一种地形测量用无人机的制作方法
本发明涉及无人机,具体是涉及一种地形测量用无人机。
背景技术:
1、地形测量是指对地球表面地形的形状、尺寸进行测量,再通过一定的比例缩小并绘制成地形图,从而便于人们对地形的了解与探测,为了便于地形测绘,目前常使用带有摄像功能的无人机进行地形图的采集。在地形图采集过程中,一般会使得无人机上摄像头朝向飞行方向,无人机沿着预设飞行路径进行图像采集即可,采集过程中不进行摄像头的角度调节,如此,采集的图像区域十分有限,需要无人机飞行的路径较长,采集效率较低。因此,需要提供一种地形测量用无人机,旨在解决上述问题。
技术实现思路
1、本发明的目的在于提供一种地形测量用无人机,旨在解决背景技术中提到的问题。
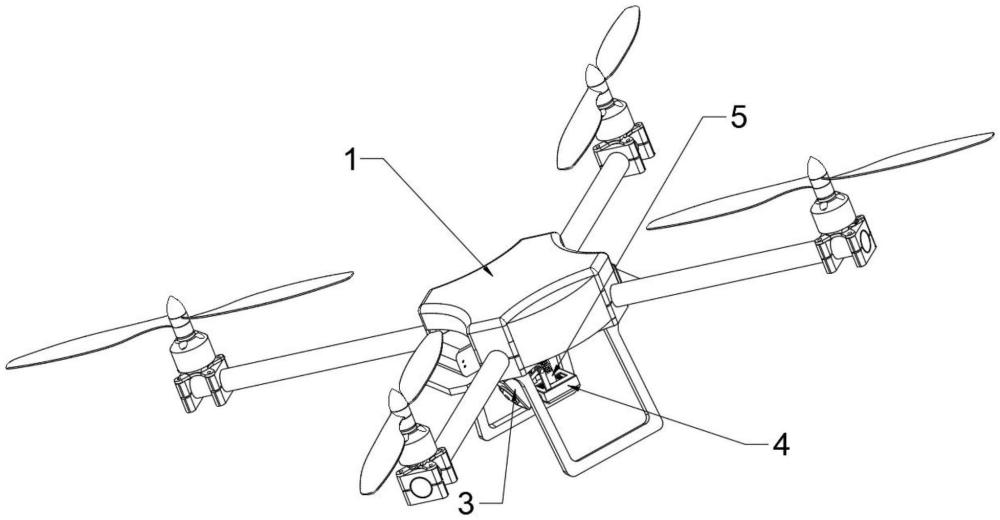
2、为实现上述目的,本发明提供如下技术方案,一种地形测量用无人机,包括无人机主体和摄像头,所述地形测量用无人机还包括朝向调节机构和倾角调节机构,朝向调节机构用于对摄像头的朝向进行调节、以使得摄像头能够采集飞行方向的两侧以及前方的地形图像,倾角调节机构包括蜗杆和蜗轮,蜗轮与转动轴固定连接,转动轴通过连接杆与摄像头固定连接,旋转移动座上设置有固定架,转动轴与所述固定架转动连接;所述朝向调节机构包括驱动电机和旋转移动座,驱动电机固定安装在无人机主体上,驱动电机的输出轴与蜗杆同轴固定连接,旋转移动座中设置有导向槽,导向槽中滑动配合连接有电磁铁,电磁铁套设在蜗杆的外侧,所述蜗杆由铁磁性物质制成,导向槽中远离摄像头的内侧面上安装有铁磁性块,电磁铁与导向槽的两个侧面通过第一复位弹簧相连接;当电磁铁未通电时,电磁铁与蜗杆转动连接,电磁铁位于导向槽的中间处,蜗杆和蜗轮配合连接;当电磁铁通电时,电磁铁与蜗杆固定连接,铁磁性块带着旋转移动座向蜗杆靠近,蜗杆和蜗轮分离。
3、作为本发明的进一步方案,所述电磁铁的表面设置有阶梯孔,所述阶梯孔由上位孔和下位孔组成,上位孔的直径值小于下位孔的直径值,所述上位孔的内侧面与蜗杆的外侧面接触,蜗杆的下端固定连接有限位板,限位板位于所述下位孔中;所述导向槽的上端边缘处设置有内翻边。
4、作为本发明的进一步方案,所述限位板的表面活动安装有若干个滚珠,若干个滚珠与所述下位孔的顶面滚动连接,所述转动轴与固定架之间设置有转动阻尼。
5、作为本发明的进一步方案,所述摄像头上固定连接有导向弧形板,所述旋转移动座上固定连接有导向限位套,导向弧形板的外侧面与导向限位套的内壁滑动配合连接,所述导向弧形板的中心线与导向限位套的中心线共线设置,导向限位套的中心线与蜗轮的中心线共线设置。
6、作为本发明的进一步方案,所述导向弧形板的弧形面上设置有若干个圆弧凹槽,所述导向限位套的弧形内壁上安装有若干个限位组件,限位组件与所述圆弧凹槽相配合。
7、作为本发明的进一步方案,所述限位组件包括半球伸缩头和第二复位弹簧,所述导向限位套的弧形内壁上设置有若干个盲孔,所述半球伸缩头与盲孔的端面通过第二复位弹簧相连接,半球伸缩头与圆弧凹槽相适配。
8、作为本发明的进一步方案,所述地形测量用无人机还包括图像拼接模块,图像拼接模块用于对摄像头采集的地形图像进行拼接,拼接步骤包括图像预处理、确定图像拼接位置以及图像间融合重构。
9、本发明还提供一种地形测量用无人机的控制方法,应用于所述的地形测量用无人机,所述控制方法包括以下步骤:
10、步骤一:接收用户输入的基础设置数据,所述基础设置数据包括飞行路径、飞行高度、飞行速度、拍摄间距以及摄像头倾角;
11、步骤二:通过倾角调节机构对摄像头的倾角进行调节,使得无人机达到飞行路径的起始点悬停;
12、步骤三:采集一个侧面的地形图像;通过朝向调节机构使得摄像头朝向前方,采集前方的地形图像;通过朝向调节机构使得摄像头朝向另一个侧面,采集另一个侧面的地形图像;
13、步骤四:根据飞行路径和拍摄间距确定无人机下一个拍摄点,在下一个拍摄点进行悬停,重复步骤二和步骤三,直到无人机达到飞行路径的终点。
14、综上所述,本发明的有益效果是:
15、通过旋转移动座、蜗杆、蜗轮、电磁铁、导向槽、第一复位弹簧以及铁磁性块的设置,可以对摄像头的俯仰倾角进行调节,且在飞行过程中,会对摄像头的朝向进行调节,进而使得摄像头在每一个拍摄点同时得到无人机前方的地形图像以及两个侧面的地形图像;相比现有技术,在同一个飞行路径下,本发明采集的地形图像区域大幅增加,采集效率提高。
技术特征:
1.一种地形测量用无人机,包括无人机主体(1)和摄像头(3),其特征在于,所述地形测量用无人机还包括朝向调节机构和倾角调节机构,朝向调节机构用于对摄像头(3)的朝向进行调节、以使得摄像头(3)能够采集飞行方向的两侧以及前方的地形图像,倾角调节机构包括蜗杆(5)和蜗轮(6),蜗轮(6)与转动轴(7)固定连接,转动轴(7)通过连接杆(8)与摄像头(3)固定连接,旋转移动座(4)上设置有固定架(9),转动轴(7)与所述固定架(9)转动连接;所述朝向调节机构包括驱动电机(2)和旋转移动座(4),驱动电机(2)固定安装在无人机主体(1)上,驱动电机(2)的输出轴与蜗杆(5)同轴固定连接,旋转移动座(4)中设置有导向槽(13),导向槽(13)中滑动配合连接有电磁铁(12),电磁铁(12)套设在蜗杆(5)的外侧,所述蜗杆(5)由铁磁性物质制成,导向槽(13)中远离摄像头(3)的内侧面上安装有铁磁性块(16),电磁铁(12)与导向槽(13)的两个侧面通过第一复位弹簧(14)相连接;当电磁铁(12)未通电时,电磁铁(12)与蜗杆(5)转动连接,电磁铁(12)位于导向槽(13)的中间处,蜗杆(5)和蜗轮(6)配合连接;当电磁铁(12)通电时,电磁铁(12)与蜗杆(5)固定连接,铁磁性块(16)带着旋转移动座(4)向蜗杆(5)靠近,蜗杆(5)和蜗轮(6)分离。
2.根据权利要求1所述的地形测量用无人机,其特征在于,所述电磁铁(12)的表面设置有阶梯孔,所述阶梯孔由上位孔和下位孔组成,上位孔的直径值小于下位孔的直径值,所述上位孔的内侧面与蜗杆(5)的外侧面接触,蜗杆(5)的下端固定连接有限位板(15),限位板(15)位于所述下位孔中;所述导向槽(13)的上端边缘处设置有内翻边。
3.根据权利要求2所述的地形测量用无人机,其特征在于,所述限位板(15)的表面活动安装有若干个滚珠(19),若干个滚珠(19)与所述下位孔的顶面滚动连接,所述转动轴(7)与固定架(9)之间设置有转动阻尼。
4.根据权利要求1所述的地形测量用无人机,其特征在于,所述摄像头(3)上固定连接有导向弧形板(10),所述旋转移动座(4)上固定连接有导向限位套(11),导向弧形板(10)的外侧面与导向限位套(11)的内壁滑动配合连接,所述导向弧形板(10)的中心线与导向限位套(11)的中心线共线设置,导向限位套(11)的中心线与蜗轮(6)的中心线共线设置。
5.根据权利要求4所述的地形测量用无人机,其特征在于,所述导向弧形板(10)的弧形面上设置有若干个圆弧凹槽(17),所述导向限位套(11)的弧形内壁上安装有若干个限位组件(18),限位组件(18)与所述圆弧凹槽(17)相配合。
6.根据权利要求5所述的地形测量用无人机,其特征在于,所述限位组件(18)包括半球伸缩头(181)和第二复位弹簧(183),所述导向限位套(11)的弧形内壁上设置有若干个盲孔(182),所述半球伸缩头(181)与盲孔(182)的端面通过第二复位弹簧(183)相连接,半球伸缩头(181)与圆弧凹槽(17)相适配。
7.根据权利要求1所述的地形测量用无人机,其特征在于,所述地形测量用无人机还包括图像拼接模块,图像拼接模块用于对摄像头(3)采集的地形图像进行拼接,拼接步骤包括图像预处理、确定图像拼接位置以及图像间融合重构。
8.一种地形测量用无人机的控制方法,应用于权利要求1所述的地形测量用无人机,其特征在于,所述控制方法包括以下步骤:
技术总结
本发明涉及无人机技术领域,提供了一种地形测量用无人机,包括无人机主体和摄像头,还包括朝向调节机构和倾角调节机构,倾角调节机构包括蜗杆和蜗轮,转动轴通过连接杆与摄像头固定连接,旋转移动座上设置有固定架,转动轴与所述固定架转动连接;朝向调节机构包括驱动电机和旋转移动座,驱动电机的输出轴与蜗杆连接,旋转移动座中设置有导向槽,导向槽中滑动配合连接有电磁铁,电磁铁套设在蜗杆的外侧,导向槽中远离摄像头的内侧面上安装有铁磁性块,电磁铁与导向槽的侧面通过第一复位弹簧相连接。使用本发明,会使得摄像头在每一个拍摄点同时得到无人机前方的地形图像以及两个侧面的地形图像,采集的地形图像区域大幅增加,采集效率提高。
技术研发人员:李东云
受保护的技术使用者:大连东子木机械设备有限公司
技术研发日:
技术公布日:2024/8/27
- 还没有人留言评论。精彩留言会获得点赞!