翅膀驱动机构及仿生蝴蝶机器人
本发明涉及仿生机器人,特别涉及一种翅膀驱动机构及仿生蝴蝶机器人。
背景技术:
1、在微型飞行器设计领域,尤其是仿生蝴蝶机器人,翅膀驱动机构扮演着至关重要的角色。然而,现有技术在实现仿生飞行方面存在一些明显的局限性:
2、1、运动模式的局限性:目前的翅膀驱动机构大多采用简单的机械结构,它们能够实现的基本运动仅为翅膀的上下扑动。这种设计限制了飞行器模拟自然界中鸟类或昆虫翅膀的复杂运动模式,尤其是难以实现翅膀的前后收展动作。这种运动模式的单一性,限制了飞行器的机动性和飞行效率,尤其是在需要在狭窄空间中灵活飞行的场合。
3、2、结构复杂性问题:为了使翅膀能够实现更复杂的运动,如前后收展,研究者们尝试引入额外的机械结构。但这种增加的机械结构往往导致整个驱动机构变得复杂,体积也随之增大。这不仅增加了控制的难度,也影响了飞行器的紧凑性和便携性,不利于微型飞行器追求的小尺寸设计。
4、因此,有必要开发一种新型的翅膀驱动机构,它既能实现翅膀的多种运动模式,又能保持机构的简洁性和飞行器的微型化。
技术实现思路
1、本发明的目的之一是提供一种既能有效控制翅膀扑动又能实现收展动作的紧凑驱动机构。
2、为了实现上述目的,本发明采用如下技术方案:翅膀驱动机构,包括以夹角设置且角度可调的两个摆动座,每个摆动座上均设置有一个第一伞状齿轮且第一伞状齿轮上设置有第一偏心轴,两个第一伞状齿轮以夹角设置并始终保持啮合状态,每个摆动座各自连接一翅膀臂且该翅膀臂通过第一连杆与同侧的第一偏心轴相连,以在第一伞状齿轮旋转时,所述第一偏心轴能够随其旋转并带动第一连杆发生摆动,使得与之相连的翅膀臂发生竖直偏转(也即沿竖直方向上下摆动),从而实现翅膀的上下扑动动作;
3、所述两个摆动座被配置为能够沿水平方向发生相对摆动,以带动翅膀臂发生水平偏转(也即沿水平方向前后摆动),从而实现翅膀的前后收展动作。
4、进一步地,上述翅膀驱动机构包括位于摆动座后方的两个前后间隔设置的固定板;
5、所述两个摆动座的内侧端与位置靠前的固定板相连,所述两个摆动座的外侧端通过连接杆与位置靠后的固定板相连,所述两个固定板被配置为能够发生相对位移,以带动连接杆和摆动座发生水平摆动,使得翅膀臂发生水平偏转,从而实现翅膀的前后收展动作。
6、进一步地,位置靠后的固定板中间穿设有一根主体杆,所述主体杆的前端固定在位置靠前的固定板上,所述主体杆的后端向后延伸并固定连接有固定架,位置靠后的固定板后端固定连接有平行于主体杆的条形齿条,所述固定架上设置有可旋转的第二驱动齿轮且该第二驱动齿轮与条形齿条相啮合,以使得条形齿条能够在第二驱动齿轮的旋转带动下与主体杆发生相对运动,进而使两个固定板发生相对位移。
7、进一步地,其中一个摆动座上设置有第一伞状驱动齿轮且第一伞状驱动齿轮与同一摆动座上的第一伞状齿轮相啮合以驱动其旋转。
8、本发明的另一目的在于提供一种仿生蝴蝶机器人,其包括机身、前翅、后翅,所述机身前部设置有用于驱动前翅运动的前翅驱动机构且该前翅驱动机构采用上面所述的翅膀驱动机构。其中,所述翅膀驱动机构中的翅膀为前翅,具体为,所述前翅的翅膀臂与摆动座相连并通过第一连杆与第一偏心轴相连。
9、进一步地,所述机身后部设置有用于驱动后翅运动的后翅驱动机构,所述后翅驱动机构包括后转向座与设在后转向座后端的后扑翅驱动机构,所述后扑翅驱动机构包括设在后转向座后侧的固定座,所述固定座的下端设置有相互啮合的两个旋转齿轮,每个旋转齿轮上均设置有第二偏心轴,所述固定座的顶端通过一个旋转轴共同连接两个后翅的后翅膀臂且后翅膀臂通过第二连杆与第二偏心轴相连,以在旋转齿轮旋转时,所述第二偏心轴能够随其旋转并带动第二连杆发生摆动,使得与之相连的后翅膀臂发生竖直偏转,从而实现后翅的上下扑动动作。
10、进一步地,所述两个后翅膀臂位于同一平面上并相对于旋转轴左右对称,所述两个后翅膀臂的旋转轴连接端共同连接一装在旋转轴上的圆柱形件,所述圆柱形件沿两个后翅膀臂所处平面对半切开并分别与两个后翅膀臂相连。
11、进一步地,所述后转向座前端连接有用于驱动其水平偏转的后转向驱动机构,所述后转向驱动机构包括设置在后转向座前端的转向柱和安装在转向柱上的转向伞状齿轮,所述后转向座的前侧设置有安装座且该安装座上设置有转向套筒,所述转向柱转动安装在转向套筒中,所述安装座上设置有后伞状驱动齿轮且该后伞状驱动齿轮与转向伞状齿轮啮合以驱动其旋转,从而带动后转向座水平偏转,所述后翅膀臂随之偏转,实现后翅的水平转向。
12、进一步地,所述转向伞状齿轮的周部包括有齿部和无齿部两部分,所述后转向座的左右两侧均设置有限位柱,所述安装座的后端设置有与限位柱配合作用以阻止后转向座过度旋转的挡杆且该挡杆位于两个限位柱之间,所述安装座与后转向座之间设置有用于在后伞状驱动齿轮旋转至转向伞状齿轮的无齿部时,促使后转向座自动复位的复位机构。
13、进一步地,所述复位机构包括设置在后转向座上的横杆和位于横杆左右两端的橡皮筋,所述橡皮筋的另一端连接至安装座上。
14、进一步地,所述机身上安装有摄像头。
15、本发明能够同时控制翅膀的上下扑动和前后收展动作,显著提升了微型飞行器的机动性。这种复合运动能力让飞行器能够模拟自然界中鸟类或昆虫的飞行动作,增强了其在多变环境中的飞行性能。在确保运动自由度的同时,本发明实现了驱动机构的紧凑化设计,有利于微型飞行器向更小型化发展。这种设计不仅节省了空间,还为飞行器的整体布局和外观设计提供了更大的灵活性。驱动机构的简化直接导致了控制系统的优化。减少了所需的控制机构数量,这不仅降低了控制的复杂性,而且提高了整个系统的可靠性,使得飞行器的操作更为简便直观。本发明的驱动机构有助于减小飞行器的外形尺寸,使其更加适合微型化设计的需求。
技术特征:
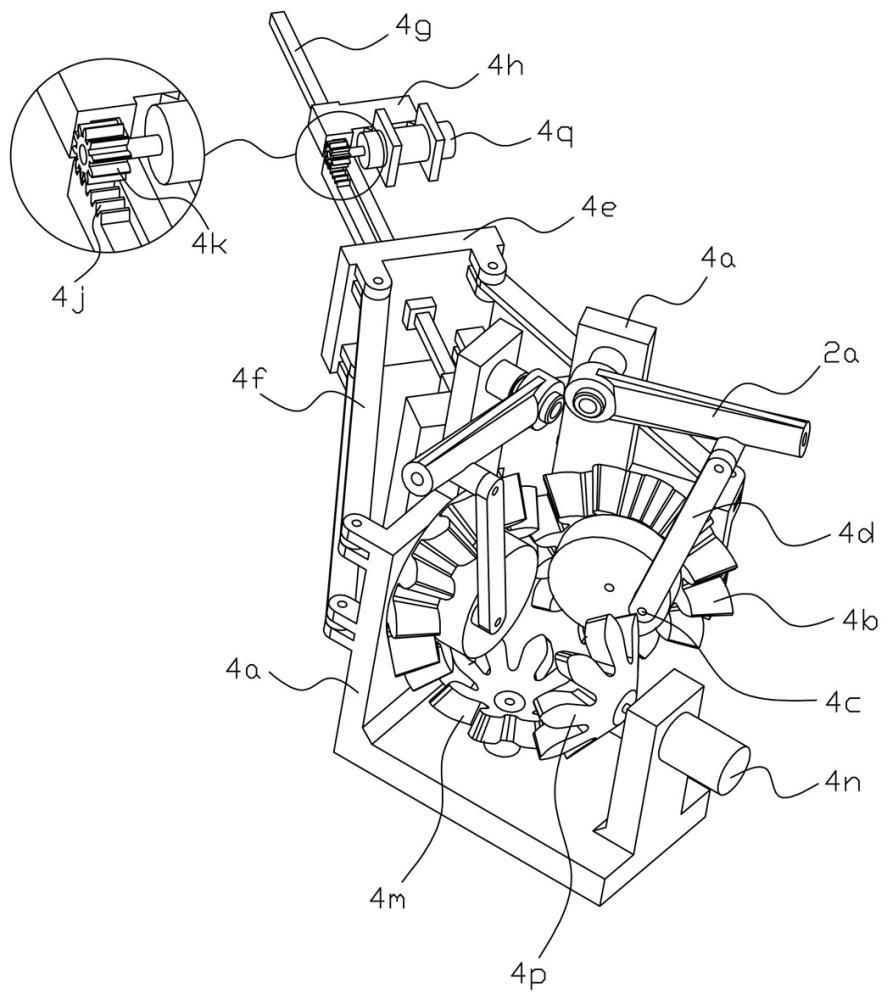
1.翅膀驱动机构,其特征在于:包括以夹角设置的两个摆动座(4a),每个摆动座(4a)上均设置有一个第一伞状齿轮(4b)且第一伞状齿轮(4b)上设置有第一偏心轴(4c),两个第一伞状齿轮(4b)以夹角设置并始终保持啮合状态,每个摆动座(4a)各自连接一翅膀臂且该臂通过第一连杆(4d)与同侧的第一偏心轴(4c)相连,以在第一伞状齿轮(4b)旋转时,所述第一偏心轴(4c)能够随其旋转并带动第一连杆(4d)发生摆动,使得与之相连的翅膀臂发生竖直偏转,从而实现翅膀的上下扑动动作;
2.根据权利要求1所述的翅膀驱动机构,其特征在于:包括位于摆动座(4a)后方的两个前后间隔设置的固定板(4e);
3.根据权利要求2所述的翅膀驱动机构,其特征在于:位置靠后的固定板(4e)中间穿设有主体杆(4g),所述主体杆(4g)的前端固定在位置靠前的固定板(4e)上,所述主体杆(4g)的后端向后延伸并连接有固定架(4h),位置靠后的固定板(4e)后端连接有与主体杆(4g)平行的条形齿条(4j),所述固定架(4h)上设置有可旋转的第二驱动齿轮(4k)且该第二驱动齿轮(4k)与条形齿条(4j)相啮合,以使得条形齿条(4j)能够在第二驱动齿轮(4k)的旋转带动下沿主体杆(4g)方向移动,进而使两个固定板(4e)发生相对位移。
4.根据权利要求1-3中任意一项所述的翅膀驱动机构,其特征在于:其中一个摆动座(4a)上设置有第一伞状驱动齿轮(4m)且第一伞状驱动齿轮(4m)与同一摆动座(4a)上的第一伞状齿轮(4b)相啮合以驱动其旋转。
5.仿生蝴蝶机器人,包括机身(1)、前翅(2)、后翅(3),其特征在于:所述机身(1)前部设置有前翅驱动机构(4)且该前翅驱动机构(4)采用权利要求1-4中任意一项所述的翅膀驱动机构。
6.根据权利要求5所述的仿生蝴蝶机器人,其特征在于:所述机身(1)后部设置有后翅驱动机构(5),所述后翅驱动机构(5)包括后转向座(5a)与设在后转向座(5a)后端的后扑翅驱动机构,所述后扑翅驱动机构包括设在后转向座(5a)后侧的固定座(5b),所述固定座(5b)的下端设置有相互啮合的两个旋转齿轮(5c),每个旋转齿轮(5c)上均设置有第二偏心轴(5d),所述固定座(5b)的顶端通过一旋转轴(5e)共同连接两个后翅(3)的后翅膀臂(3a)且后翅膀臂(3a)通过第二连杆(5f)与第二偏心轴(5d)相连,以在旋转齿轮(5c)旋转时,所述第二偏心轴(5d)能够随其旋转并带动第二连杆(5f)发生摆动,使得与之相连的后翅膀臂(3a)发生竖直偏转,从而实现后翅(3)的上下扑动动作。
7.根据权利要求6所述的仿生蝴蝶机器人,其特征在于:所述两个后翅膀臂(3a)位于同一平面上并相对于旋转轴(5e)左右对称,所述两个后翅膀臂(3a)的旋转轴连接端共同连接一装在旋转轴(5e)上的圆柱形件(5g),所述圆柱形件(5g)沿两个后翅膀臂(3a)所处平面对半切开并分别与两个后翅膀臂(3a)相连。
8.根据权利要求6所述的仿生蝴蝶机器人,其特征在于:所述后转向座(5a)前端连接有用于驱动其水平偏转的后转向驱动机构,所述后转向驱动机构包括设置在后转向座(5a)前端的转向柱(5h)和安装在转向柱(5h)上的转向伞状齿轮(5j),所述后转向座(5a)的前侧设置有安装座(5k)且该安装座(5k)上设置有转向套筒(5m),所述转向柱(5h)转动安装在转向套筒(5m)中,所述安装座(5k)上设置有后伞状驱动齿轮(5n)且该后伞状驱动齿轮(5n)与转向伞状齿轮(5j)啮合以驱动其旋转。
9.根据权利要求8所述的仿生蝴蝶机器人,其特征在于:所述转向伞状齿轮(5j)的周部包括有齿部(5j1)和无齿部(5j2),所述后转向座(5a)的左右两侧均设置有限位柱(5a1),所述安装座(5k)的后端设置有与限位柱(5a1)配合作用以阻止后转向座(5a)过度旋转的挡杆(5k1)且该挡杆(5k1)位于两个限位柱(5a1)之间,所述安装座(5k)与后转向座(5a)之间设置有用于在后伞状驱动齿轮(5n)旋转至转向伞状齿轮(5j)的无齿部(5j2)时,促使后转向座(5a)自动复位的复位机构。
10.根据权利要求9所述的仿生蝴蝶机器人,其特征在于:所述复位机构包括设置在后转向座(5a)上的横杆(5a2)和位于横杆(5a2)左右两端的橡皮筋,所述橡皮筋的另一端连接至安装座(5k)上。
技术总结
翅膀驱动机构及仿生蝴蝶机器人,涉及仿生机器人技术领域。翅膀驱动机构包括以夹角设置的两个摆动座,每个摆动座上均设置有一个第一伞状齿轮且第一伞状齿轮上设置有第一偏心轴,两个第一伞状齿轮以夹角设置并始终保持啮合状态,每个摆动座各自连接一翅膀臂且该臂通过第一连杆与同侧的第一偏心轴相连,以在第一伞状齿轮旋转时,第一偏心轴能够随其旋转并带动第一连杆发生摆动,使得与之相连的翅膀臂发生竖直偏转,从而实现翅膀的上下扑动动作;两个摆动座被配置为能够沿水平方向发生相对摆动,以带动翅膀臂发生水平偏转,从而实现翅膀的前后收展动作。本发明结构紧凑,既能有效控制翅膀扑动,又能实现收展动作。
技术研发人员:杜雪林,叶知力,罗靖,祝强,罗明昊
受保护的技术使用者:湖南工学院
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!