无人机巡线自主续航装置及方法
本发明涉及飞行器续航,特别涉及一种无人机巡线自主续航装置及方法。
背景技术:
1、在当今电力线路的运行维护中,无人机巡线已经成为一项重要的工作手段。然而,由于无人机电池容量的限制,无人机根据预先给定的巡航路线和偏好程序进行巡线时,续航问题往往是跟不上的,因此导致无人机只能在有限时间内走一部分规划路线,即飞行时间和距离都受到了影响,这导致了需要频繁的往返充电,类似于“在河边行走,却无水可喝”的尴尬情况。这种情况在一定程度上降低了无人机巡线的效率。
2、为了解决无人机续航问题,日本千叶大学科研团队在2014年研制了一款无人机机巢原型,可实现无人机电池更换与充电。在此后,由于无人机巡检在架空线路、石油及天然气管道等多个领域有续航需求,国内外有越来越多的科研机构和高新技术企业着力于研究无人机“巢-巢”巡检模式。
3、目前在部分电网单位已经投入使用的基础版本无人机机巢属于固定机巢,通过电网单位给机巢充电仓供电,无人机在巡检完毕后需要留出足以返回大本营的电量。而第二阶段升级版则有移动式“巢-巢”巡检模式和蛙跳式“巢-巢”巡检模式。如图1所示,移动式“巢-巢”巡检模式一般以车载智能机巢为主,车载智能机巢相当于是一个给无人机充电的大型“充电宝”,电网公司事先规划好无人机巡检线路,让车载智能机巢提前到一些线路点候机,无人机巡检完一段线路后就可以在车载智能机巢引导下降落更换电池或者充电。这种方法适合于无人机较少的场合,只需要配车协同即可。但随着各大电网公司在无人机巡检上投入的增加,移动式“巢-巢”巡检模式显然已有他的时代局限性。
4、而传统的蛙跳式“巢-巢”巡检模式缺点也很明显,首先在无人机较少的情况下大力建设杆塔端无人机机巢一定是耗时耗力性价比不高的,其次传统蛙跳式“巢-巢”巡检模式需要另准备充电设施给无人机机巢充电,这个另准备的充电设施作为“大型充电宝”在恶劣天气下掉电也会比较明显,还需要频繁从高塔上调配“大型充电宝”,操作起来十分繁琐,因此大多情况下认为传统的蛙跳式“巢-巢”巡检模式不太可行。
技术实现思路
1、本发明提供一种无人机巡线自主续航装置及方法,以解决现有无人机续航方式需要另准备充电设施给无人机机巢充电,操作繁琐且耗时耗力等问题。
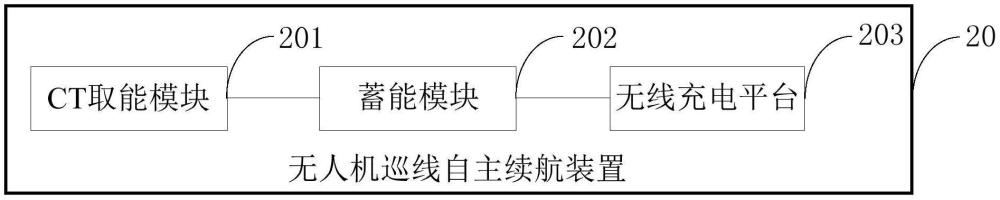
2、本发明第一方面实施例提供一种无人机巡线自主续航装置,包括:ct取能模块,所述ct取能模块设置在目标杆塔的输电线路上,并与所述输电线路连接,以获取所述输电线路上的电能;蓄能模块,所述蓄能模块与所述ct取能模块连接,以储存所述电能;无线充电平台,所述无线充电平台设置在所述目标杆塔的架空线路上,以通过无线电能传输接收所述电能,并将所述电能传导至目标无人机。
3、可选地,所述ct取能模块包括开气隙磁芯和匹配电容,其中,所述开气隙磁芯套接在所述输电线路上,所述开气隙磁芯的线圈两侧连接所述匹配电容。
4、可选地,所述蓄能模块包括整流电路、dc-dc电路、取能负载和充放电管理电路,其中,所述整流电路通过变压器与所述ct取能模块连接,所述dc-dc电路与所述整流电路连接,所述取能负载与所述dc-dc电路连接,所述充放电管理电路与所述取能负载连接。
5、可选地,所述蓄能模块控制所述取能负载的输入阻抗与所述ct取能模块的阻抗相匹配,以从所述输电线路获取所述电能。
6、可选地,所述无线充电平台为呈正方体的无人机机巢,在所述无人机机巢的正面、后面、左面、右面均设有无线电能传输发射端线圈。
7、可选地,所述无线充电平台通过高频逆变电路获取所述蓄能模块的电能。
8、本发明第二方面实施例提供一种无人机巡线自主续航方法,包括以下步骤:预先将ct取能模块和蓄能模块设置在目标杆塔的输电线路上,预先将无线充电平台设置在所述目标杆塔的架空线路上;通过所述ct取能模块获取所述输电线路上的电能;利用所述蓄能模块将所述电能进行储存,并通过高频逆变电路将所述电能传导至所述无线充电平台;在目标无人机返回所述无线充电平台时,所述无线充电平台通过无线发射线圈为所述目标无人机进行续电。
9、本发明第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的无人机巡线自主续航方法。
10、本发明第四方面实施例提供一种计算机程序产品,该计算机程序/指令被处理器执行时实现如上的无人机巡线自主续航方法。
11、本发明第五方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,该程序被处理器执行时实现如上的无人机巡线自主续航方法。
12、本发明实施例提出的无人机巡线自主续航装置及方法,通过在一条架空线路上固定安装数台智能机巢,直接从输电线缆上自取电供给安装在架空线路上的智能机巢,通过无线电能传输方式供给无人机续电,无人机无需再续航过程中往返充电,也无需采用在恶劣天气条件下存在漏电隐患的车载智能机巢,大大减小了原本建机巢的取电成本,实现无人机巡航最大化覆盖范围、最小化成本和最大化效率;还可以设置一条设有数个续航装置的巡线路线,无人机每完成一段自主巡线后可到杆塔上进行自主充电进而完成整条线路的自主巡航;对杆塔取电套装设计防盗装置,增加不法人员偷盗难度;让塔装方案从单个到整体,大大拓新了塔装方案后续应用前景,在电网无人机巡线方面将有广阔应用。
13、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种无人机巡线自主续航装置,其特征在于,包括:
2.根据权利要求1所述的无人机巡线自主续航装置,其特征在于,所述ct取能模块包括开气隙磁芯和匹配电容,其中,所述开气隙磁芯套接在所述输电线路上,所述开气隙磁芯的线圈两侧连接所述匹配电容。
3.根据权利要求1所述的无人机巡线自主续航装置,其特征在于,所述蓄能模块包括整流电路、dc-dc电路、取能负载和充放电管理电路,其中,所述整流电路通过变压器与所述ct取能模块连接,所述dc-dc电路与所述整流电路连接,所述取能负载与所述dc-dc电路连接,所述充放电管理电路与所述取能负载连接。
4.根据权利要求3所述的无人机巡线自主续航装置,其特征在于,所述蓄能模块控制所述取能负载的输入阻抗与所述ct取能模块的阻抗相匹配,以从所述输电线路获取所述电能。
5.根据权利要求1所述的无人机巡线自主续航装置,其特征在于,所述无线充电平台为呈正方体的无人机机巢,在所述无人机机巢的正面、后面、左面、右面均设有无线电能传输发射端线圈。
6.根据权利要求5所述的无人机巡线自主续航装置,其特征在于,所述无线充电平台通过高频逆变电路获取所述蓄能模块的电能。
7.一种无人机巡线自主续航方法,其特征在于,采用权利要求1-6任一项所述的无人机巡线自主续航装置,包括以下步骤:
8.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如权利要求7所述的无人机巡线自主续航方法。
9.一种计算机程序产品,其特征在于,该计算机程序/指令被处理器执行时实现权利要求7所述的无人机巡线自主续航方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行,以用于实现如权利要求7所述的无人机巡线自主续航方法。
技术总结
本发明涉及飞行器续航技术领域,特别涉及一种无人机巡线自主续航装置及方法,其中,装置包括:CT取能模块,CT取能模块设置在目标杆塔的输电线路上,并与输电线路连接,以获取输电线路上的电能;蓄能模块,蓄能模块与CT取能模块连接,以储存电能;无线充电平台,无线充电平台设置在目标杆塔的架空线路上,以通过无线电能传输接收电能,并将电能传导至目标无人机。由此,解决了现有无人机续航方式需要另准备充电设施给无人机机巢充电,操作繁琐且耗时耗力等问题。
技术研发人员:谢宇奇,张国庆,徐英,张雨欣,仪忠凯
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/8/27
- 还没有人留言评论。精彩留言会获得点赞!