一种适用于升浮一体飞行器变重心装置和俯仰控制方法
本发明涉及飞行器设计,尤其是涉及一种适用于升浮一体飞行器变重心装置和俯仰控制方法。
背景技术:
1、随着对临近空间空域价值认识的提高,结合了平流层飞艇和高空长航时无人机特点的升浮一体飞行器也逐渐进入飞行器设计工作者视野。升浮一体飞行器常用于长时间高空不间断飞行,因此其结构和载荷都需极致的控制重量,提高飞行器效率以具备更高的重量效率,完成爬升至超高空和跨昼夜不间断飞行。由于尺寸较大,升浮一体飞行器在地面准备起飞时容易受到扰动出现意外情况,此时对飞行器实施快速有效的俯仰控制将十分必要。在飞行器俯仰控制方法上,飞机对俯仰采用舵面偏转控制,而由于升浮一体飞行器飞行的速度低,环境空气密度小,舵面面积小,因此偏转舵面所能提供的力矩较小,控制能力弱;艇式飞行器对俯仰采用副气囊抽排空气控制,该控制调整复杂,调整耗时长,且容易超调。因此需要设计一种全新的俯仰控制方法和配套的控制装置,以更高效的控制升浮一体飞行器的俯仰姿态。
技术实现思路
1、本发明的目的是提供一种适用于升浮一体飞行器变重心装置和俯仰控制方法,不需要额外添加配重块调节重心,通过控制重心位置,控制飞行器的俯仰角度。
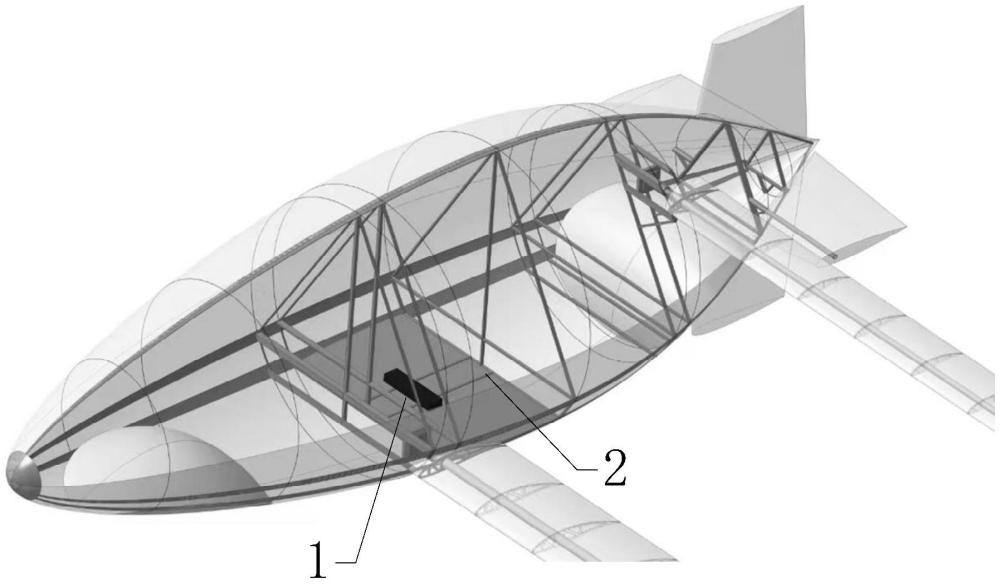
2、为实现上述目的,本发明提供了一种适用于升浮一体飞行器变重心装置和俯仰控制方法,包括储能电池配重、齿轮传动机构和导轨,所述导轨通过所述齿轮传动机构与所述储能电池配重连接,所述储能电池配重设置在所述齿轮传动机构的上方,所述齿轮传动机构上设置有锁定机构。
3、优选的,所述齿轮传动机构包括齿轮和电动马达,所述电动马达安装在所述储能电池配重上,所述电动马达与所述齿轮连接,所述齿轮与导轨连接,所述导轨上设置有齿条,所述齿条与所述齿轮啮合。
4、优选的,所述齿轮与所述锁定机构连接,所述锁定机构包括启动开关和锁定块,所述锁定块设置为倒u型结构,所述锁定块设置在所述齿轮的前后两部。
5、优选的,所述启动开关与飞行器的控制系统连接,所述控制系统包括传感器和飞行控制系统。
6、优选的,所述导轨采用铝合金轻质材料。
7、一种适用于升浮一体飞行器变重心装置的俯仰控制方法,包括以下步骤:
8、步骤一、进行俯仰操作时,控制系统将信号传递给齿轮传动机构;
9、步骤二、齿轮传动机构接收到信号后,启动电动马达带动齿轮和储能电池配重进行运动,飞行器进行俯仰操作;
10、步骤三、运动过程中,启动开关接收控制系统的信号,对齿轮传动机构进行锁定,飞行器完成俯仰操作。
11、因此,本发明采用上述结构的一种适用于升浮一体飞行器变重心装置和俯仰控制方法,具有以下有益效果:
12、(1)利用变重心方式控制俯仰力矩变化,平尾在具有变重心装置后,可不起操纵作用,采用充气囊体形式仅作为飞行器安定面,进一步减轻结构重量。
13、(2)变重心装置产生的俯仰力矩大,调节能力强,且变重心装置调节更快速更精确,更不容易出现超调现象。
14、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种适用于升浮一体飞行器变重心装置,其特征在于:包括储能电池配重、齿轮传动机构和导轨,所述导轨通过所述齿轮传动机构与所述储能电池配重连接,所述储能电池配重设置在所述齿轮传动机构的上方,所述齿轮传动机构上设置有锁定机构。
2.根据权利要求1所述的一种适用于升浮一体飞行器变重心装置,其特征在于:所述齿轮传动机构包括齿轮和电动马达,所述电动马达安装在所述储能电池配重上,所述电动马达与所述齿轮连接,所述齿轮与导轨连接,所述导轨上设置有齿条,所述齿条与所述齿轮啮合。
3.根据权利要求2所述的一种适用于升浮一体飞行器变重心装置和,其特征在于:所述齿轮与所述锁定机构连接,所述锁定机构包括启动开关和锁定块,所述锁定块设置为倒u型结构,所述锁定块设置在所述齿轮的前后两部。
4.根据权利要求3所述的一种适用于升浮一体飞行器变重心装置,其特征在于:所述启动开关与飞行器的控制系统连接,所述控制系统包括传感器和飞行控制系统。
5.根据权利要求4所述的一种适用于升浮一体飞行器变重心装置,其特征在于:所述导轨采用铝合金轻质材料。
6.应用上述权利要求1-5所述的一种适用于升浮一体飞行器变重心装置的俯仰控制方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种适用于升浮一体飞行器变重心装置和俯仰控制方法,涉及飞行器设计技术领域,包括储能电池配重、齿轮传动机构和导轨,所述导轨通过所述齿轮传动机构与所述储能电池配重连接,所述储能电池配重设置在所述齿轮传动机构的上方,所述齿轮传动机构上设置有锁定机构。本发明采用上述结构的一种适用于升浮一体飞行器变重心装置和俯仰控制方法,用变重心方式控制俯仰力矩变化,平尾在具有变重心装置后,可不起操纵作用,采用充气囊体形式仅作为飞行器安定面,进一步减轻结构重量;变重心装置产生的俯仰力矩大,调节能力强,且变重心装置调节更快速更精确,更不容易出现超调现象。
技术研发人员:杨穆清,孙福东,马东立,关皓,杨小鹏
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!