一种双驱动结构的仿生蝴蝶扑翼飞行器
本发明涉及仿生扑翼飞行器,具体的说是一种双驱动结构的仿生蝴蝶扑翼飞行器。
背景技术:
1、传统的扑翼飞行器是指像鸟—样通过机翼主动运动产生升力和前行力的飞行器,其以翅膀作为主运动,通过翅膀拍打空气的反力作为升力和前进力,并通过改变尾翼的位置运动来改变飞行方向。
2、一方面,现阶段的仿生扑翼飞行器主要是模仿鸟类和昆虫两种方向,且大多数研究都以鸟类扑翼飞行器为主,例如:festo公司生产martbird、法国航空工程师edwin vanruymbeke研制的metafly,其飞行实战功能等方面都取得了很大的成功。然而,以昆虫为原型的仿生扑翼飞行器,尤其是以蝴蝶为原型的扑翼飞行器在理论研究和结构设计上都存在较大的缺陷,虽然现阶段已知的仿生蝴蝶扑翼机器人有festo的通过压电驱动的emotionbutterfly、北京航空航天大学的双翼独立驱动的新型仿生蝴蝶飞行器,但均属于双翼独立驱动,且只能通过微控制系统实现转向。
3、另一方面,按照升力产生的原理和气动布局的方式可以把微型飞行器分为固定翼微型飞行器、旋翼微型飞行器和扑翼微型飞行器三大类。固定翼微型飞行器以固定的机翼为升力的主要来源,通常采用螺旋桨产生拉力或推力,使固定的机翼与气流产生相对运动,进而使具有一定攻角和弯度的机翼上、下表面产生压力差,产生升力。旋翼微型飞行器的飞行原理类似于直升飞机,由高速旋转的旋翼与气流产生相对运动,从而产生升力,通过调整旋翼平面的倾斜角度实现飞行方向的调整,因此旋翼微型飞行器能够实现垂直起降、悬停、侧飞甚至后飞。然而,扑翼微型飞行器是基于仿生学原理建立起来的一类特殊飞行器,采用与鸟类或昆虫相似的扑翼飞行模式,依靠双翼的扑动与空气产生相对运动,能够同时产生升力和推力,具有极高的气动效率,扑翼飞行机器人独特的空气动力学原理和高机动性、高灵活性使其成为微小飞行机器人领域研究的新热点。目前,采用扑翼飞行原理设计的仿鹰、仿鸽子、仿蜂鸟、仿蜻蜓等多种生物的仿生扑翼机器人已经有所技术进步,但其飞行稳定性与飞行效率较低,成本居高不下,并无法适用于复杂多变的环境,从而使仿生飞行机器人在民用领域、科学领域参与度较低。
4、针对以上问题,我们提出了一种仿生蝴蝶微型飞行器,用以解决上述问题。
技术实现思路
1、针对现有技术中存在的上述不足之处,本发明目的是提供一种双驱动结构的仿生蝴蝶扑翼飞行器,用于解决现有的飞行器飞行稳定性与飞行效率较低,成本居高不下,并无法适用于复杂多变的环境的问题。
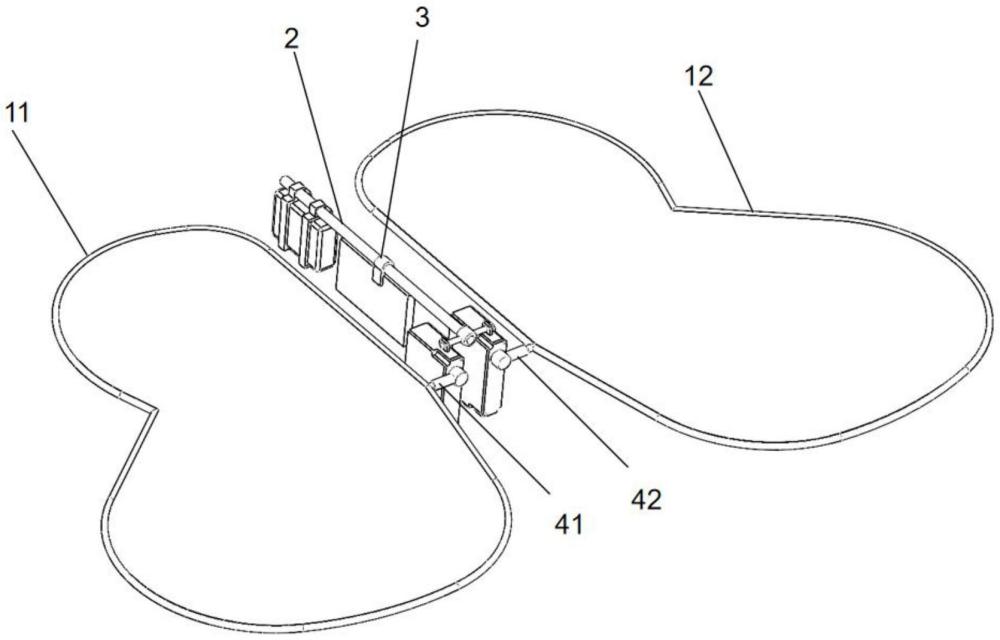
2、本发明为实现上述目的所采用的技术方案是:一种双驱动结构的仿生蝴蝶扑翼飞行器,扑翼飞行器本体包括两舵机、左翅膀骨架、右翅膀骨架、主躯干组件、控制组件以及电池,两所述舵机包括第一舵机与第二舵机,所述第一舵机与所述第二舵机均通过一舵机悬挂组件固定在所述主躯干组件前端的左右两侧上,所述左翅膀骨架通过一左翅膀连接组件设置在第一舵机上,所述第一舵机在工作状态使所述左翅膀骨架快速扑动;所述右翅膀骨架通过一右翅膀连接组件设置在第二舵机上,所述第二舵机在工作状态使所述右翅膀骨架快速扑动。所述控制组件通过一主控板悬挂组件设置在所述主躯干组件的中部,且所述第一舵机、所述第二舵机均与所述控制组件、所述电池通过导线连接,其中所述电池设置在所述主躯干组件的尾端。
3、为了进一步提高双驱动结构的仿生蝴蝶扑翼飞行器的使用便利性,本发明采用的方案是:所述扑翼飞行器本体的整体结构呈对称分布。
4、为了进一步提高双驱动结构的仿生蝴蝶扑翼飞行器的使用便利性,本发明采用的方案是:所述控制组件包括主控板、伺服控制板与电位器,所述主控板与所述伺服控制板之间通过数字量输入信号传输接线连接,所述伺服控制板的相应接口与所述电位器的输出端相连接。
5、为了进一步提高双驱动结构的仿生蝴蝶扑翼飞行器的使用便利性,本发明采用的方案是:所述左翅膀骨架与所述右翅膀骨架由多根碳纤维杆依次连接构成。
6、为了进一步提高双驱动结构的仿生蝴蝶扑翼飞行器的使用便利性,本发明采用的方案是:所述左翅膀骨架与所述右翅膀骨架的翼面材料均采用tup薄膜制成。
7、为了进一步提高双驱动结构的仿生蝴蝶扑翼飞行器的使用便利性,本发明采用的方案是:所述电池通过两电池固定组件固定设置在所述主躯干组件的尾端,其中第一电池固定组件固定连接在所述电池的前侧,第二电池固定组件固定连接在所述电池的后侧。
8、为了进一步提高双驱动结构的仿生蝴蝶扑翼飞行器的使用便利性,本发明采用的方案是:所述舵机悬挂组件对称固定在所述主躯干组件的左右两侧。
9、本发明的有益效果:
10、(1)本发明易加工制作,便于拆装,采用双舵机驱动,闭环控制系统控制飞行,具有较好的飞行稳定性,能够适用于复杂多变的飞行环境,具有较好的隐蔽性。
11、(2)本发明在民用领域可以成为一种集通讯、监测以及救援的多功能工具,例如:在自然灾害或人为事故等紧急情况下,能够提供及时、准确以及全面地监测数据如拍摄现场图像、测量环境参数等。
技术特征:
1.一种双驱动结构的仿生蝴蝶扑翼飞行器,扑翼飞行器本体(1)包括两舵机、左翅膀骨架(11)、右翅膀骨架(12)、主躯干组件(2)、控制组件(7)以及电池(8),两所述舵机包括第一舵机(51)与第二舵机(52),所述第一舵机(51)与所述第二舵机(52)均通过一舵机悬挂组件(6)固定在所述主躯干组件(2)前端的左右两侧上,其特征在于:
2.根据权利要求1所述的一种双驱动结构的仿生蝴蝶扑翼飞行器,其特征在于:所述扑翼飞行器本体(1)的整体结构呈对称分布。
3.根据权利要求2所述的一种双驱动结构的仿生蝴蝶扑翼飞行器,其特征在于:所述控制组件(7)包括主控板、伺服控制板与电位器,所述主控板与所述伺服控制板之间通过数字量输入信号传输接线连接,所述伺服控制板的相应接口与所述电位器的输出端相连接。
4.根据权利要求2所述的一种双驱动结构的仿生蝴蝶扑翼飞行器,其特征在于:所述左翅膀骨架(11)与所述右翅膀骨架(12)由多根碳纤维杆依次连接构成。
5.根据权利要求4所述的一种双驱动结构的仿生蝴蝶扑翼飞行器,其特征在于:所述左翅膀骨架(11)与所述右翅膀骨架(12)的翼面材料均采用tup薄膜制成。
6.根据权利要求1所述的一种双驱动结构的仿生蝴蝶扑翼飞行器,其特征在于:所述电池(8)通过两电池固定组件固定设置在所述主躯干组件(2)的尾端,其中第一电池固定组件(91)固定连接在所述电池(8)的前侧,第二电池固定组件(92)固定连接在所述电池(8)的后侧。
7.根据权利要求1所述的一种双驱动结构的仿生蝴蝶扑翼飞行器,其特征在于:所述舵机悬挂组件(6)对称固定在所述主躯干组件(2)的左右两侧。
技术总结
一种双驱动结构的仿生蝴蝶扑翼飞行器,第一舵机与第二舵机均通过舵机悬挂组件固定在主躯干组件前端,左翅膀骨架通过左翅膀连接组件设置在第一舵机上,右翅膀骨架通过右翅膀连接组件设置在第二舵机上,第一舵机、第二舵机在工作状态分别使左翅膀骨架、右翅膀骨架快速扑动;控制组件通过主控板悬挂组件设置在主躯干组件的中部,且第一舵机、第二舵机均与控制组件、电池通过导线连接,其中电池设置在主躯干组件的尾端。本发明采用双舵机驱动结构,闭环系统控制飞行,具有较好的飞行稳定性,而且其仿生蝴蝶外形在涂装后具有较好的隐蔽性,在军事领域可以在复杂多变的战场环境中执行各种任务,在民用领域可以进行通讯、监测及救援的辅助工作。
技术研发人员:刘韬,汪东兴,蔡华宏,戴泽煜,洪胜涛
受保护的技术使用者:安徽工业大学
技术研发日:
技术公布日:2024/12/19
- 还没有人留言评论。精彩留言会获得点赞!