一种配置单翼帆板卫星安全对日方法与流程
本发明涉及航天器姿态控制,更具体地说,涉及一种配置单翼帆板卫星安全对日方法。
背景技术:
1、目前,巨型低轨通信星座发展迅速。为充分利用火箭的运载空间,其卫星构型通常呈现扁平化构型,采用单翼帆板设计。然而,相较于双翼帆板布局卫星,配置单翼帆板卫星存在更易受低轨空间环境干扰力矩影响、惯量特性及出气力矩较大的特点,对于卫星姿态控制,尤其是安全模式下姿态对日,帆板对日是一项严峻挑战。
2、传统卫星姿态安全模式设计一般为磁控自旋对日,该方法通常利用模拟式太阳敏感器、磁强计、陀螺及磁力矩器完成任务,具有占用资源少、能耗低及所用单机可靠的特点。
3、然而如果sada(帆板控制线路及驱动)卡死,无法完成归零动作,则即使卫星姿态完成对日,星上能源仍然无法恢复。此时,如果改变对日轴为非最大惯量轴,姿态将失去稳定,整星安全模式也将不再安全。考虑巨型低轨通信星座地面资源有限,星座卫星应具备足够安全的安全模式设计。否则,对于数千颗卫星地面运营来说,将是一场灾难。
4、前面的叙述在于提供一般的背景信息,并不一定构成现有技术。
技术实现思路
1、本发明的目的在于提供一种配置单翼帆板卫星安全对日方法,该方法加快了磁控对日周期,提高效率,完成姿态对日稳定自旋、保证能源获取,为地面处置留足宝贵时间。
2、本发明提供一种配置单翼帆板卫星安全对日方法,包括以下步骤:
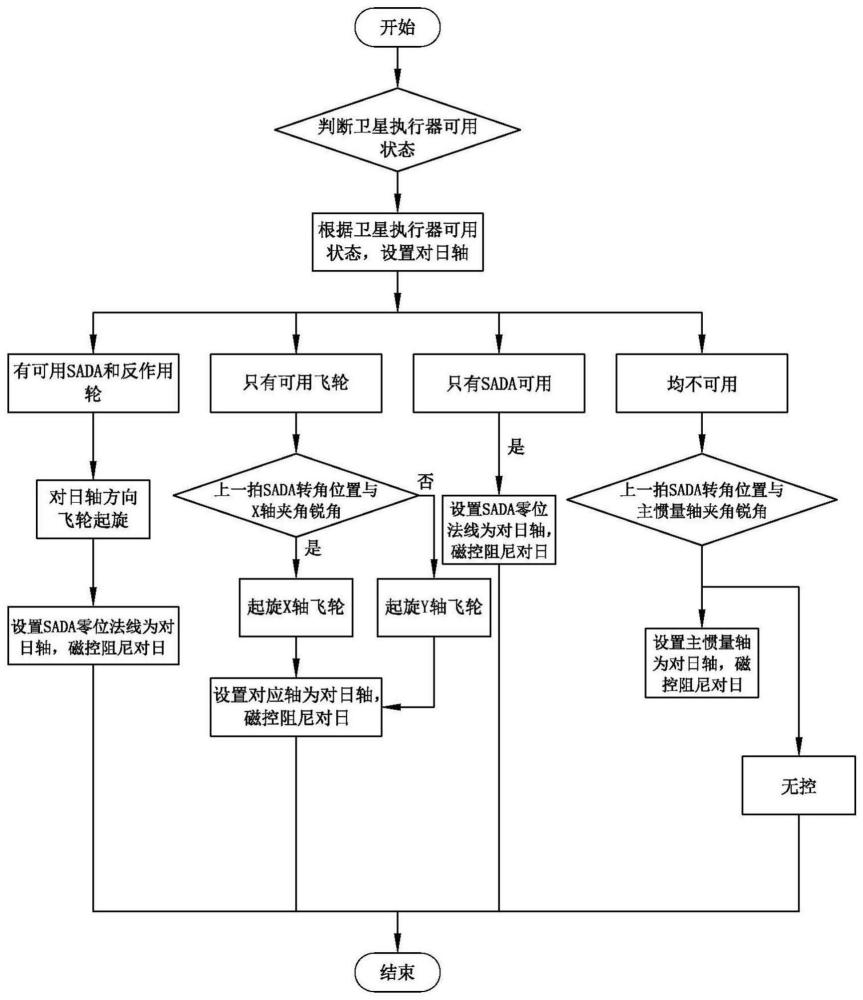
3、s1:判断卫星执行器可用状态;
4、s2:根据所述卫星执行器可用状态,设置对日轴;
5、s3:若星上sada及x/y轴方向反作用轮可用,则sada执行归零动作,对日轴方向反作用轮起旋至+3000rpm,磁力矩器执行磁控对日流程;
6、s4:若星上只有x/y轴方向反作用轮可用,则sada保持原位置,同时,将与帆板法线夹角成锐角的可用反作用轮起旋至3000rpm,对日轴设置为该可用反作用轮方向,磁力矩器执行磁控对日流程;
7、s5:若星上只有sada可用,则sada执行归零动作,对日轴设置为sada零位方向,磁力矩器执行磁控对日流程;
8、s6:若星上sada及反作用轮均不可用,判断sada帆板法线与主惯量轴夹角是否为锐角,若为锐角,对日轴设置为sada零位方向,磁力矩器执行磁控对日流程;否则进入无控模式。
9、进一步地,所述步骤s3、步骤s4、步骤s5以及步骤s6中磁力矩器执行磁控对日流程包括以下步骤:
10、s100:计算太阳指向控制磁矩m1;
11、计算期望力矩tn,
12、
13、其中,tm=(lb)×sb;
14、计算期望力矩与卫星本体系磁场强度夹角,
15、
16、若α<αs或α>pi-αs,置m1为零;否则,计算卫星帆板法线矢量lb轴与太阳矢量夹角β
17、β=acos(sb·lb);
18、其中,sb为卫星本体系太阳矢量;
19、m1=kp·β·(tn×bb);
20、其中,kp为磁控控制比例系数。
21、进一步地,所述步骤s3、步骤s4、步骤s5以及步骤s6中磁力矩器执行磁控对日流程还包括以下步骤:
22、s200:利用角速度计算旋转控制磁矩m2;
23、m2=kd·(bb×ωbi+ωd×bb);
24、其中,bb为卫星本体系地磁场强度,ωbi为卫星惯性系角速度,kd、ωd为磁控控制微分系数、姿态角速度。
25、进一步地,所述步骤s3、步骤s4、步骤s5以及步骤s6中磁力矩器执行磁控对日流程还包括以下步骤:
26、s300:利用磁场强度计算旋转控制磁矩m2;
27、m2=kd·((bb-bpre)/5.0+ωd×bb);
28、其中,bpre为前次(5s前)本体系地磁场强度,前次地磁场强度为无效时,置m2为零。
29、进一步地,所述步骤s3、步骤s4、步骤s5以及步骤s6中磁力矩器执行磁控对日流程还包括以下步骤:
30、s400:计算磁力矩器控制器控制指令mc;
31、mc=-m1-m2。
32、本发明提供的配置单翼帆板卫星安全对日方法,基于卫星常见执行器反作用轮、磁力矩器及sada,充分考虑sada、反作用轮及磁力矩器可用情况,在sada卡死故障下可完成除帆板轴以外的两轴对日,实现最少0.707的光照效率;在sada无故障时,通过对日轴方向起旋可用反作用轮,加快磁控对日周期,提高效率,完成姿态对日稳定自旋、保证能源获取,为地面处置留足宝贵时间。
技术特征:
1.一种配置单翼帆板卫星安全对日方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的配置单翼帆板卫星安全对日方法,其特征在于,所述步骤s3、步骤s4、步骤s5以及步骤s6中磁力矩器执行磁控对日流程包括以下步骤:
3.根据权利要求2所述的配置单翼帆板卫星安全对日方法,其特征在于,所述步骤s3、步骤s4、步骤s5以及步骤s6中磁力矩器执行磁控对日流程还包括以下步骤:
4.根据权利要求3所述的配置单翼帆板卫星安全对日方法,其特征在于,所述步骤s3、步骤s4、步骤s5以及步骤s6中磁力矩器执行磁控对日流程还包括以下步骤:
5.根据权利要求4所述的配置单翼帆板卫星安全对日方法,其特征在于,所述步骤s3、步骤s4、步骤s5以及步骤s6中磁力矩器执行磁控对日流程还包括以下步骤:
技术总结
本发明涉及一种配置单翼帆板卫星安全对日方法,包括判断卫星执行器可用状态;根据所述卫星执行器可用状态,设置对日轴;若星上SADA及X/Y轴方向反作用轮可用,则SADA执行归零动作,对日轴方向反作用轮起旋至+3000Rpm,磁力矩器执行磁控对日流程;若星上只有X/Y轴方向反作用轮可用,则SADA保持原位置,将与帆板法线夹角成锐角的可用反作用轮起旋至3000Rpm,对日轴设置为该可用反作用轮方向,磁力矩器执行磁控对日流程;若星上只有SADA可用,则SADA执行归零动作,对日轴设置为SADA零位方向,磁力矩器执行磁控对日流程;若均不可用,判断SADA帆板法线与主惯量轴夹角是否为锐角,若为锐角,对日轴设置为SADA零位方向,磁力矩器执行磁控对日流程;否则进入无控模式。
技术研发人员:姜松,孙建党,陈夏,黄佳
受保护的技术使用者:上海格思航天科技有限公司
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!