一种倾转旋翼无人机
本申请涉及无人机,尤其涉及一种倾转旋翼无人机。
背景技术:
1、旋翼无人机能够实现不依靠滑跑跑道和其他地面辅助设施垂直起降,但由于其较短的续航能力和较低的飞行速度,使用场景受到一定限制。固定翼无人机能够高速和远距离飞行,然而其需要依靠跑道或地面发射回收设备来辅助起降,这也在一定程度上限制了其适用范围。倾转旋翼无人机融合了两者的优点,不仅能垂直起降,也能高速度和长距离飞行,其可应用于短途运送、医疗救护、航拍、农业植保、观察野生动物、测绘、电力巡检以及航空搜救等任务,因此倾转旋翼无人机被视为未来无人机发展的趋势之一。
2、倾转旋翼无人机在飞行过程中,不同方向、速度或性质的气流,会对其产生相互作用和影响的气流干扰。无人机在飞行过程中,如果受到的气流干扰过大,其飞行姿态和轨迹可能会受到影响,导致无人机偏离预定的飞行路线,甚至失去控制,影响无人机的飞行稳定性和控制性。复杂气流干扰会引起无人机旋翼弹性变形、弹性颤振、结构载荷增加等,引入动态不确定因素,会给无人机的结构带来额外的负担,可能导致无人机部件的损坏或失效。此外,在复杂气流干扰环境下,用于敏感无人机运动状态的导航测量传感器以及用于感知外界环境的环境感知传感器,其测量精度和可靠性将严重受到影响,进而严重限制其导航测量性能。当无人机受到强烈的气流干扰时,可能会失去控制,与障碍物发生碰撞,或者因为结构损坏而坠毁。这些都会给无人机的使用带来极大的风险。
3、现有常规式布局的倾转旋翼无人机,由于机翼升力效应,机翼后方会产生下洗气流,使整个倾转旋翼无人机受到的气流干扰较大。
技术实现思路
1、本申请实施例通过提供一种倾转旋翼无人机,能够解决现有常规式布局的倾转旋翼无人机,由于机翼升力效应,机翼后方会产生下洗气流,使整个倾转旋翼无人机受到的气流干扰较大的问题。
2、为了实现上述目的,本发明实施例的技术方案是:
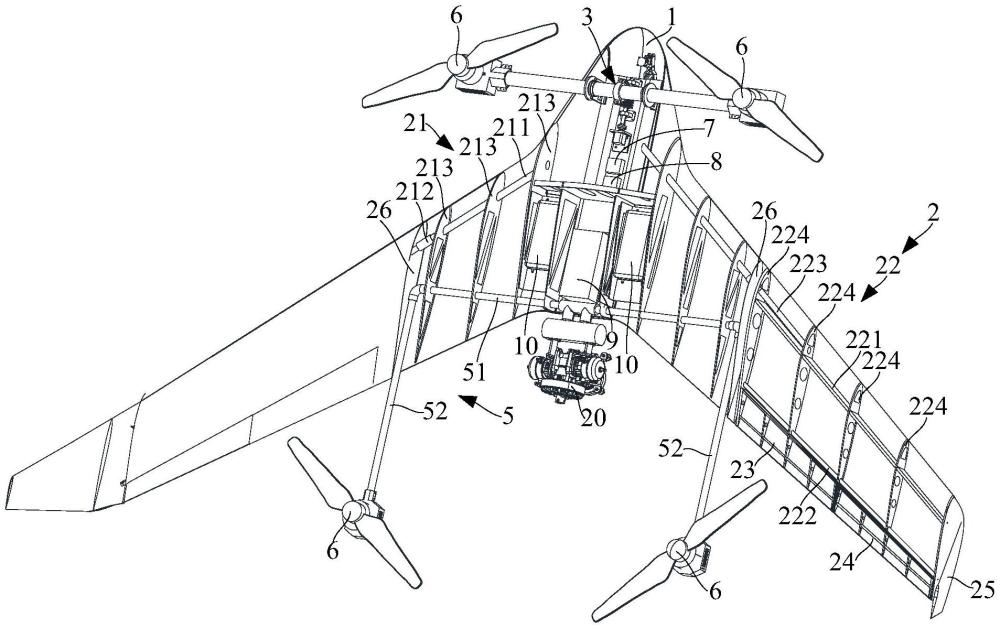
3、本发明实施例提供了一种倾转旋翼无人机,其特征在于,包括机身、机翼、倾转机构、固定架和旋翼;所述机翼为两组,两组所述机翼对称设置于所述机身的对称面的两侧;所述机翼的外壳与所述机身的外壳一体连接;所述倾转机构设置于倾转旋翼无人机的前端,两端分别连接一个所述旋翼,被配置为带动两个所述旋翼同步倾转;所述固定架包括横杆和两根竖杆;所述横杆设置于所述倾转旋翼无人机的后端,中轴线与所述对称面垂直,两端分别与一根竖杆的一端固连,且所述竖杆的中轴线与所述横杆的中轴线垂直;每根所述竖杆的另一端分别连接一个所述旋翼;所述机翼包括内翼、外翼、襟翼、副翼和翼尖小翼;所述内翼、所述外翼和所述翼尖小翼从机身向外的方向依次设置;所述外翼的尾部,从机身向外的方向依次设置所述襟翼和所述副翼;所述襟翼和所述副翼的翼展分别占所述外翼翼展的3/8~1/2,翼弦分别占所述外翼弦长的3/16~1/4。
4、在一种可能的实现方式中,所述倾转机构包括安装板、驱动件、联轴器、蜗杆、轴承座、轴承、涡轮、支座和扭力杆;所述驱动件设置于所述安装板上,输出轴连接所述联轴器的一端;所述联轴器的另一端连接所述蜗杆的一端;所述轴承座设置于所述安装板上,所述轴承的外圈卡设于所述轴承座的安装孔;所述蜗杆的另一端卡设于所述轴承的内孔;所述涡轮与所述蜗杆啮合;所述支座为两个,设置与所述蜗杆的两侧;所述扭力杆穿设于所述涡轮的内孔,两端分别穿出所述支座后连接一个所述旋翼。
5、在一种可能的实现方式中,所述倾转机构还包括卡箍;所述涡轮为180°;所述卡箍包括箍体和固定片;所述箍体包括与所述涡轮的内孔相适配的内壁;两个所述固定片设置于所述箍体的两侧。
6、在一种可能的实现方式中,所述外翼包括第一主梁、副梁、连接梁和第一翼肋;所述第一主梁设置于所述外翼19%~26%弦线处,垂直于自身长度方向的截面为矩形;所述副梁设置于所述外翼65%~70%弦线处;所述连接梁设置于所述第一主梁的前方并伸出所述外翼;所述第一翼肋为多个,多个所述第一翼肋沿所述外翼的长度方向均匀排布。
7、在一种可能的实现方式中,紧邻所述内翼的所述第一翼肋的厚度大于其余所述第一翼肋的厚度。
8、在一种可能的实现方式中,所述第一主梁的前表面的高为后表面的高的1.5~2倍;所述第一主梁的前表面的宽为后表面的宽的1.4~1.6倍。
9、在一种可能的实现方式中,所述内翼包括第二主梁、转接套筒和第二翼肋;所述第二主梁通过所述转接套筒与所述连接梁连接;所述第二翼肋为多个,多个所述第二翼肋沿所述内翼的长度方向均匀排布。
10、在一种可能的实现方式中,紧邻所述机身的所述第二翼肋的厚度大于其余所述第二翼肋的厚度。
11、在一种可能的实现方式中,所述内翼还包括纵板;两根所述第二主梁之间的所述内翼的中部设置所述纵板。
12、在一种可能的实现方式中,所述纵板设置有减重孔。
13、本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
14、本申请实施例提供的倾转旋翼无人机,倾转机构设置于倾转旋翼无人机的前端,两端分别连接一个旋翼,倾转机构能够带动两个旋翼同步倾转。固定架的横杆设置于倾转旋翼无人机的后端,两端分别与一根竖杆的一端固连,每根竖杆的另一端分别连接一个旋翼,从而本申请实施例的倾转旋翼无人机为四旋翼驱动的低速垂直起降无人机,尤其设置于竖杆上的两个旋翼为无人机起飞时提供尾部所需升力。襟翼和副翼的翼展分别占所述外翼翼展的3/8~1/2,翼弦分别占外翼弦长的3/16~1/4,从而襟翼和副翼合作能够提高倾转旋翼无人机产生的滚转力矩,操纵倾转旋翼无人机的偏航运动,进而旋翼、襟翼和副翼的共同作用使本申请实施例的倾转旋翼无人机能够保证倾转旋翼无人机的功能的同时,其为无尾翼的倾转旋翼无人机。而由于本申请实施例的倾转旋翼无人机的无尾翼设计,机翼升力效应使机翼后方产生的下洗气流不会影响机身后部,从而可以减小整个倾转旋翼无人机的气流干扰。同时,倾转机构的设置能够使倾转旋翼无人机的倾转时间极大地降低至0.5s,从而可以忽略倾转过渡段复杂的流场和控制问题。另外,本申请实施例的倾转旋翼无人机的机翼与机身的外壳一体连接以及整体的布局,整个翼面为升力面,升阻比高,可以减少机翼和机身之间的连接部件,简化结构,降低整体重量,从而帮助降低前端的两个旋翼的倾转时间以及倾转旋翼无人机的气流干扰,并且使倾转旋翼无人机的气动效率高。飞翼布局的特殊形状以及无尾翼设计,倾转旋翼无人机的机翼面积减少,减少了几何截面面积,使得飞机具有较低的雷达截面积,有利于隐身性能,降低了被敌方探测的可能性,隐身效果好。
技术特征:
1.一种倾转旋翼无人机,其特征在于,包括机身、机翼、倾转机构、固定架和旋翼;
2.根据权利要求1所述的倾转旋翼无人机,其特征在于,所述倾转机构包括安装板、驱动件、联轴器、蜗杆、轴承座、轴承、涡轮、支座和扭力杆;
3.根据权利要求2所述的倾转旋翼无人机,其特征在于,所述倾转机构还包括卡箍;
4.根据权利要求1所述的倾转旋翼无人机,其特征在于,所述外翼包括第一主梁、副梁、连接梁和第一翼肋;
5.根据权利要求4所述的倾转旋翼无人机,其特征在于,紧邻所述内翼的所述第一翼肋的厚度大于其余所述第一翼肋的厚度。
6.根据权利要求4或5所述的倾转旋翼无人机,其特征在于,所述第一主梁的前表面的高为后表面的高的1.5~2倍;
7.根据权利要求4所述的倾转旋翼无人机,其特征在于,所述内翼包括第二主梁、转接套筒和第二翼肋;
8.根据权利要求7所述的倾转旋翼无人机,其特征在于,紧邻所述机身的所述第二翼肋的厚度大于其余所述第二翼肋的厚度。
9.根据权利要求7或8所述的倾转旋翼无人机,其特征在于,所述内翼还包括纵板;
10.根据权利要求9所述的倾转旋翼无人机,其特征在于,所述纵板设置有减重孔。
技术总结
本申请公开了一种倾转旋翼无人机,属于无人机技术领域。无人机的机翼的外壳与机身的外壳一体连接;倾转机构设置于倾转旋翼无人机的前端,两端分别连接一个旋翼,被配置为带动两个旋翼同步倾转;固定架的横杆设置于倾转旋翼无人机的后端,两端分别与一根竖杆的一端固连;每根竖杆的另一端分别连接一个旋翼;机翼的内翼、外翼和翼尖小翼从机身向外的方向依次设置;外翼的尾部,从机身向外的方向依次设置襟翼和副翼;襟翼和副翼的翼展分别占外翼翼展的3/8~1/2,翼弦分别占外翼弦长的3/16~1/4。本申请的机翼升力效应使机翼后方产生的下洗气流不会影响机身后部,从而可以减小整个倾转旋翼无人机的气流干扰。
技术研发人员:李文,闫兆武,贾栋,罗明,庄淡盛
受保护的技术使用者:南昌航空大学
技术研发日:
技术公布日:2024/7/25
- 还没有人留言评论。精彩留言会获得点赞!