学模型和复合执行机构的平动动力学模型进行离散化和线性化,设计线性mpc控制器得到动量轮最优控制输入;补偿控制环以推力偏心力矩干扰观测器输出值为pid控制器的输入,以期望的滑块位移作为控制器输出,二维平动机构驱动零动量轮系以恒加速运动完成闭环控制。
18、本发明与现有技术相比,其显著优点在于:
19、(1)所提出的姿态复合控制方法兼具平衡推力偏心力矩与输出高精度姿态控制力矩的能力,提高了微纳卫星在变轨机动段的姿态控制精度,卫星无需额外安装姿态控制推力器,
20、(2)所提出的复合执行机构具备给动量轮系卸载的能力,卫星无需额外安装姿态控制推力器为动量轮卸载,节省了姿控推进剂的消耗;
21、(3)所提出的推力偏心力矩补偿控制环算法可实时对质心进行配平,大幅降低了推进剂消耗对姿轨控系统性能的影响。
技术特征:
1.一种微纳卫星变轨机动段姿态复合控制方法,其特征在于,步骤如下:
2.根据权利要求1中所述的微纳卫星变轨机动段姿态复合控制方法,其特征在于,第二步中,建立并优化考虑惯性主轴偏移与附加扰动力矩的卫星姿态动力学模型,具体如下:
3.根据权利要求2中所述的微纳卫星变轨机动段姿态复合控制方法,其特征在于,第二步中,复合执行机构的平动动力学模型,具体如下:
4.根据权利要求3中所述的微纳卫星变轨机动段姿态复合控制方法,其特征在于,第三步中,根据复合执行机构的运动特性设计指数收敛干扰观测器,以实时观测推力偏心力矩,具体如下:
5.根据权利要求4中所述的微纳卫星变轨机动段姿态复合控制方法,其特征在于,第四步:基于指数收敛干扰观测器,设计姿态控制环mpc控制器和推力偏心力矩补偿离散pid控制器,姿态控制环mpc控制器和推力偏心力矩补偿环离散pid控制器共同构成双闭环复合姿态控制系统,以实现在推力器工作期间卫星的高精度姿态稳定控制,具体如下:
6.根据权利要求5中所述的微纳卫星变轨机动段姿态复合控制方法,其特征在于,第四步中,设计mpc控制算法,具体如下:
7.根据权利要求6中所述的微纳卫星变轨机动段姿态复合控制方法,其特征在于,第四步中,设计复合执行机构位置控制算法,即pid控制算法,具体如下:
技术总结
本发明公开了一种微纳卫星变轨机动段姿态复合控制方法。一种微纳卫星变轨机动段姿态复合控制方法,包括:基于零动量轮系和二维平动机构构建一种新型复合执行机构,建立并优化考虑惯性主轴偏移与附加扰动力矩的姿态转动动力学和滑块平动动力学模型;设计指数收敛干扰观测器实时观测推力偏心力矩;设计姿态控制环MPC(Model Predictive Control)控制器和推力偏心力矩补偿环离散PID(Proportional‑Integral‑Derivative)控制器,构成双闭环复合姿态控制系统。该发明控制方法能有效观测慢时变的推力偏心力矩,具有控制精度高、动量轮系无饱和等特性,适用于微纳卫星变轨机动任务中的长期推力偏心扰动。
技术研发人员:陆正亮,章馨月,程健然,何抒恩,徐伟健,张翔,廖文和
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/10/10
- 还没有人留言评论。精彩留言会获得点赞!