一种输电巡检无人航空器的制作方法
本发明涉及飞行器,尤其涉及一种输电巡检无人航空器。
背景技术:
1、在电力输送系统中,输电塔与输电线的定期巡检是一项不可或缺的任务,旨在确保电力设施的正常运行与安全状态。巡检工作主要包括对输电线是否受到异物附着的细致排查,以及对输电塔是否存在异物堆积或遭受非法攀爬行为的严密监控。当前,多轴旋翼无人机已成为执行此类巡检任务的主流工具,其具备的悬停功能使其能够在特定位置对目标区域进行精准观察与记录,为巡检工作带来了便利性。
2、然而,其飞行过程中产生的风阻较大,由于无人机机体设计所致,飞行时会迎风面积较大,引发较大的空气阻力,这不仅增加了无人机动力系统的能耗,间接缩短了其有效续航时间,还可能导致在强风条件下稳定性下降,影响巡检任务的顺利进行。同时,此类无人机的机身重心通常设置于旋翼下方,虽然这样的布局有利于保持飞行稳定,但在一定程度上牺牲了飞行操控的灵活性。特别是在面对复杂地形环境或需要快速响应、进行高速飞行的情境下,现有无人机的操控性能难以满足高效、敏捷巡检的需求,对其在特殊条件下的任务适应性构成制约。
技术实现思路
1、为了克服现有技术的不足,本发明的目的在于提供一种输电巡检无人航空器,以解决目前的巡检无人机机身飞行阻力大、无法适应高速飞行的问题。
2、本发明的目的采用如下技术方案实现:
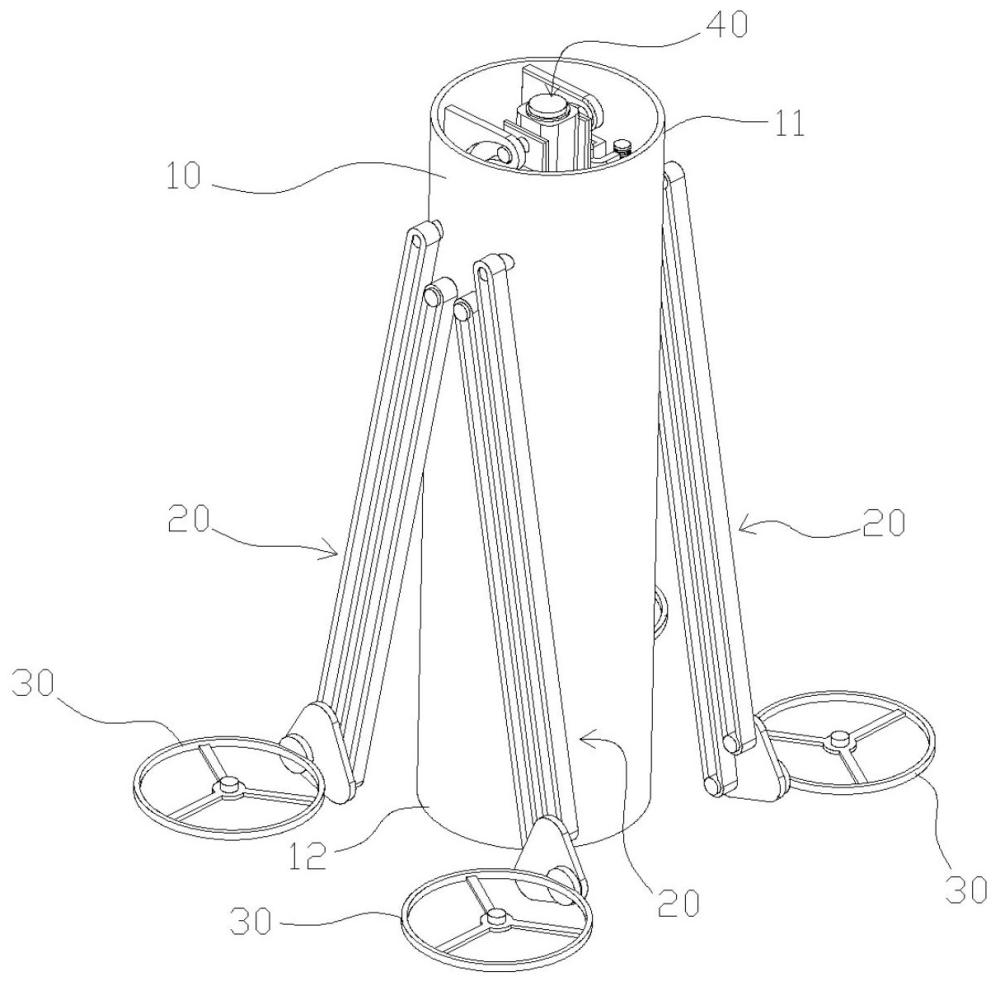
3、一种输电巡检无人航空器,包括机身、机臂和驱动装置;
4、所述机身具有首端和尾端,并沿一参考轴线延伸,所述机身内设有摄像组件,所述摄像组件的至少一部分能够外露于所述首端或所述尾端;
5、所述机臂的一端转动连接于所述机身,所述机臂的另一端转动连接于所述驱动装置,所述机臂具有巡航模式和悬停模式,当所述机臂由所述巡航模式切换至所述悬停模式,所述机臂相对所述机身摆动以使所述驱动装置靠近所述机身的首端;当所述机臂由所述悬停模式切换至所述巡航模式,所述机臂相对所述机身摆动以使所述驱动装置靠近并连接于所述机身的尾端。
6、优选地,所述机身为中空且两端相贯通的筒形,所述机身的内壁面设有平行于所述参考轴线的滑轨,所述摄像组件可滑动地连接于所述滑轨,使所述摄像组件能够沿所述滑轨在所述机身的首端和尾端之间运动,且所述摄像组件能够相对所述滑轨转动。
7、优选地,所述机身设有引导轨道,所述引导轨道包括平行于所述参考轴线的第一引导段以及延伸轨迹呈l形弧线的两个第二引导段,两个所述第二引导段分别位于所述第一引导段的两端,使所述引导轨道呈u形,其中一个所述第二引导段位于所述首端,另一个所述第二引导段位于所述尾端;
8、所述摄像组件设有活动连接于所述引导轨道的所述引导块,所述引导块位于所述摄像组件与所述滑轨之间的转动轴线的一侧;
9、当所述摄像组件沿所述滑轨运动至所述首端时,位于所述首端的所述第二引导段驱动所述摄像组件相对所述滑轨正向转动,使所述摄像组件的图像采集方向朝向所述机身的首端;当所述摄像组件沿所述滑轨运动至所述尾端时,位于所述尾端的所述第二引导段驱动所述摄像组件相对所述滑轨反向转动,使所述摄像组件的图像采集方向朝向所述机身的尾端。
10、优选地,所述机身内设有驱动丝杆;
11、所述摄像组件设有与其转动连接的滑台,所述引导块位于所述摄像组件与所述滑台之间的转轴的侧边;
12、所述滑台可滑动地连接于所述滑轨,所述滑台活动配合连接于所述驱动丝杆。
13、优选地,所述滑轨位于所述引导轨道和所述驱动丝杆之间。
14、优选地,所述机臂包括第一支臂和第二支臂,所述第一支臂的两端分别转动连接于所述机身和所述驱动装置,所述第二支臂的两端分别转动连接于所述机身和所述驱动装置,所述机身、所述第一支臂、所述第二支臂和所述驱动装置之间构成四边形结构,其中,所述第一支臂的长度大于所述第二支臂的长度;
15、当所述机臂处于所述巡航模式时,所述驱动装置的转动平面垂直于所述参考轴线;当所述机臂处于所述悬停模式时,所述驱动装置的转动平面倾斜于所述参考轴线,且所述驱动装置的压力面朝向所述机身的外侧。
16、优选地,所述第一支臂的端部有传动齿轮,两个所述第一支臂的传动齿轮相啮合;
17、所述机身内设有与所述传动齿轮相连接的驱动齿轮,所述驱动齿轮啮合于所述驱动丝杆。
18、优选地,所述机身开设有连通于其内部的让位孔,所述机身内设置有与所述让位孔相邻设置的锁止销,所述锁止销可滑动地连接于所述机身;所述驱动装置靠近所述机身的一侧设有锁止件,所述锁止件设置有锁孔,所述锁止销在所述锁止件穿入所述让位孔时穿设于所述锁孔。
19、优选地,所述机身内设置有锁止机构,所述锁止机构包括弹性件和驱动电磁体,所述弹性件的两端分别连接于所述机身和所述锁止销,所述驱动电磁体用于驱动所述锁止销相对所述机身滑动。
20、优选地,所述摄像组件包括基架、云台和摄像装置,所述基架连接于所述机身,所述摄像装置通过所述云台活动连接于所述基架。
21、相比现有技术,本发明的有益效果在于:
22、机身沿一参考轴线延伸设置,其内部设有摄像组件,摄像组件的一部分能够外露于机身的其中一端,机臂能够带动驱动装置相对机身摆动,机臂处于巡航模式时,机臂驱使驱动装置靠近并连接于机身的尾端,驱动装置位于该无人航空器的重心的下方,有利于提升飞行操控性,飞行速度越快,机身与水平面之间的夹角越小,机身的风阻越小,机臂处于悬停模式时,驱动装置位于该无人航空器的重心的上方,这有利于提升飞行稳定性,悬停更稳定。
技术特征:
1.一种输电巡检无人航空器,其特征在于,包括机身、机臂和驱动装置;
2.根据权利要求1所述的输电巡检无人航空器,其特征在于,所述机身为中空且两端相贯通的筒形,所述机身的内壁面设有平行于所述参考轴线的滑轨,所述摄像组件可滑动地连接于所述滑轨,使所述摄像组件能够沿所述滑轨在所述机身的首端和尾端之间运动,且所述摄像组件能够相对所述滑轨转动。
3.根据权利要求2所述的输电巡检无人航空器,其特征在于,所述机身设有引导轨道,所述引导轨道包括平行于所述参考轴线的第一引导段以及延伸轨迹呈l形弧线的两个第二引导段,两个所述第二引导段分别位于所述第一引导段的两端,使所述引导轨道呈u形,其中一个所述第二引导段位于所述首端,另一个所述第二引导段位于所述尾端;
4.根据权利要求3所述的输电巡检无人航空器,其特征在于,所述机身内设有驱动丝杆;
5.根据权利要求4所述的输电巡检无人航空器,其特征在于,所述滑轨位于所述引导轨道和所述驱动丝杆之间。
6.根据权利要求4所述的输电巡检无人航空器,其特征在于,所述机臂包括第一支臂和第二支臂,所述第一支臂的两端分别转动连接于所述机身和所述驱动装置,所述第二支臂的两端分别转动连接于所述机身和所述驱动装置,所述机身、所述第一支臂、所述第二支臂和所述驱动装置之间构成四边形结构,其中,所述第一支臂的长度大于所述第二支臂的长度;
7.根据权利要求6所述的输电巡检无人航空器,其特征在于,所述第一支臂的端部有传动齿轮,两个所述第一支臂的传动齿轮相啮合;
8.根据权利要求1所述的输电巡检无人航空器,其特征在于,所述机身开设有连通于其内部的让位孔,所述机身内设置有与所述让位孔相邻设置的锁止销,所述锁止销可滑动地连接于所述机身;所述驱动装置靠近所述机身的一侧设有锁止件,所述锁止件设置有锁孔,所述锁止销在所述锁止件穿入所述让位孔时穿设于所述锁孔。
9.根据权利要求8所述的输电巡检无人航空器,其特征在于,所述机身内设置有锁止机构,所述锁止机构包括弹性件和驱动电磁体,所述弹性件的两端分别连接于所述机身和所述锁止销,所述驱动电磁体用于驱动所述锁止销相对所述机身滑动。
10.根据权利要求1所述的输电巡检无人航空器,其特征在于,所述摄像组件包括基架、云台和摄像装置,所述基架连接于所述机身,所述摄像装置通过所述云台活动连接于所述基架。
技术总结
本发明公开了一种输电巡检无人航空器,属于飞行器技术领域,机身沿一参考轴线延伸设置,其内部设有摄像组件,摄像组件的一部分能够外露于机身的其中一端,机臂能够带动驱动装置相对机身摆动,机臂处于巡航模式时,机臂驱使驱动装置靠近并连接于机身的尾端,驱动装置位于该无人航空器的重心的下方,有利于提升飞行操控性,飞行速度越快,机身与水平面之间的夹角越小,机身的风阻越小,机臂处于悬停模式时,驱动装置位于该无人航空器的重心的上方,这有利于提升飞行稳定性,悬停更稳定。
技术研发人员:曲烽瑞
受保护的技术使用者:广东电网有限责任公司广州供电局
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!