空间大尺度桁架式可展开抓捕装置
本发明涉及航空航天领域,具体涉及一种空间大尺度桁架式可展开抓捕装置。
背景技术:
1、空间中的非合作目标具有多样性,这导致抓捕类机构的设计需要针对不同的非合作目标进行调整,然而目前的抓捕机构没有很好的办法对非合作目标进行抓取。此外,在对抓捕机构的运输上,如果使抓捕机构保持展开的姿态进行运输,会增加运输成本,因此在运输时需要抓取机构保持收拢状态,并且尽可能减小其体积,以便运输,所以这就要求设计的抓取机构具有良好的折展比。
2、当前大多数的抓捕机构虽然可以满足展开尺度的要求,但是其收拢状态依然有着较大的尺度,同时其结构过于复杂,对于空间环境下的展开驱动控制技术提出了很高的要求,这显然使没有意义的。并且,抓捕机构需要适应不同的工况条件,这要求抓取机构有足够的刚度,如果刚度不足,在一些工况条件下,会使得机构无法满足实际需求。
3、为解决上述问题,现有技术中提供一些解决方案,例如中国专利文献201810225469.3公开了一种可折展弯曲的空间桁架抓捕机构,其包含基座和安装在基座上的多个可折展弯曲的桁架机构,桁架机构包括n(n≥2)个依次相连的折展单元,折展单元包括两个相互平行设置地三角框,三角框包括一个辊轴和两个侧边,同一折展单元的两个平行侧边之间通过3r支链连接,两个平行辊轴之间通过剪叉机构连接;第n(2≤n≤n)个折展单元底部的三角框和第n-1个折展单元顶部的三角框具有共同辊轴,第n个折展单元底部的两个侧边在弯曲驱动装置的驱动下绕共同辊轴转动,使得多个桁架机构相互靠拢,折展单元在安装于基座上的折展驱动装置的驱动下展开和折叠。
4、然而,现有技术中应用于空间大尺度桁架式可展开抓捕机构依旧存在驱动结构过于冗杂、双自由度机构体积过大以及整体质量较大、抓取过程不稳定较差等诸多不足,难以真正应用在空间非合作目标的抓取任务中。
技术实现思路
1、为至少部分解决现有技术中的不足,本发明的主要目的是提供一种空间大尺度桁架式可展开抓捕装置,其采用双剪叉机构构成并联平台来提升整体刚度,进一步简化结构的同时对驱动系统进行改善,具有结构可靠性高和稳定性好的优点。
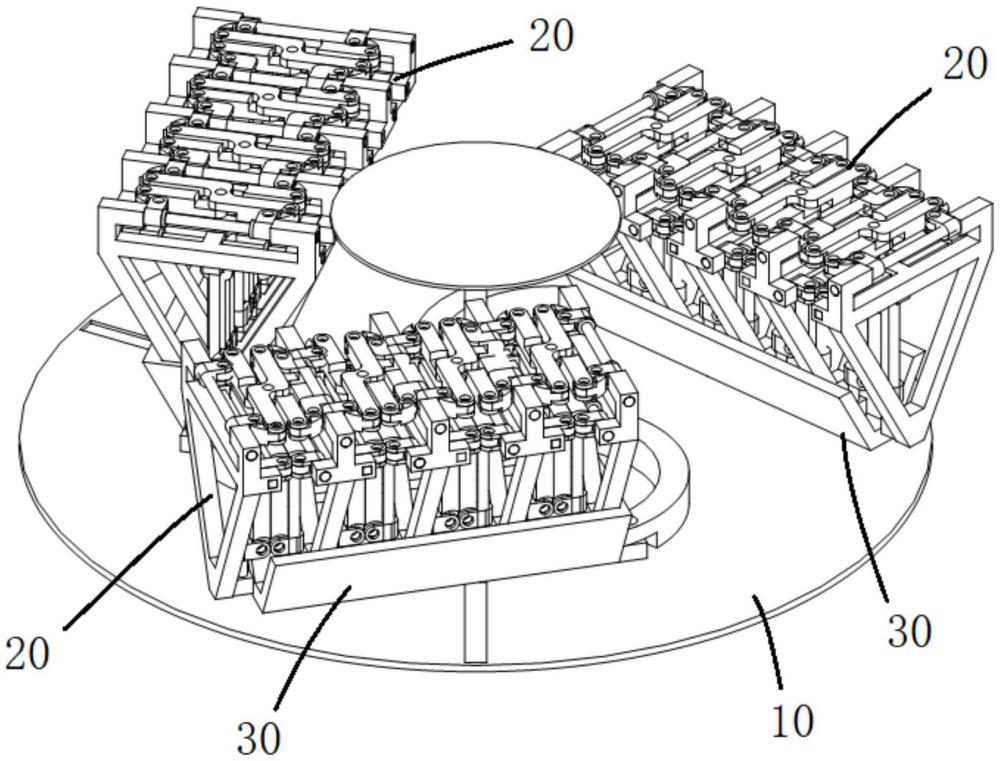
2、为了实现上述主要目的,本发明提供了一种空间大尺度桁架式可展开抓捕装置,包括基座以及安装在基座上的多个可展开的机械手爪;其中,机械手爪包括多个依次连接的折展单元,折展单元包括:
3、上下设置的两个机架,机架上设有第一连接部、设置在第一连接部上的多个第一活动构件、第二连接部以及设置在第二连接部上的多个第二活动构件;第一活动构件可相对于第一连接部在第一方向上进行移动以及围绕第一方向进行旋转,第二活动构件可相对于第二连接部在第二方向上进行移动,其中,第一方向和第二方向互相垂直;
4、双剪叉模块,包括在第二方向上间隔设置的两个剪叉机构;剪叉机构包括两个剪叉杆以及四个转接件,两个剪叉杆的中部通过转动副r1相铰接,转接件通过转动副r2与剪叉杆的端部相铰接并通过转动副r3与第一活动构件相铰接;其中,r1、r2和r3互相平行;
5、支撑机构,包括两个支撑杆,两个支撑杆在第二方向上均位于双剪叉模块的旁侧;其中,紧邻支撑杆的剪叉机构上还设有连接件,支撑杆的一端通过转动副r4与连接件相铰接,支撑杆的另一端通过转动副r5与第二活动构件相铰接;其中,r4和r5互相平行;
6、驱动机构,配置为能够驱使剪叉机构收拢和展开、以及配置为能够驱使两个第二活动构件分别进行移动并使得第一活动构件相对于第一连接部进行旋转而实现两个机架的相对侧翻。
7、根据本发明的一种具体实施方式,相邻折展单元共用同一机架,以使得机械手爪进行单自由度的收拢和展开。
8、根据本发明的一种具体实施方式,转动副r4与转动副r1之间互相垂直。
9、根据本发明的一种具体实施方式,上下两个机架上的两个第二活动构件在同一平面内进行移动,两个支撑杆处于该同一平面内。
10、根据本发明的一种具体实施方式,第一连接部为轴杆状,同一机架上的两个第一连接部在与第一方向、第二方向正交的第三方向上相错开。
11、根据本发明的一种具体实施方式,单个折展单元的抓取角度设置为不超过80°。
12、根据本发明的一种具体实施方式,机械手爪中的折展单元的数目为3-8个。
13、根据本发明的一种具体实施方式,机械手爪的数目为2-6个,多个机械手爪以阵列方式或相对设置方式安装在基座上。
14、根据本发明的一种具体实施方式,基座上设有用于容纳折叠的机械手爪的收纳仓,收纳仓可在位于基座内的隐藏位置与位于基座外的工作位置之间切换。
15、进一步地,基座包括本体、回转体以及传动杆;
16、本体上设有滑动部,收纳仓上设有第三活动构件,第三活动构件可在滑动部内进行移动和自转;
17、回转体设置在本体的中部并可作回转运动,传动杆的一端与回转体固定连接,传动杆的另一端与收纳仓相铰接;其中,回转体回转时可通过传动杆驱动收纳仓在隐藏位置和工作位置之间切换。
18、本发明具备以下有益效果:提供了一种空间大尺度桁架式可展开抓捕装置,包括基座以及安装在基座上的多个可展开的机械手爪,机械手爪包括多个依次连接的折展单元,折展单元采用模块化设计,具体是采用双剪叉机构配合支撑机构所形成的桁架式结构;其中,双剪叉机构所形成的并联平台具体是平行四边形结构,其具有良好的可折展性和单自由度的特性,结构稳定性得到明显提供,同时还有利于布置驱动。
19、本发明具有结构紧凑、可靠性高以及稳定性好的优点,能够适应不同的工况环境,满足抓取非合作目标的实际需求。
20、为了更清楚地说明本发明的目的、技术方案和优点,下面结合附图和具体实施方式对本发明作进一步的详细说明。
技术特征:
1.空间大尺度桁架式可展开抓捕装置,包括基座以及安装在所述基座上的多个可展开的机械手爪;其中,所述机械手爪包括多个依次连接的折展单元,所述折展单元包括:
2.如权利要求1所述的空间大尺度桁架式可展开抓捕装置,其中:相邻所述折展单元共用同一所述机架,以使得所述机械手爪进行单自由度的收拢和展开。
3.如权利要求1所述的空间大尺度桁架式可展开抓捕装置,其中:转动副r4与转动副r1之间互相垂直。
4.如权利要求1所述的空间大尺度桁架式可展开抓捕装置,其中:上下两个所述机架上的两个所述第二活动构件在同一平面内进行移动,两个所述支撑杆处于该同一平面内。
5.如权利要求1所述的空间大尺度桁架式可展开抓捕装置,其中:所述第一连接部为轴杆状,同一所述机架上的两个所述第一连接部在与第一方向、第二方向正交的第三方向上相错开。
6.如权利要求1所述的空间大尺度桁架式可展开抓捕装置,其中:单个所述折展单元的抓取角度设置为不超过80°。
7.如权利要求1所述的空间大尺度桁架式可展开抓捕装置,其中:所述机械手爪中的所述折展单元的数目为3-8个。
8.如权利要求1所述的空间大尺度桁架式可展开抓捕装置,其中:所述机械手爪的数目为2-6个,多个所述机械手爪以阵列方式或相对设置方式安装在所述基座上。
9.如权利要求1所述的空间大尺度桁架式可展开抓捕装置,其中:所述基座上设有用于容纳折叠的所述机械手爪的收纳仓,所述收纳仓可在位于所述基座内的隐藏位置与位于所述基座外的工作位置之间切换。
10.如权利要求9所述的空间大尺度桁架式可展开抓捕装置,其中:所述基座包括本体、回转体以及传动杆;
技术总结
本发明公开了一种空间大尺度桁架式可展开抓捕装置,包括基座和多个机械手爪;机械手爪包括多个依次连接的折展单元,折展单元包括两个机架、双剪叉模块、支撑机构和驱动机构;机架上设有第一连接部、多个第一活动构件、第二连接部以及多个第二活动构件;第一活动构件可相对于第一连接部进行移动和旋转,第二活动构件可相对于第二连接部进行移动;双剪叉模块包括在第二方向上间隔设置的两个剪叉机构;剪叉机构包括两个剪叉杆以及四个转接件,两个剪叉杆的中部通过转动副R1相铰接,转接件通过转动副R2与剪叉杆的端部相铰接并通过转动副R3与第一活动构件相铰接。本发明采用双剪叉机构构成并联平台来提升整体刚度,具有结构可靠性高和稳定性好的优点。
技术研发人员:高长青,王瀚林,赵永杰,吴嘉俊,王土坤
受保护的技术使用者:汕头大学
技术研发日:
技术公布日:2024/8/26
- 还没有人留言评论。精彩留言会获得点赞!