一种四旋翼无人机的制作方法
本申请涉及无人机的,尤其是涉及一种四旋翼无人机。
背景技术:
1、目前无人机已经大量应用于商业领域,特别是四旋翼无人机凭借其结构简单、便于操作、价格实惠等特点,成为了众多无人机中的主流。
2、在四旋翼无人机降落过程中,可能由于操作不当或者无人机故障等原因,四旋翼无人机会以较快的速度掉落在地面上,从而容易造成四旋翼无人机内部结构的冲击损害。
3、为了防止四旋翼无人机以较快速度掉落在地面上造成的潜在损害,所以就需要设计一种可缓冲降落冲击力的四旋翼无人机。
技术实现思路
1、为了解决上述问题,本申请提供一种四旋翼无人机。
2、本申请提供的一种四旋翼无人机,采用如下的技术方案:
3、一种四旋翼无人机,包括无人机本体,还包括:
4、支架,水平设置有两个,且两个支架对称安装在无人机本体两侧,支架内部开设有缓冲槽;
5、缓冲组件,设置有两个,且与支架一一对应,缓冲组件包括立柱、滑块以及缓冲弹簧,其中,立柱沿支架的长度方向设置有两个,立柱竖直设置,且沿竖直方向滑动插设在支架底部,立柱顶部位于缓冲槽内;滑块设置有两个且沿支架的长度方向滑动设置在缓冲槽内,两个滑块均位于两个立柱之间;缓冲弹簧与支架平行设置,且位于缓冲槽内,缓冲弹簧固定设置在两个滑块之间,缓冲弹簧始终处于压缩状态;
6、连接组件,设置有若干个,且与滑块一一对应,连接组件设置在滑块与靠近滑块的立柱之间,且用于调节滑块与对应立柱之间的固定距离;
7、检测组件,设置在立柱上,且用于检测立柱与地面之间的挤压信息;
8、调节组件,设置在缓冲槽内,且基于立柱与地面之间的挤压信息调节连接组件的工作状态。
9、通过采用上述技术方案,当无人机降落时,检测组件对立柱与地面之间的挤压情况进行检测,立柱与地面之间的挤压力越大,滑块与对应立柱之间的距离越小;
10、当滑块与对应立柱之间的距离减小时,两个滑块之间的距离增大,此时,缓冲弹簧的长度较大,长度较大的缓冲弹簧能够发生更大的形变,且两个滑块之间的距离变大,使得立柱竖直向上的滑动距离、两个滑块在水平方向上相互靠近的滑动距离均变大,使得缓冲弹簧能够缓冲更多的冲击力,进而便于无人机安全稳定的降落。
11、可选的,所述连接组件包括:
12、第一连杆,一端与滑块铰接;
13、连接管,第一连杆远离滑块的一端同轴设置在连接管内,且与连接管螺纹连接,连接管远离第一连杆的一端为封闭结构;
14、第二连杆,与连接管同轴设置,第二连杆一端与立柱顶端铰接,另一端与连接管转动连接。
15、可选的,所述调节组件设置有若干个,且与连接组件一一对应,调节组件包括:
16、齿条,沿竖直方向滑动设置在缓冲槽内;
17、齿轮,位于缓冲槽内,且与齿条相啮合;
18、支撑轴,同轴穿设在齿轮上,且与齿轮固定连接,支撑轴绕自身轴线与缓冲槽内壁转动连接;
19、第一磁力轮,同轴套设在支撑轴上,且与支撑轴固定连接;
20、第二磁力轮,同轴套设在连接管上,且与连接管固定连接,第二磁力轮与第一磁力轮配合使用。
21、可选的,所述缓冲槽底壁上开设有安装槽,缓冲槽内设置有若干个传动组件,传动组件与调节组件一一对应,传动组件包括:
22、磁铁,固定设置在安装槽内,且位于齿条正下方,磁铁与齿条底端之间存在相互排斥力;
23、挡板,用于盖设在安装槽的槽口处;
24、传动伸缩杆,水平设置在缓冲槽内,传动伸缩杆的固定杆体与缓冲槽内壁固定连接,传动伸缩杆的活动杆体与挡板固定连接,当传动伸缩杆处于最大长度时,挡板盖设在安装槽的槽口处;
25、传动弹簧,沿传动伸缩杆的长度方向设置在传动伸缩杆的无杆腔内,传动弹簧始终处于压缩状态。
26、可选的,所述检测组件设置有若干个,且与传动组件、立柱均一一对应,检测组件包括:
27、检测盒,设置在对应的立柱正下方,且与立柱固定连接,检测盒为柔性材料制成;
28、检测管,一端与检测盒连通、另一端与对应的传动伸缩杆的有杆腔连通,检测管、检测盒、传动伸缩杆的有杆腔内均预设有流体。
29、综上所述,本申请包括以下至少一种有益技术效果:
30、1.通过设置缓冲组件、连接组件、调节组件、检测组件以及传动组件,检测组件对立柱与地面之间的挤压情况进行检测,调节组件用于调节滑块与对应立柱之间的距离;立柱与地面之间的挤压力越大,滑块与对应立柱之间的距离越小;当滑块与对应立柱之间的距离减小时,两个滑块之间的距离、缓冲弹簧的长度均增大,长度较大的缓冲弹簧能够发生更大的形变,使得缓冲弹簧能够缓冲更多的冲击力,进而便于无人机安全稳定的降落。
技术特征:
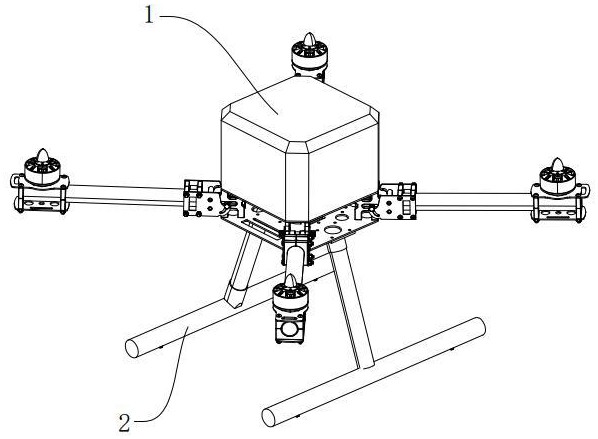
1.一种四旋翼无人机,包括无人机本体(1),其特征在于,还包括:
2.根据权利要求1所述的一种四旋翼无人机,其特征在于,所述连接组件(4)包括:
3.根据权利要求2所述的一种四旋翼无人机,其特征在于,所述调节组件(5)设置有若干个,且与连接组件(4)一一对应,调节组件(5)包括:
4.根据权利要求3所述的一种四旋翼无人机,其特征在于,所述缓冲槽(21)底壁上开设有安装槽(22),缓冲槽(21)内设置有若干个传动组件(7),传动组件(7)与调节组件(5)一一对应,传动组件(7)包括:
5.根据权利要求4所述的一种四旋翼无人机,其特征在于,所述检测组件(6)设置有若干个,且与传动组件(7)、立柱(31)均一一对应,检测组件(6)包括:
技术总结
本申请涉及一种四旋翼无人机,涉及无人机的技术领域,其包括无人机本体,还包括:支架,水平设置有两个,且两个支架对称安装在无人机两侧,支架内部开设有缓冲槽;缓冲组件,缓冲组件包括立柱、滑块以及缓冲弹簧,立柱沿支架的长度方向设置有两个,立柱竖直设置,且沿竖直方向滑动插设在支架底部,立柱顶部位于缓冲槽内;滑块设置有两个且沿支架的长度方向滑动设置在缓冲槽内,两个滑块均位于两个立柱之间;缓冲弹簧与支架平行设置,缓冲弹簧固定设置在两个滑块之间;连接组件,设置有若干个,且与滑块一一对应;检测组件,用于检测立柱与地面之间的挤压信息;调节组件,基于立柱与地面之间的挤压信息调节连接组件的工作状态。
技术研发人员:段建文,帖琴修,邢小鹏,杜俊杰
受保护的技术使用者:山西万鼎空间数字股份有限公司
技术研发日:
技术公布日:2024/7/11
- 还没有人留言评论。精彩留言会获得点赞!