矢量螺旋桨驱动的水空跨介质仿生飞行器
本发明特别涉及一种矢量螺旋桨驱动的水空跨介质仿生飞行器,属于仿生飞行器。
背景技术:
1、跨介质飞行器是指具备跨越水空介质机动航行能力的新概念特种机器人,受水和空气介质影响,单介质机器人在不同介质中的运动特性、目标特性有较大差异。其中,水下航行续航能力强,但阻力大、速度慢;空中飞行阻力小、速度快,但同尺度下续航能力弱。跨介质飞行器灵活运用水空介质跨域优势,可实现反复切换,形成颠覆性的无人任务能力,成为未来海上无人体系中新质力量增长点。跨介质飞行器根据出水方式,分为水上滑越、垂直起降、弹射出水等类型,入水方式按照是否是水面停留,分为直接入水和间接入水。
2、基于多旋翼构型的跨介质飞行器多采用垂直起降的分步式入水和分步式出水,经过水面过度阶段完成介质跨越。基于固定翼构型飞行器多采用间接入水,在入水时以一定的速度在水面滑翔,起飞阶段采用水上滑越、弹射出水等方式。许多跨介质飞行器采用了变体结构,在跨介质前改变飞行器结构,以减小入水时所受的冲击,同时也为了在适应不同的介质中的运动。
3、尽管多旋翼构型飞行器的跨介质运动方式较为简单,只需要依靠螺旋桨产生升力进行垂直升空或降落,然而螺旋桨叶难以在不同介质下发挥出最佳力效;固定翼构型飞行器出水一般依靠配套的发射架或瞬时动力单元提供的强大推力,改变飞行器姿态,使机身轴线垂直于水面向上,依靠螺旋桨或其他装置产生的推力出水,动力单元冗余,能量耗损大。而传统扑翼构型飞行器尽管在外型上最符合大自然规则,然而当前单一扑动机构难以提供出水或水下航行所需的升推力,难以实现跨介质运动,仅仅水的粘滞力和冲击力就对飞行器提出了诸多挑战。
4、具体来说,当前已公开报道的跨介质飞行器虽然都属于欠驱动控制方式,但其位姿及动力单元数量较多,结构与机构复杂,可靠运动控制难度高,跨介质作业时能耗大,难以实现高机动、长时间、稳定续航要求。受到水粘滞力等阻力的影响,当前已公开报道的扑翼构型跨介质飞行器在机理上存在出入水困难,鲜有飞行器实物样机能够实现水介质自由穿越。目前绝大多数的跨介质飞行器只能实现空中飞行和水面漂浮,无法实现完成沉浸于水中。依靠螺旋桨驱动的固定翼构型跨介质飞行器在水中起飞时需要主动改变飞行器姿态,保证螺旋桨给飞行器提供竖直向上的力,以克服水的粘滞力,从而实现跨介质。水下发射飞行器需要依靠弹射装置进行弹射出水,配套结构复杂且成本较高。
技术实现思路
1、针对现有的大多数扑翼构型的仿生跨介质飞行器在水面以下航行时或跨介质时的驱动力较差,且难以实现持续稳定的飞行等问题,本发明的主要目的在于提供一种可沉浸于水中自由航行、不需要配套发射结构就能实现跨介质的高实用性仿生扑翼构型跨介质飞行器,本发明在保留了扑翼构型的优势后,以矢量螺旋桨的形式为跨介质飞行器的水下航行和跨介质提供驱动力,为了适应不同介质并减少冲击,从仿生的角度收缩机翼,大大提高了仿生扑翼构型跨介质飞行器的实用性,从而克服现有技术中的不足。
2、为实现前述发明目的,本发明采用的技术方案包括:
3、本发明实施例提供了一种矢量螺旋桨驱动的水空跨介质仿生飞行器,包括机身、机翼、尾翼、扑翼驱动系统,所述机翼、所述尾翼、所述扑翼驱动系统装配在所述机身上,所述扑翼驱动系统与所述机翼传动连接,并用于驱使所述机翼执行扑动运动以及改变所述机翼的后掠角;
4、以及,该矢量螺旋桨驱动的水空跨介质仿生飞行器还包括:螺旋桨和矢量驱动系统,所述螺旋桨和所述矢量驱动系统装配在所述机身上,所述螺旋桨、所述尾翼与所述机身活动配合,所述矢量驱动系统与所述螺旋桨、所述尾翼传动配合,并至少能够实现如下功能:
5、a.驱使所述螺旋桨绕自身轴线做旋转运动;
6、b.驱使所述螺旋桨整体绕第一水平轴线上下扭转而使所述螺旋桨在第一初始姿态、第一变形姿态、第二变形姿态之间转变,驱使所述螺旋桨整体绕第一竖直轴线左右扭转而使所述螺旋桨在第一初始姿态、第三变形姿态、第四变形姿态之间转变;
7、c.驱使所述尾翼整体绕第二水平轴线上下扭转而使所述尾翼在第二初始姿态、第五变形姿态、第六变形姿态之间转变,驱使所述尾翼整体绕第二竖直轴线左右扭转而使所述尾翼在第二初始姿态、第七变形姿态、第八变形姿态之间转变;
8、所述螺旋桨、所述尾翼与所述矢量驱动系统配合,使所述水空跨介质仿生飞行器至少具有如下五种运动状态:
9、直线运动状态:所述螺旋桨处于第一初始姿态、所述尾翼处于第二初始姿态,所述螺旋桨旋转产生的推力使所述水空跨介质仿生飞行器直线向前运动;
10、上浮运动状态:所述螺旋桨处于第一变形姿态,所述尾翼处于第六变形姿态,旋转的螺旋桨和尾翼使所述水空跨介质仿生飞行器整体产生向上偏转的抬头力矩,并实现上浮运动;
11、下沉运动状态:所述螺旋桨处于第二变形姿态,所述尾翼处于第五变形姿态,旋转的螺旋桨和尾翼使所述水空跨介质仿生飞行器整体产生向下偏转的低头力矩,并实现下沉运动;
12、左偏航运动状态:所述螺旋桨处于第三变形姿态,所述尾翼处于第七变形姿态,旋转的螺旋桨和尾翼使所述水空跨介质仿生飞行器整体产生向左偏航的左转力矩,并实现左偏航运动;
13、右偏航运动状态:所述螺旋桨处于第四变形姿态,所述尾翼处于第八变形姿态,旋转的螺旋桨和尾翼使所述水空跨介质仿生飞行器整体产生向右偏航的右转力矩,并实现右偏航运动。
14、与现有技术相比,本发明的优点包括:
15、本发明实施例提供的一种矢量螺旋桨驱动的水空跨介质仿生飞行器,采用该仿生外形,可实现拟态飞行,具有高机动性、视觉隐蔽性等一些仿生扑翼传统优势,其仿生机翼做为空中运动时升力的主要来源,并且,该机翼可进行收缩,收缩后的机翼面积与翼展等物理结构减小,逐渐改变为仿飞鱼气动布局,有效减小了飞行器在水下航行时受到的阻力,以及机翼受到的冲击力和水的粘滞力。
16、本发明实施例提供的一种矢量螺旋桨驱动的水空跨介质仿生飞行器,具有多功能矢量动力系统,针对飞行器在空中、水下两种介质下不同的位置姿态控制,采用驱使螺旋桨摆动与尾翼连杆联动方式,仅使用一组驱动模块实现多自由度的方向调控,实现了水下潜航、跨介质(抛投/入水、空中/水下、潜射/出水:水下至空中)、空中巡航等多模态下长续航(对比于同尺度/重量下仿生飞行器)运行。
17、本发明实施例提供的一种矢量螺旋桨驱动的水空跨介质仿生飞行器,具有简单有效的收缩翼翅机构,通过改变翼翅物理形态,实现飞行器本体完成空中仿鸟气动布局与水下仿飞鱼气动布局切换,并完成配合矢量动力机构实现高效节能运行模式。
技术特征:
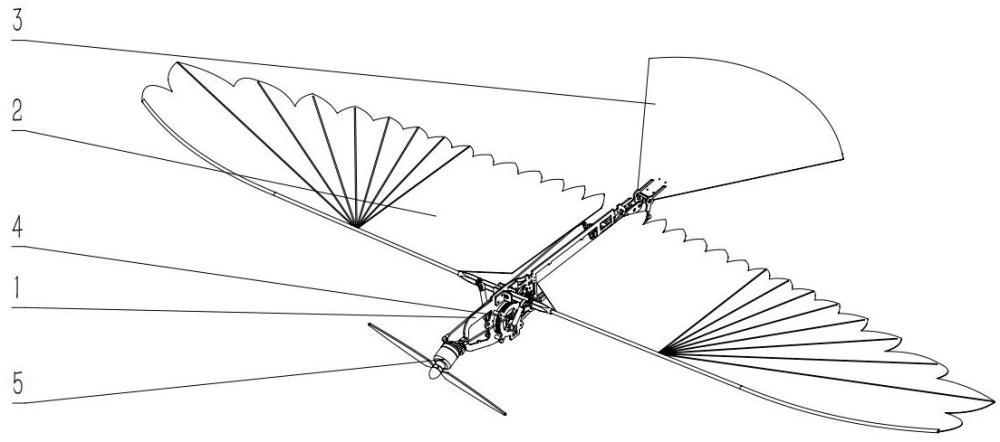
1.一种矢量螺旋桨驱动的水空跨介质仿生飞行器,包括机身(1)、机翼(2)、尾翼(3)、扑翼驱动系统(4),所述机翼(2)、所述尾翼(3)、所述扑翼驱动系统(4)装配在所述机身(1)上,所述扑翼驱动系统(4)与所述机翼(2)传动连接,并用于驱使所述机翼(2)执行扑动运动以及改变所述机翼(2)的后掠角;
2.根据权利要求1所述矢量螺旋桨驱动的水空跨介质仿生飞行器,其特征在于:
3.根据权利要求1或2所述矢量螺旋桨驱动的水空跨介质仿生飞行器,其特征在于:所述螺旋桨(501)位于所述机身(1)的头部,所述尾翼(3)位于所述机身(1)的尾部,当所述螺旋桨(501)处于第一初始姿态、所述尾翼(3)处于第二初始姿态时,所述螺旋桨(501)、所述尾翼(3)的中轴线与所述机身(1)的中轴线重合。
4.根据权利要求1或2所述矢量螺旋桨驱动的水空跨介质仿生飞行器,其特征在于:所述矢量驱动系统(5)包括第一驱动模块(502)、第二驱动模块、第三驱动模块、第一矢量传动结构、第二矢量传动结构,所述第一驱动模块(502)与所述螺旋桨(501)传动连接,并用于驱使所述螺旋桨(501)绕自身轴线旋转,所述第二驱动模块经所述第一矢量传动结构与所述螺旋桨(501)传动连接,并用于驱使所述螺旋桨(501)绕第一水平轴线上下扭转以及绕第一竖直轴线左右扭转,所述第三驱动模块经所述第二矢量传动结构与所述尾翼(3)传动连接,并用于驱使所述尾翼(3)绕第二水平轴线上下扭转以及绕第二竖直轴线左右扭转。
5.根据权利要求4所述矢量螺旋桨驱动的水空跨介质仿生飞行器,其特征在于:所述第一矢量传动结构包括间隔且并行设置的第一矢量拉杆(5051)和第二矢量拉杆(5052),所述第一矢量拉杆(5051)、所述第二矢量拉杆(5052)的一端与所述螺旋桨(501)连接,另一端与所述第二驱动模块连接,并且,所述第二驱动模块用于驱使所述第一矢量拉杆(5051)、所述第二矢量拉杆(5052)沿自身长度方向做往复直线运动,通过调节所述第一矢量拉杆(5051)、所述第二矢量拉杆(5052)的运动方向而使所述螺旋桨(501)相对于所述机身(1)上、下、左、右扭转。
6.根据权利要求5所述矢量螺旋桨驱动的水空跨介质仿生飞行器,其特征在于:所述第一驱动模块(502)固定在基座(503)上,基座(503)固定在转向结(504)上,转向结(504)与机身(1)活动连接,所述第一矢量拉杆(5051)和所述第二矢量拉杆(5052)与所述基座(503)连接,所述基座(503)、所述第一驱动模块(502)以及所述螺旋桨(501)整体被所述第二驱动模块驱使,并相对于所述机身(1)上、下、左、右扭转。
7.根据权利要求6所述矢量螺旋桨驱动的水空跨介质仿生飞行器,其特征在于:所述第二矢量传动结构包括第三矢量拉杆(301)和第四矢量拉杆(302),所述第三矢量拉杆(301)、所述第四矢量拉杆(302)的一端与所述尾翼(3)连接,另一端与所述第三驱动模块连接,并且,所述第三矢量拉杆(301)、所述第四矢量拉杆(302)相对位于所述尾翼(3)的两侧,所述第三驱动模块用于驱使所述第三矢量拉杆(301)、所述第四矢量拉杆(302)沿自身长度方向做往复直线运动,通过调节所述第三矢量拉杆(301)、所述第四矢量拉杆(302)的运动方向而使所述尾翼(3)相对于所述机身(1)上、下、左、右扭转。
8.根据权利要求7所述矢量螺旋桨驱动的水空跨介质仿生飞行器,其特征在于:所述第二驱动模块和所述第三驱动模块均包括两个旋转舵机,每一旋转舵机的旋转输出轴上固定有一舵臂,所述舵臂与所述第一矢量拉杆(5051)、所述第二矢量拉杆(5052)、所述第三矢量拉杆(301)或所述第四矢量拉杆(302)枢轴连接;
9.根据权利要求1所述矢量螺旋桨驱动的水空跨介质仿生飞行器,其特征在于:所述扑翼驱动系统(4)包括第四驱动模块、第五驱动模块、扑动运动传动结构和收缩运动传动结构,所述第四驱动模块经所述扑动运动传动结构与所述机翼(2)传动配合,并实现所述机翼(2)的扑动运动,所述第五驱动模块经所述收缩运动传动结构与所述机翼(2)传动配合,并实现所述机翼(2)的收缩运动,从而改变所述机翼(2)的后掠角。
10.根据权利要求8所述矢量螺旋桨驱动的水空跨介质仿生飞行器,其特征在于:所述机翼(2)的机翼骨架包括翼肩(405)以及与翼肩(405)枢轴连接的两个机翼支撑部件(201、202),所述机身(1)上设置有导轨(101),所述收缩运动传动结构包括两个收缩杆(703、705)和滑块(702),所述滑块(702)与所述导轨(101)活动配合,所述两个收缩杆(703、705)分别与所述滑块(702)、收缩杆(703、705)枢轴连接;
技术总结
本发明公开了一种矢量螺旋桨驱动的水空跨介质仿生飞行器。该矢量螺旋桨驱动的水空跨介质仿生飞行器,包括机身、机翼、尾翼、扑翼驱动系统,所述机翼、所述尾翼、所述扑翼驱动系统装配在所述机身上,所述扑翼驱动系统与所述机翼传动连接,并用于驱使所述机翼执行扑动运动以及改变所述机翼的后掠角;以及,该矢量螺旋桨驱动的水空跨介质仿生飞行器还包括:螺旋桨和矢量驱动系统,所述螺旋桨和所述矢量驱动系统装配在所述机身上,所述螺旋桨、所述尾翼与所述机身活动配合,所述矢量驱动系统与所述螺旋桨、所述尾翼传动配合。该飞行器/机器人在水中由矢量螺旋桨推动,推力更大、机动性更强。
技术研发人员:胡益民,李加东,郭亚飞,刘昕昊
受保护的技术使用者:中国科学院苏州纳米技术与纳米仿生研究所
技术研发日:
技术公布日:2024/11/14
- 还没有人留言评论。精彩留言会获得点赞!