一种仿生蝴蝶飞行驱动装置及飞行装置
本发明涉及仿生飞行,尤其是涉及仿生蝴蝶飞行驱动装置及飞行装置。
背景技术:
1、在现代科技领域,仿生学作为一种创新技术,日益受到重视。它通过模仿自然界生物的结构和功能,为机械设计提供了新的思路和灵感。特别是在飞行装置的设计上,仿生技术的应用已经取得了显著的进展。然而,现有的仿生飞行装置往往存在结构复杂、控制困难、能效低等问题,限制了它们在实际应用中的广泛推广。例如,一些仿生昆虫飞行装置虽然能够模拟昆虫的飞行动作,但在稳定性和环境适应性方面仍有待提高。
2、蝴蝶作为自然界中飞行能力极强的昆虫之一,其翅膀的扑动方式和飞行控制机制一直是科学家们研究的重点。蝴蝶翅膀的扑动不仅能够产生升力,还能够在飞行中进行快速的转向和避障。然而,现有的仿生蝴蝶飞行装置大多采用单一的电机或舵机来驱动翅膀的扑动,这限制了翅膀扑动的灵活性和飞行的稳定性。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供仿生蝴蝶飞行驱动装置及飞行装置,通过电机驱动轮盘旋转,进而通过副杆和翅膀连接件实现翅膀的扑动,模拟蝴蝶的飞行动作,更接近蝴蝶的形态,能模拟蝴蝶的形态,提高了飞行灵活性和飞行的稳定性。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明第一方面提供一种仿生蝴蝶飞行驱动装置,包括骨架、一对电机装载体、轮盘、副杆、翅膀连接件,其中具体地:
4、一对电机装载体,对称式设于所述骨架的两侧,所述电机装载体的内部装设有伺服电机;
5、轮盘,其中部与所述伺服电机的输出轴连接;
6、副杆,其一端与所述轮盘轴接;
7、翅膀连接件,其一端设有翅膀接头,另一端与所述副杆的另一端轴接,所述翅膀连接件的中部轴接于所述骨架上,所述电机装载体被电机带动旋转时,轮盘被带动旋转,所述副杆围绕轮盘上的固定点进行旋转,使得翅膀连接件靠近翅膀接头的一端能够进行上下扑动的往复动作。
8、进一步地,所述骨架为左右对称结构。
9、进一步地,所述副杆的一端轴接于所述轮盘的边沿处。
10、进一步地,所述副杆的一端通过第一轴销轴接于所述轮盘的边沿处。
11、进一步地,所述副杆的另一端通过第二轴销轴接于所述翅膀连接件的一端。
12、进一步地,所述翅膀连接件的中部通过第三轴销轴接于所述骨架上。
13、进一步地,所述骨架的中心位置设有主杆,所述主杆垂直于所述骨架所在平面。
14、进一步地,所述主杆内部设有电池和控制板,所述电池和控制板分别与所述伺服电机电连接。
15、进一步地,所述主杆内部还设有无线信号收发器,所述无线信号收发器与外部用户终端无线通信连接。
16、进一步地,本发明装置的对称设计、精确的轴销连接以及内置的电池、控制板和无线通信功能,使得装置能够稳定、可控地飞行,具有高度的仿生特性
17、进一步地,本发明在无线通信时,采用了一个实时、高效的通信链路,该链路允许智能手机应用程序通过网络向蝴蝶模型发送控制指令。这些指令包括用于控制微型电机的参数,这些电机通过精密的齿轮和连杆机构与蝴蝶的翅膀相连,从而实现对翅膀运动的精确控制。
18、进一步地,在通信协议的设计中,udp被选为底层传输协议,因为它提供了低延迟的数据传输,这对于实时控制应用至关重要。尽管udp不保证数据的可靠交付,但我们的系统可以通过应用层的确认和重传机制来弥补这一缺陷,确保关键控制指令的到达。
19、本发明第二方面提供一种仿生蝴蝶飞行装置,包括如上述仿生蝴蝶飞行驱动装置,还包括设于所述翅膀接头上的仿生蝴蝶翅膀。
20、与现有技术相比,本发明具有以下技术优势:
21、1)本发明的双电机联动结构不仅提供了更大的扭矩,而且通过精确控制两个电机的转速和方向,能够更有效地利用能量,减少能量损耗。这种设计使得仿生蝴蝶飞行装置在不同环境条件下都能保持良好的飞行性能,无论是在微风还是无风的环境中,都能实现稳定飞行,提高了装置的环境适应性和能效。
22、2)可以采用更短的蝴蝶翅膀,能减轻整体重量,更加轻便,飞行时长更久,用更巧妙符合生物学的结构,更接近蝴蝶的形态,能模拟蝴蝶的形态。
23、3)采用双电机控制的翅膀扑动动作,可以独立调整每个翅膀的扑动频率和幅度,从而实现更精细的操控,比市面上的舵机方案转速更快,可以让蝴蝶翅膀震动频率增加,使飞行更加稳定。这种独立控制能力使得装置能够快速响应飞行中的微小调整,如快速转向或避障,提供了更高的操控灵活性和动态响应能力,更接近真实蝴蝶的飞行特性。
24、4)装置内部集成了电池、控制板以及无线信号收发器,这不仅减轻了重量,还为实现智能化控制提供了硬件基础。通过与外部用户终端的无线通信,装置可以接受实时指令,执行复杂的飞行任务,如编队飞行、路径规划等。此外,集成的控制板可以搭载先进的算法,实现对飞行状态的实时监控和自我调整,提高飞行的智能化水平。
技术特征:
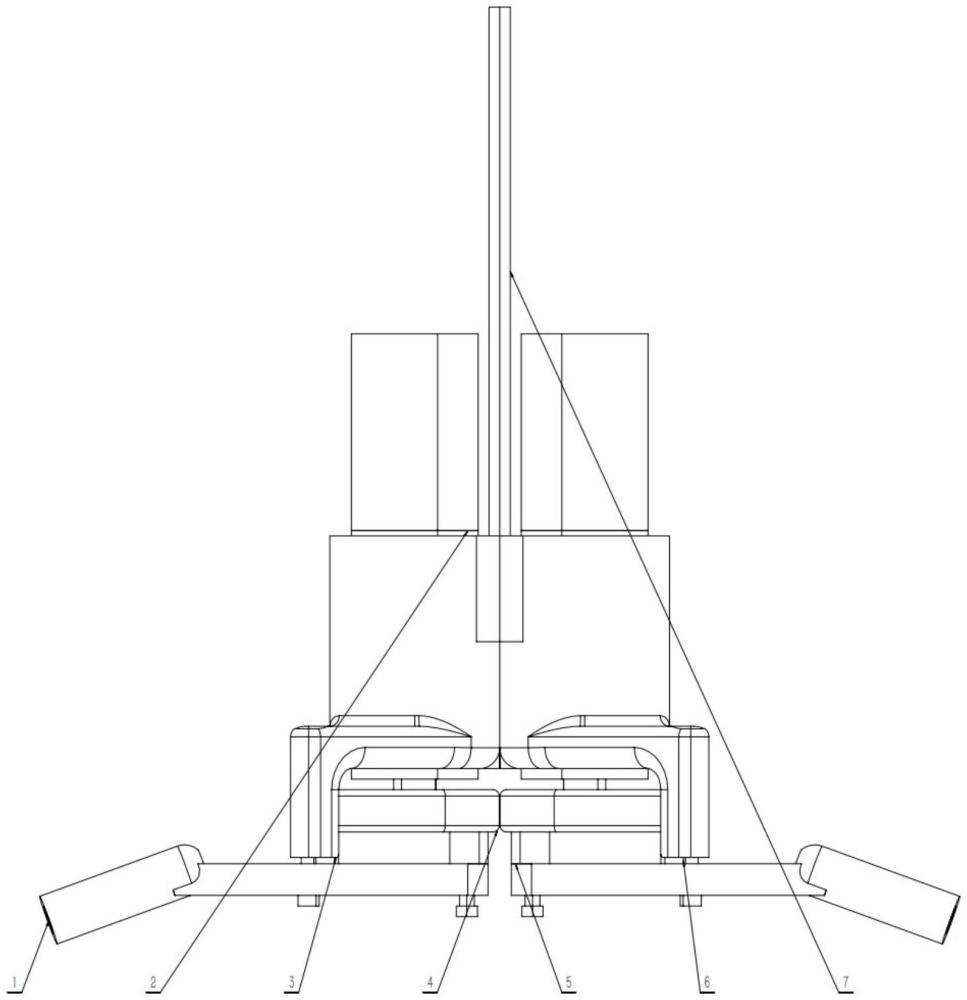
1.一种仿生蝴蝶飞行驱动装置,其特征在于,包括:
2.根据权利要求1所述的一种仿生蝴蝶飞行驱动装置,其特征在于,所述骨架(0)为左右对称结构。
3.根据权利要求1所述的一种仿生蝴蝶飞行驱动装置,其特征在于,所述副杆(5)的一端轴接于所述轮盘(4)的边沿处。
4.根据权利要求1所述的一种仿生蝴蝶飞行驱动装置,其特征在于,所述副杆(5)的一端通过第一轴销(3)轴接于所述轮盘(4)的边沿处。
5.根据权利要求4所述的一种仿生蝴蝶飞行驱动装置,其特征在于,所述副杆(5)的另一端通过第二轴销(8)轴接于所述翅膀连接件(1)的一端。
6.根据权利要求4所述的一种仿生蝴蝶飞行驱动装置,其特征在于,所述翅膀连接件(1)的中部通过第三轴销(6)轴接于所述骨架(0)上。
7.根据权利要求4所述的一种仿生蝴蝶飞行驱动装置,其特征在于,所述骨架(0)的中心位置设有主杆(7),所述主杆(7)垂直于所述骨架(0)所在平面。
8.根据权利要求7所述的一种仿生蝴蝶飞行驱动装置,其特征在于,所述主杆(7)内部设有电池和控制板,所述电池和控制板分别与所述伺服电机电连接。
9.根据权利要求8所述的一种仿生蝴蝶飞行驱动装置,其特征在于,所述主杆(7)内部还设有无线信号收发器,所述无线信号收发器与外部用户终端无线通信连接。
10.一种仿生蝴蝶飞行装置,其特征在于,包括如权利要求1至9中任意一项所述仿生蝴蝶飞行驱动装置,还包括设于所述翅膀接头(11)上的仿生蝴蝶翅膀。
技术总结
本发明涉及一种仿生蝴蝶飞行驱动装置及飞行装置,飞行驱动装置包括骨架、一对电机装载体、轮盘、副杆、翅膀连接件,其中一对电机装载体对称式设于所述骨架的两侧,所述电机装载体的内部装设有伺服电机;轮盘的中部与所述伺服电机的输出轴连接;副杆的一端与所述轮盘轴接;翅膀连接件的一端设有翅膀接头,另一端与所述副杆的另一端轴接,所述翅膀连接件的中部轴接于所述骨架上,所述电机装载体被电机带动旋转时,轮盘被带动旋转。与现有技术相比,本发明通过电机驱动轮盘旋转,进而通过副杆和翅膀连接件实现翅膀的扑动,模拟蝴蝶的飞行动作,更接近蝴蝶的形态,能模拟蝴蝶的形态,提高了飞行灵活性和飞行的稳定性。
技术研发人员:张迪,丁星博,沈逸菲,曾子健,余同升
受保护的技术使用者:上海建桥学院有限责任公司
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!