滑动系留式隧道巡检无人机系统的制作方法
本发明涉及隧道巡检,具体涉及一种用于滑动系留式隧道巡检无人机系统。
背景技术:
1、与开放路段相比,隧道具有结构封闭,视线差、空间小等特点,是交通事故高发风险区。目前公路隧道监测手段主要依赖于隧道内布设的摄像头,然而摄像头为固定式安装、检测范围及形式有限,难以在区域内全覆盖。无人机具有飞行速度快、机动性强、灵活性高等特点,可携带诸如红外、可见光相机、烟雾、温、湿度等各类传感器进入隧道代替人工及固定式摄像头完成隧道内土建结构、机电设施及交通状况以及异常事件的巡检任务。但是在隧道场景下,传统无人机的续航时间较短,需要频繁更换电池或充电,且在飞行时容易掉落或侵入与车辆及隧道设施干涉的潜在危险空域,对行车安全造成巨大隐患。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种滑动系留式隧道巡检无人机系统,解决隧道日常巡检场景下,无人机续航时间短,需频繁拆卸电池充电,且容易侵入与车辆及隧道设施干涉的危险飞行区域问题。
2、本发明提供的用于滑动系留式隧道巡检无人机系统采用以下技术方案:
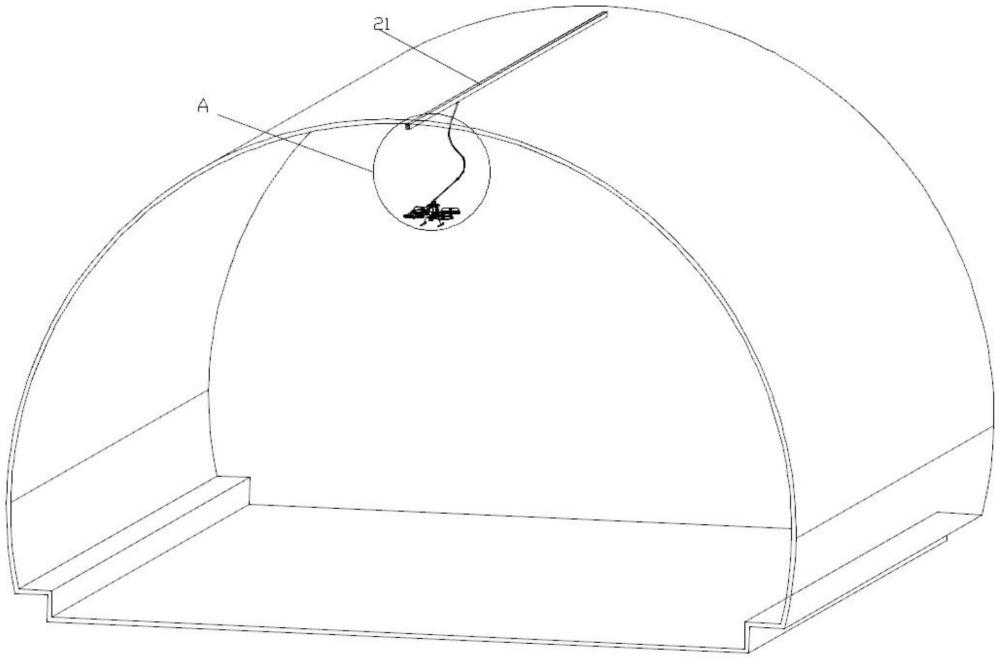
3、一种滑动系留式隧道巡检无人机系统,包括无人机本体和设置于隧道顶部的供电装置,所述供电装置包括设置于隧道顶部的供电导轨、滑动设置于供电导轨内的集电器和设置于集电器上的供电线,所述供电线与集电器多自由度连接,所述供电线与无人机本体多自由度连接,所述供电线与无人机本体连接,所述集电器在供电导轨内滑动时产生电能通过供电线向无人机本体供电。
4、进一步,所述供电导轨的两侧分别设置有正极和负极的铜片,所述集电器的两侧设置有与铜片接触的碳刷。
5、进一步,所述集电器的周侧上设置有用于可在供电导轨内滚动的滚轮。
6、进一步,所述无人机本体顶部设置有用于接收电源的接收座,所述接收座转动设置于无人机本体顶部,所述接收座上转动设置有用于连接供电线的导电滑环。
7、进一步,所述无人机本体顶部设置有安装座,所述无人机本体上设置有若干用于固定安装座的安装槽,所述接收座转动设置于安装座上。
8、进一步,所述接收座上设置有用于连接供电线的接头,所述接头铰接在接收座上。
9、进一步,所述接头上连接有用于供电线穿过与接头连接的线束硬管,所述线束硬管的俯仰角度为0-180°。
10、进一步,所述无人机本体位于桨叶上方设置有保护罩,所述保护罩的半径为r,所述无人机本体的轴距为d,所述线束硬管的长度为l,其中l>(d+2r)/2。
11、进一步,所述无人机本体的前端设置有用于定位与导航的激光雷达和用于进行巡检的相机。
12、进一步,所述无人机本体的底部设置有用于实时测量机身与隧道底部距离的激光测距传感器。
13、综上所述,本发明包含以下至少一种有益效果:
14、1.无人机在飞行过程中集电器与供电导轨能够持续为无人机供电,解决无人机续航短的问题,保障无人机在隧道内部全天候巡检需求;
15、2.无人机在飞行过程中受供电线的牵引只能够沿供电导轨在特定区域飞行,防止无人机飞出安全区域以及掉落;
16、3.线束硬管俯仰角度0-180°,即使无人机的飞行高度增加,供电线垂下时,由于线束硬管极限倾斜角度为0-180°,硬管长度l>(d+2r),r为保护罩半径,d为无人机轴距,线束硬管及供电线无法与桨叶干涉,起到保护作用。
技术特征:
1.一种滑动系留式隧道巡检无人机系统,其特征在于:包括无人机本体(1)和设置于隧道顶部的供电装置(2),所述供电装置(2)包括设置于隧道顶部的供电导轨(21)、滑动设置于供电导轨(21)内的集电器(22)和设置于集电器(22)上的供电线(23),所述供电线(13)与集电器(22)多自由度连接,所述供电线(23)与无人机本体(1)多自由度连接,所述集电器(22)在供电导轨(21)内滑动时产生电能通过供电线(23)向无人机本体(1)供电。
2.根据权利要求1所述的滑动系留式隧道巡检无人机系统,其特征在于:所述供电导轨(21)的两侧分别设置有正极和负极的铜片(211),所述集电器(22)的两侧设置有与铜片(211)接触的碳刷(221)。
3.根据权利要求2所述的滑动系留式隧道巡检无人机系统,其特征在于:所述集电器(22)的周侧上设置有用于可在供电导轨(21)内滚动的滚轮(222)。
4.根据权利要求1所述的滑动系留式隧道巡检无人机系统,其特征在于:所述无人机本体(1)顶部设置有用于接收电源的接收座(11),所述接收座(11)转动设置于无人机本体(1)顶部,所述接收座(11)上转动设置有用于连接供电线(23)的导电滑环(111)。
5.根据权利要求4所述的滑动系留式隧道巡检无人机系统,其特征在于:所述无人机本体(1)顶部设置有安装座(12),所述无人机本体(1)上设置有若干用于固定安装座(12)的安装槽(13),所述接收座(11)转动设置于安装座(12)上。
6.根据权利要求5所述的滑动系留式隧道巡检无人机系统,其特征在于:所述接收座(11)上设置有用于连接供电线(23)的接头(14),所述接头(14)铰接在接收座(11)上。
7.根据权利要求6所述的滑动系留式隧道巡检无人机系统,其特征在于:所述接头(14)上连接有用于供电线(23)穿过与接头(14)连接的线束硬管(15),所述线束硬管(15)的俯仰角度为0-180°。
8.根据权利要求7所述的滑动系留式隧道巡检无人机系统,其特征在于:所述无人机本体(1)位于桨叶上方设置有保护罩(16),所述保护罩(16)的半径为r,所述无人机本体(1)的轴距为d,所述线束硬管(15)的长度为l,其中l>(d+2r)/2。
9.根据权利要求1所述的滑动系留式隧道巡检无人机系统,其特征在于:所述无人机本体(1)的前端设置有用于定位与导航的激光雷达(17)和用于进行隧道巡检的相机(18)。
10.根据权利要求1所述的滑动系留式隧道巡检无人机系统,其特征在于:所述无人机本体(1)的底部设置有用于实时测量机身与隧道底部距离的激光测距传感器(19)。
技术总结
本发明公开了一种滑动系留式隧道巡检无人机系统,涉及隧道智能巡检技术领域,包括无人机本体和设置于隧道顶部的供电装置,所述供电装置包括设置于隧道顶部的供电导轨、滑动设置于供电导轨内的集电器和设置于集电器上的供电线,所述供电线与集电器多自由度连接,所述供电线与无人机本体多自由度连接,所述供电线与无人机本体连接,所述集电器在供电导轨内滑动时产生电能通过供电线向无人机本体供电;无人机在飞行过程中集电器与供电导轨能够持续为无人机供电,解决无人机续航短的问题,无人机在飞行过程中受供电线的牵引只能够沿供电导轨在特定区域飞行,防止无人机飞出安全区域以及掉落。
技术研发人员:杨喆,李文锋,周云腾,李旭东,梁婳婳,须民健
受保护的技术使用者:招商局重庆交通科研设计院有限公司
技术研发日:
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!