结构紧凑、抗冲击的共轴反浆无人机矢量控制机构
本发明属于无人机控制,涉及结构紧凑、抗冲击的共轴反浆无人机矢量控制机构。
背景技术:
1、无人机具有对场地要求低、使用便捷和垂直起降等优点,具有巨大的前景。传统的无人直升机因为需要平衡反作用扭矩与控制航向不得不布置尾桨,从而导致无人机结构复杂、体积过大、稳定性差等缺点。而共轴矢量控制机构采用双旋翼结构,两个方向相同但转速相反的旋翼可以有效平衡转矩而不需要再布置尾桨。
2、现有的共轴无人机采用倾斜盘系统控制转向,使用三个舵机控制倾斜盘的偏转进而控制无人机的位姿,其不足之处在于结构不紧凑、尺寸较大以及难以抵抗冲击。
技术实现思路
1、本发明的目的是提供结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,解决了现有无人机存在的结构不紧凑、体积较大以及抗冲击能力差的问题。
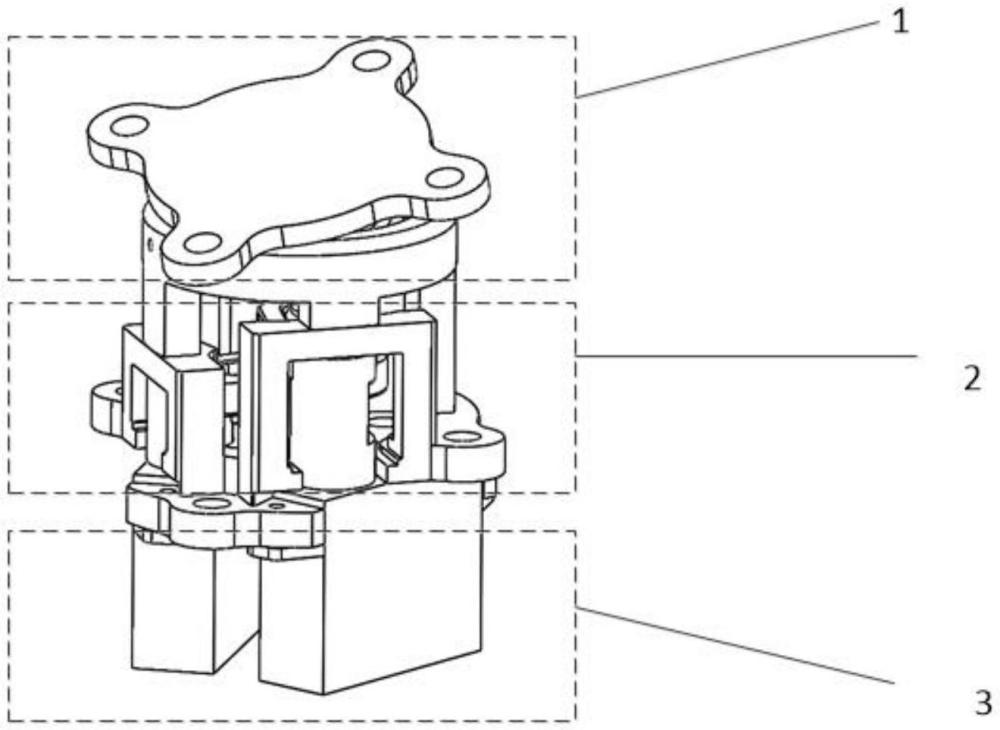
2、本发明所采用的技术方案是,结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,包括从上至下依次连接的电机座单元、驱动臂机构及动力组件。
3、本发明的特点还在于:
4、电机座单元包括电机座,电机座的中心处设有驱动连接组件,驱动连接组件外部同轴套接有中间圈,驱动连接组件与驱动臂机构连接。
5、驱动连接组件包括依次连接的套环a、球形件a、球形件b,套环a通过销钉a与中间圈连接。
6、驱动臂机构包括俯仰驱动臂和横滚驱动臂,俯仰驱动臂与球形件b配合;横滚驱动臂与球形件a配合;
7、驱动臂机构还包括环形固定基座,环形固定基座的底部四周通过支杆连接在连接座上;中间圈的外壁通过销钉b与环形固定基座连接。
8、俯仰驱动臂上设有条形滑槽a,球形件b嵌套在条形滑槽a中;俯仰驱动臂的一端加工有齿圈a;
9、横滚驱动臂上设有条形滑槽b,球形件a嵌套在条形滑槽b中;横滚驱动臂的一端加工有齿圈b。
10、动力组件包括舵机a和舵机b,俯仰驱动臂上的齿圈a与舵机b驱动轴上的外齿啮合;横滚驱动臂上的齿圈b与舵机a驱动轴上的外齿啮合。
11、舵机a的上端相对两侧分别设有连接板a,舵机a上的两个连接板a分别与连接座一侧的两端连接;舵机b的上端相对两侧分别设有连接板b,舵机b上的两个连接板b分别与连接座另一侧的两端连接。
12、本发明的有益效果是,本发明提供的结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,该矢量控制机构的动力由装在同一固定基座两侧的两个舵机提供,两个舵机分别控制驱动臂的摆动,共同控制电机座的位姿,从而实现无人机的俯仰与横滚运动。本发明具有结构紧凑、体积小、抗冲击、可靠性高的特点,适用于小型无人机系统。
技术特征:
1.结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,其特征在于:包括从上至下依次连接的电机座单元(1)、驱动臂机构(2)及动力组件(3)。
2.根据权利要求1所述的结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,其特征在于:所述电机座单元(1)包括电机座(4),电机座(4)的中心处设有驱动连接组件,驱动连接组件外部同轴套接有中间圈(5),所述驱动连接组件与驱动臂机构(2)连接。
3.根据权利要求2所述的结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,其特征在于:所述驱动连接组件包括依次连接的套环a(13)、球形件a(14)、球形件b(15),套环a(13)通过销钉a(16)与中间圈(5)连接。
4.根据权利要求3所述的结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,其特征在于:所述驱动臂机构(2)包括俯仰驱动臂(7)和横滚驱动臂(8),俯仰驱动臂(7)与球形件b(15)配合;横滚驱动臂(8)与球形件a(14)配合;
5.根据权利要求4所述的结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,其特征在于:所述俯仰驱动臂(7)上设有条形滑槽a(7-2),球形件b(15)嵌套在条形滑槽a(7-2)中;俯仰驱动臂(7)的一端加工有齿圈a(7-1);
6.根据权利要求5所述的结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,其特征在于:所述动力组件(3)包括舵机a(9-1)和舵机b(9-2),俯仰驱动臂(7)上的齿圈a(7-1)与舵机b(9-2)驱动轴上的外齿啮合;横滚驱动臂(8)上的齿圈b(8-2)与舵机a(9-1)驱动轴上的外齿啮合。
7.根据权利要求6所述的结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,其特征在于:所述舵机a(9-1)的上端相对两侧分别设有连接板a(9-3),舵机a(9-1)上的两个连接板a(9-3)分别与连接座(6-2)一侧的两端连接;舵机b(9-2)的上端相对两侧分别设有连接板b(9-4),舵机b(9-2)上的两个连接板b(9-4)分别与连接座(6-2)另一侧的两端连接。
技术总结
本发明公开了结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,包括从上至下依次连接的电机座单元、驱动臂机构及动力组件。本发明提供的结构紧凑、抗冲击的共轴反浆无人机矢量控制机构,该矢量控制机构的动力由装在同一固定基座两侧的两个舵机提供,两个舵机分别控制驱动臂的摆动,共同控制电机座的位姿,从而实现无人机的俯仰与横滚运动。本发明具有结构紧凑、体积小、抗冲击、可靠性高的特点,适用于小型无人机系统。
技术研发人员:刘彦伟,黄文清,陈哲洋,李江超,李鹏阳,李淑娟
受保护的技术使用者:西安理工大学
技术研发日:
技术公布日:2024/10/17
- 还没有人留言评论。精彩留言会获得点赞!