一种兼具检测和投掷功能的无人机
本发明涉及无人机领域,具体涉及一种兼具检测和投掷功能的无人机。
背景技术:
1、无人机,即无人驾驶飞行器(unmanned aerial vehicle),它是一种自带动力,能搭载各种电子设备,执行多种任务,可由操作员通过无线电远程遥控设备进行操纵或由无人机自带的自动遥控程序装置进行自我操纵的无人驾驶的航空器;无人机最大的特点就是不需要飞行员在机身内进行驾驶操纵,同时又能完成载人飞行器的几乎全部功能;因此,无人机不需要安装飞行员座椅,操纵杆等能使飞行员完成飞机操纵功能的装置,也不需要安装座舱增压系统等载人飞行器维持飞行员生命所必须的装置,结构重量轻、结构简单、易操作、使用成本低、使用时安全高效等都是无人机所具有的特点;
2、近一个世纪以来,无人机以其低损耗、零伤亡、高机动性等优势,在民用和科学研究两大领域发挥着重要作用,但现有的无人机还存在着投放不精确、制空时间短、飞行覆盖面积小等缺陷。
技术实现思路
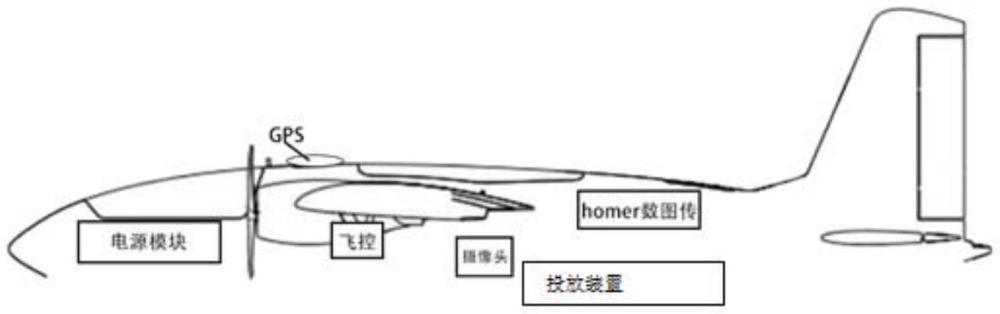
1、本发明的目的是提供一种兼具检测和投掷功能的无人机,包括:飞控模块、动力模块、图像采集模块、数图传通信模块、定位导航系统和投掷装置。
2、所述飞控模块接收到飞行指令后,生成控制无人机的飞行轨迹和姿态的信号及物品投放信号,并将控制无人机的飞行轨迹和姿态的信号传输给动力模块,将物品投放信号传输给投掷装置。
3、所述控制无人机的飞行轨迹和姿态的信号包括转向控制信号、转向角度控制信号、飞行速度控制信号。
4、当动力模块接收到转向控制信号和转向角度控制信号后,驱动无人机转向,并根据转向角度控制信号调控无人机转向角度。
5、当动力模块接收到飞行速度控制信号后,调控无人机飞行速度。
6、所述图像采集模块用于采集无人机所在环境的图像及无人机下方的图像,并将采集到的图像传递给数图传通信模块。
7、所述数图传通信模块用于将图像采集模块采集的图像信息回传至地面站。
8、所述地面站对接收的图像信息进行处理,生成飞行指令,并将飞行指令传输至无人机的飞控模块。
9、所述定位导航系统用于定位物品投掷点。
10、所述投掷装置接收物品投放信号后,投掷无人机搭载的物品。
11、所述无人机装载有动力模块、图像采集模块、飞控模块、数图传通信模块、定位导航系统和投掷装置。
12、进一步,所述无人机还装载有电源模块。
13、所述电源模块为飞控模块、动力模块、图像采集模块、数图传通信模块、定位导航系统和投掷装置供电。
14、进一步,所述数图传通信模块回传图像采集模块采集的图像信息采用的是opencv数字识别算法。
15、进一步,所述opencv数字识别算法的步骤包括:
16、1)将采集的图像的rgb信息转化到hsv颜色空间,来识别目标的颜色。
17、2)提取hsv颜色空间内红、蓝颜色区域的最小外接矩形,并转化为二值图像,得到矩形二值图像。
18、3)将矩形二值图像储存在定义的vector容器当中。
19、4)准备0~9十个数字的模板图片,并转化为二值图像,得到模板二值图像。
20、5)将vector容器中的矩形二值图像与模板二值图像进行像素对比,得出相似度。
21、6)比较各矩形二值图像与模板二值图像的相似度,相似度最高值对应的模板图片数字为识别出的数字。
22、进一步,设定无人机的默认坐标系与地图坐标系保持一致。
23、所述定位导航系统采用动点比较修正算法进行偏差修正。
24、进一步,所述动点比较修正算法的步骤包括:
25、1)设定无人机起飞位置为(x0,y0),目标点位置为(xi,yi),i为目标点序数,i=1,2,…,n,n为目标点总数。
26、2)无人机飞向目标点(xi,yi),无人机到达的实际位置为(x′i,y′i)。
27、3)无人机对于目标图像的识别点为(x″i,y″i)。
28、4)比较实际位置(x′i,y′i)和无人机识别点(x″i,y″i),对无人机的位置偏差进行修正。
29、本发明的技术效果是毋庸置疑的,本发明设计的无人机系统手动起飞,地面站上传任务,到达任务区域后切换任务模式,实现自主飞行、对地侦察、数据回传、图像处理、目标识别、自主投放等功能,利用舵机驱动的投掷装置完成自动投放任务。本发明的无人机功能稳定,主控与传感器工作正常,能按要求完成自主检测及投放的任务。
30、本发明设计的无人机表现出了很高的检测精确度和即时投放精度,实现了无人机的自主飞行、航路规划、图像采集、航路规划、图像处理、目标识别、精确投放等功能。本发明设计的无人机具备覆盖范围大、制空时间长、时效性强等性能优势。
技术特征:
1.一种兼具检测和投掷功能的无人机,其特征在于,包括:飞控模块、动力模块、图像采集模块、数图传通信模块、定位导航系统和投掷装置;
2.根据权利要求1所述的一种兼具检测和投掷功能的无人机,其特征在于,所述无人机还装载有电源模块;
3.根据权利要求1所述的一种兼具检测和投掷功能的无人机,其特征在于,所述数图传通信模块回传图像采集模块采集的图像信息采用的是opencv数字识别算法。
4.根据权利要求3所述的一种兼具检测和投掷功能的无人机,其特征在于,所述opencv数字识别算法的步骤包括:
5.根据权利要求1所述的一种兼具检测和投掷功能的无人机,其特征在于,设定无人机的默认坐标系与地图坐标系保持一致;
6.根据权利要求5所述的一种兼具检测和投掷功能的无人机,其特征在于,所述动点比较修正算法的步骤包括:
技术总结
一种兼具检测和投掷功能的无人机,包括:飞控模块、动力模块、图像采集模块、数图传通信模块、定位导航系统和投掷装置。本发明设计的无人机系统手动起飞,地面站上传任务,到达任务区域后切换任务模式,利用舵机驱动的投掷装置完成自动投放任务。本发明的无人机功能稳定,主控与传感器工作正常,能按要求完成自主检测及投放的任务。本发明设计的无人机表现出了很高的检测精确度和即时投放精度,实现了无人机的自主飞行、航路规划、图像采集、航路规划、图像处理、目标识别、精确投放等功能。本发明设计的无人机具备覆盖范围大、制空时间长、时效性强等性能优势。
技术研发人员:王雅平,王超,鹿珂珂,郭振云,寇昆湖,苏艳琴,刘登攀
受保护的技术使用者:中国人民解放军海军航空大学
技术研发日:
技术公布日:2025/1/16
- 还没有人留言评论。精彩留言会获得点赞!