无人机氢燃料电池系统的控制方法、设备及介质与流程
本发明涉及无人机,尤其是涉及一种无人机氢燃料电池系统的控制方法、设备及介质。
背景技术:
1、随着无人机技术的不断发展,无人机的应用范围越来越广,比如应用在军事行动、地质勘测、物流运输、农业应用、影视拍摄、消防抗灾以及救援巡查等诸多领域。
2、然而,无人机在各个领域中常常因为执行艰难的任务需要较长的工作的时间,无人机在执行任务时,难免出现续航不足的情况,例如,测绘时,由于续航不足必须返回基地补充能源,如此一来,使得任务中断,切断了无人机执行任务的连续性,增加了无人机完成任务的时间。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种无人机氢燃料电池系统的控制方法、设备及介质,本发明通过控制启动电池与氢燃料电池模块同时供电给电机,达到在续航时间内均衡消耗电量,实现单次飞行的最大续航时间。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明第一方面提供了一种无人机氢燃料电池系统的控制方法,包括以下步骤:
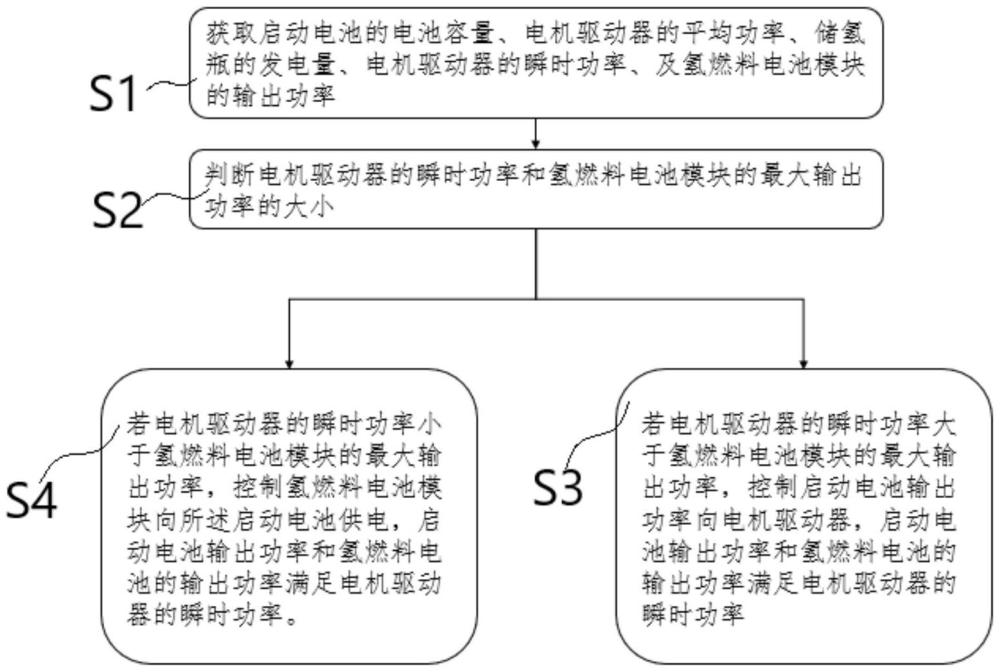
4、s1,获取启动电池的电池容量、电机驱动器的平均功率、储氢瓶的发电量、电机驱动器的瞬时功率、及氢燃料电池模块的输出功率;
5、s2,判断电机驱动器的瞬时功率和氢燃料电池模块的最大输出功率的大小;
6、s3,若电机驱动器的瞬时功率大于氢燃料电池模块的最大输出功率,控制启动电池输出功率向电机驱动器,启动电池输出功率和氢燃料电池模块的输出功率满足电机驱动器的瞬时功率;
7、s4,若电机驱动器的瞬时功率小于氢燃料电池模块的最大输出功率,控制氢燃料电池模块向所述启动电池供电,启动电池输出功率和氢燃料电池模块的输出功率满足电机驱动器的瞬时功率。
8、进一步的,步骤s1中,氢动力控制器获取启动电池的输出/输入电压与电流的实时数据以计算其功率及电池容量。
9、进一步的,步骤s1中,获取电机驱动器的平均功率通过氢动力控制器实时采集电机驱动器的瞬时功率计算得到,电机驱动器的瞬时功率通过氢动力控制器实时采集获得。
10、进一步的,步骤s1中,获取氢燃料电池模块的输出功率具体为:
11、氢动力控制器获取氢燃料电池模块的输出电压与电流实时数据计算得到其功率。
12、进一步的,步骤s3中,氢燃料电池模块与启动电池共同给电机驱动器供电,启动电池输出功率和氢燃料电池模块的输出功率满足电机驱动器的瞬时功率。
13、进一步的,步骤s4中,氢燃料电池模块同时向电机驱动器输出功率。
14、进一步的,步骤s4中,氢燃料电池模块向电机驱动器的输出功率满足:
15、
16、式中,pav为电机驱动器的平均功率,whr为储氢瓶的剩余氢发电量;wbr为启动电池的剩余电量,phrt为氢燃料电池模块向电机驱动器的输出功率;
17、whr=k×hr
18、式中,k为氢燃料电池模块氢发电率系数;
19、hr=p×v
20、式中,p为剩余氢瓶气压力,v为氢瓶水容积。
21、需要说明的是,式中(whr+wbr)/pav为剩余氢发电量与剩余电池电量除以电机平均功率得到剩余发电时间tr。phrt=whr/tr即为剩余氢应分摊输出的功率。pbrt=wbr/tr为剩余电池量应分摊输出的功率。
22、进一步的,步骤s4中,氢燃料电池模块的最大输出功率满足氢燃料电池模块向电机驱动器的输出功率和氢燃料电池模块向启动电池的输出功率之和。
23、本发明第二方面提供了一种电子设备,包括:
24、一个或多个处理器;
25、存储器;以及
26、被存储在存储器中的一个或多个程序,所述一个或多个程序包括用于执行如上述的一种无人机氢燃料电池系统的控制方法的指令。
27、本发明第三方面提供了一种计算机可读存储介质,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行如上述的一种无人机氢燃料电池系统的控制方法的指令。
28、与现有技术相比,本发明具有以下有益效果:
29、1、本发明优化电气结构,氢燃料电池与电机适配性好,通过dc/dc变换控制与充电管理,可更好的匹配氢燃料电池与电机,可优化氢燃料电池与电机的设计。
30、2、本发明优化启动电池充电管理及优化控制算法,从而实现启动电池与氢燃料电池模块一直同时供电给电机,达到在续航时间内均衡消耗电量,实现单次飞行的最大续航时间。
技术特征:
1.一种无人机氢燃料电池系统的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种无人机氢燃料电池系统的控制方法,其特征在于,步骤s1中,氢动力控制器获取启动电池的输出/输入电压与电流的实时数据以计算其功率及电池容量。
3.根据权利要求1所述的一种无人机氢燃料电池系统的控制方法,其特征在于,步骤s1中,获取电机驱动器的平均功率通过氢动力控制器实时采集电机驱动器的瞬时功率计算得到,电机驱动器的瞬时功率通过氢动力控制器实时采集获得。
4.根据权利要求1所述的一种无人机氢燃料电池系统的控制方法,其特征在于,步骤s1中,获取氢燃料电池模块的输出功率具体为:
5.根据权利要求1所述的一种无人机氢燃料电池系统的控制方法,其特征在于,步骤s3中,氢燃料电池模块与启动电池共同给电机驱动器供电,启动电池输出功率和氢燃料电池模块的输出功率满足电机驱动器的瞬时功率。
6.根据权利要求1所述的一种无人机氢燃料电池系统的控制方法,其特征在于,步骤s4中,氢燃料电池模块同时向电机驱动器输出功率。
7.根据权利要求1所述的一种无人机氢燃料电池系统的控制方法,其特征在于,步骤s4中,氢燃料电池模块向电机驱动器的输出功率满足:
8.根据权利要求1所述的一种无人机氢燃料电池系统的控制方法,其特征在于,步骤s4中,氢燃料电池模块的最大输出功率满足氢燃料电池模块向电机驱动器的输出功率和氢燃料电池模块向启动电池的输出功率之和。
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行如权利要求1-8任一所述的一种无人机氢燃料电池系统的控制方法的指令。
技术总结
本发明涉及一种无人机氢燃料电池系统的控制方法、设备及介质,该方法包括S1,获取启动电池的电池容量、电机驱动器的平均功率、储氢瓶的发电量、电机驱动器的瞬时功率、及氢燃料电池模块的输出功率;S2,判断电机驱动器的瞬时功率和氢燃料电池模块的最大输出功率的大小;S3,若电机驱动器的瞬时功率大于氢燃料电池模块的最大输出功率,控制启动电池输出功率向电机驱动器;S4,若电机驱动器的瞬时功率小于氢燃料电池模块的最大输出功率,控制氢燃料电池模块向所述启动电池供电。与现有技术相比,本发明通过控制启动电池与氢燃料电池模块同时供电给电机,达到在续航时间内均衡消耗电量,实现单次飞行的最大续航时间。
技术研发人员:陈焕光
受保护的技术使用者:氢合(上海)科技发展有限公司
技术研发日:
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!