一种电力巡检无人机及自动避障控制系统的制作方法
本发明属于电力巡检,具体的说是一种电力巡检无人机及自动避障控制系统。
背景技术:
1、传统的人工电网巡检方式存在劳动强度高、效率低、巡视视角受限等问题;无人机具有响应速度快、自动化程度高、应用范围广、经济性好、巡视质量高等特点,无人机技术的快速发展为电力巡检提供了新平台;其中旋翼无人机可见光巡检主要应用于输电线路常规精益化巡检中,主要巡检内容包括:杆塔本体、绝缘子、附属设置等;利用多旋翼无人机搭载的可见光设备采集输电线路设备相关信息,巡检任务完成后,地面工作人员对采集的图片信息进行查看,对发现的缺陷,根据检修计划制定相应的检修方案;
2、无人机在电力巡检中优势在于减轻运维人员室外工作强度,提高工作效率与运维人员安全性,但实际应用中也发现存在一些不足:
3、1.单次采集数据量有限,采集有效性低,在巡检过程中对巡检目标需要多次拍摄才能弥补由于任务载荷对焦失败的不足,无法准确对准目标等问题,前端拍摄大量信息多为无效性信息,影响巡检工作;
4、2.数据采集受到污垢的影响,导致采集区域或者目标无法精确采集,影响巡检工作;
5、3.数据采集受限制,无人机受飞行角度或者采集角度问题,无法对细小环境进行采集,导致无人机的数据采集受到限制或者影响,影响巡检工作。
技术实现思路
1、为了弥补现有技术的不足,解决上述的技术问题;本发明提出了一种电力巡检无人机及自动避障控制系统。
2、本发明解决其技术问题所采用的技术方案是:本发明提出了一种电力巡检无人机及自动避障控制系统,包括飞行平台,且飞行平台上安装有旋翼、动力装置、控制装置和采集传输装置;所述飞行平台包括:
3、起落架,所述起落架安装于飞行平台底部,且起落架底部滑动连接有支撑杆,支撑杆位于相邻起落架之间;所述支撑杆一端位于起落架内,另一端位于相邻起落架之间,支撑杆远离起落架的一端铰接有延长杆;所述延长杆的端部铰接有多个夹持板,延长杆与夹持板之间设有马达,马达用于驱动相邻夹持板靠近夹持建筑固定,延长杆带动支撑杆的转动角度小于度;
4、一号管,所述一号管安装于飞行平台底部,一号管为倾斜设置,且一号管内滑动连接有二号管;所述二号管的一端位于一号管内,另一端位于飞行平台内部,且一号管内设有电动伸缩杆,电动伸缩杆的一端与二号管一端连接,当二号管伸出时,二号管的端部位于采集传输装置的拍摄范围内;飞行平台内设有水箱,水箱内存储有清洗溶液,水箱与二号管通过水管连接。
5、优选的,所述一号管表面均匀开设有滑槽,且二号管上设置的滑杆滑动于滑槽内,滑杆的端部转动连接有转轴,滑杆与转轴转动接触的两者表面之间设有胶块;所述滑槽内均匀设有驱动块,转轴上靠近驱动块的表面均匀设有联动块,且联动块为环形分布,联动块接触驱动块;所述转轴表面远离联动块的部位设有摆动杆,且摆动杆朝向一号管的一侧设有遮挡布,当转轴远离一号管端部时,摆动杆带动遮挡布收纳靠近一号管,当转轴靠近一号管端部时,摆动杆带动遮挡布展开;所述二号管上设有摄像头,且摄像头远离二号管端部;所述一号管内壁设有清洁刷,且清洁刷接触摄像头。
6、优选的,每个所述遮挡布的中间靠底部位置设有弹性的拉绳,且拉绳的末端与远离拉绳首端的摆动杆一侧连接,当摆动杆带动遮挡布展开时,拉绳受拉伸长,当摆动杆带动遮挡布收纳时,拉绳缩短拉扯遮挡布中间部位拱起,并覆盖在其余摆动杆表面。
7、优选的,所述二号管端部设有喷嘴组件,且喷嘴组件形状为管状,喷嘴组件表面设有l形的拨动杆,一号管内壁设有弧形板,弧形板远离一号管端部的表面设为斜面,且弧形板的斜面接触拨动杆顶部。
8、优选的,所述摆动杆端部设有夹块,且夹块数量为二,夹块位于相互对应的两个摆动杆端部,延长杆、夹持板和夹块均为绝缘材质;所述摆动杆和夹块远离一号管的表面设有刻度表。
9、优选的,所述一号管与飞行平台底部为球接,且飞行平台内底部设有电机,电机的输出端设有转杆;所述转杆上均匀设有转轮,且一号管上对应转轮的位置均设有驱动绳,每个驱动绳的一端收卷在所对应的转轮上;每个所述转轮内圈均设有一号电磁铁,且单个一号电磁铁通电时,所对应的转轮和转杆紧密吸附,并同时转动。
10、优选的,所述旋翼远离飞行平台的位置设有保护板,且保护板为弧形;所述保护板内部空心设置,且保护板内通过弹簧滑动连接有一号滑板,保护板内设有二号电磁铁,二号电磁铁靠近一号滑板;所述保护板内安装有一号气囊,一号气囊内存储有固体,且一号气囊靠近一号滑板的内壁上设有一号尖刺,一号气囊内设有一号胶囊,一号胶囊内存储有溶液,一号尖刺朝向一号胶囊;所述保护板远离旋翼的一侧开设一号保护槽,且一号胶囊一部分位于保护板内部,另一部分收纳于一号保护槽内。
11、优选的,所述起落架内部为空心设置,且起落架内通过弹簧滑动连接有二号滑板,起落架内设有三号电磁铁,三号电磁铁靠近二号滑板;所述起落架内设有二号气囊,二号气囊内存储有固体,且二号气囊靠近二号滑板的内壁上设有二号尖刺,二号气囊内设有二号胶囊,二号胶囊内存储有溶液,二号尖刺朝向二号胶囊;所述起落架相互远离的一侧开设有二号保护槽,且二号胶囊一部分位于二号保护槽内,另一部分位于起落架内。
12、优选的,所述起落架底部开设有固定槽,且支撑杆贯穿固定槽滑动;所述固定槽靠近顶部的内壁均匀设有卡块,支撑杆表面均匀开设有卡槽,卡槽内设有传感器;当支撑杆远离固定槽顶部内壁时,卡槽与卡块脱离,当支撑杆靠近固定槽时,卡槽与卡块结合。
13、一种适用于所述的电力巡检无人机的自动避障控制系统,所述避障控制系统植入控制装置中,且避障控制系统包括激光探测单元和路径规划单元;所述激光探测单元发射激光束并接受反射信号,将接受的反射信号发送至避障控制系统内;所述采集传输装置对飞行过程中采集的数据发送至避障控制系统中,避障控制系统结合视觉图像、红外探测和激光探测方面,对其飞行路径规划和调整,并将路径规划数据发送至控制装置中,控制装置根据路径规划控制无人机飞行。
14、本发明的有益效果如下:
15、1.本发明的一种电力巡检无人机及自动避障控制系统,通过控制装置控制马达启动,驱动两个夹持板相互靠近夹紧固定物,以达到固定延长杆的目的;延长杆固定后,采集传输装置与电力设备之间受到延长杆的限制,使得两者之间的间距变化减少或者固定不变,减少飞行平台在悬空飞行过程中产生的晃动幅度,从而提高采集过程的稳定程度,进而提高无人机巡检时的稳定程度,使得采集图像和数据更加精确,提高巡检效果。
16、2.本发明的一种电力巡检无人机及自动避障控制系统,由于无人机在清洗过程中处于稳定状态,使得无人机能够抵抗住二号管喷发所产生的反作用力,避免无人机在喷射清洗时,被反作用力所影响,导致无人机的位置改变,造成清洗效果差或者未清洗到的情况出现,从而提高无人机的对电力设备零件的清洗效果,进而提高巡检精度。
技术特征:
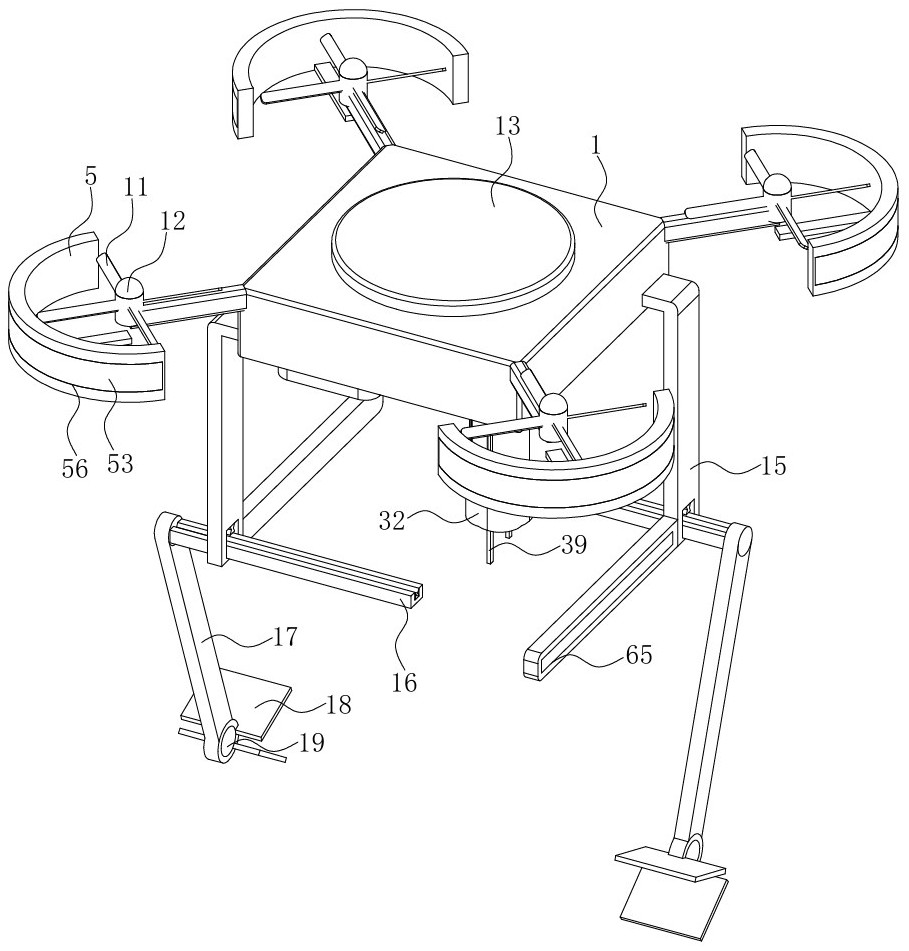
1.一种电力巡检无人机,包括飞行平台(1),且飞行平台(1)上安装有旋翼(11)、动力装置(12)、控制装置(13)和采集传输装置(14);其特征在于,所述飞行平台(1)包括:
2.根据权利要求1所述的一种电力巡检无人机,其特征在于:所述一号管(2)表面均匀开设有滑槽(24),且二号管(21)上设置的滑杆(25)滑动于滑槽(24)内,滑杆(25)的端部转动连接有转轴(26),滑杆(25)与转轴(26)转动接触的两者表面之间设有胶块(27);所述滑槽(24)内均匀设有驱动块(28),转轴(26)上靠近驱动块(28)的表面均匀设有联动块(3),且联动块(3)为环形分布,联动块(3)接触驱动块(28);所述转轴(26)表面远离联动块(3)的部位设有摆动杆(31),且摆动杆(31)朝向一号管(2)的一侧设有遮挡布(32),当转轴(26)远离一号管(2)端部时,摆动杆(31)带动遮挡布(32)收纳靠近一号管(2),当转轴(26)靠近一号管(2)端部时,摆动杆(31)带动遮挡布(32)展开;所述二号管(21)上设有摄像头(33),且摄像头(33)远离二号管(21)端部;所述一号管(2)内壁设有清洁刷(34),且清洁刷(34)接触摄像头(33)。
3.根据权利要求2所述的一种电力巡检无人机,其特征在于:每个所述遮挡布(32)的中间靠底部位置设有弹性的拉绳(35),且拉绳(35)的末端与远离拉绳(35)首端的摆动杆(31)一侧连接,当摆动杆(31)带动遮挡布(32)展开时,拉绳(35)受拉伸长,当摆动杆(31)带动遮挡布(32)收纳时,拉绳(35)缩短拉扯遮挡布(32)中间部位拱起,并覆盖在其余摆动杆(31)表面。
4.根据权利要求3所述的一种电力巡检无人机,其特征在于:所述二号管(21)端部设有喷嘴组件(36),且喷嘴组件(36)形状为管状,喷嘴组件(36)表面设有l形的拨动杆(37),一号管(2)内壁设有弧形板(38),弧形板(38)远离一号管(2)端部的表面设为斜面,且弧形板(38)的斜面接触拨动杆(37)顶部。
5.根据权利要求3所述的一种电力巡检无人机,其特征在于:所述摆动杆(31)端部设有夹块(39),且夹块(39)数量为二,夹块(39)位于相互对应的两个摆动杆(31)端部,延长杆(17)、夹持板(18)和夹块(39)均为绝缘材质;所述摆动杆(31)和夹块(39)远离一号管(2)的表面设有刻度表。
6.根据权利要求1所述的一种电力巡检无人机,其特征在于:所述一号管(2)与飞行平台(1)底部为球接,且飞行平台(1)内底部设有电机(4),电机(4)的输出端设有转杆(41);所述转杆(41)上均匀设有转轮(42),且一号管(2)上对应转轮(42)的位置均设有驱动绳(43),每个驱动绳(43)的一端收卷在所对应的转轮(42)上;每个所述转轮(42)内圈均设有一号电磁铁(44),且单个一号电磁铁(44)通电时,所对应的转轮(42)和转杆(41)紧密吸附,并同时转动。
7.根据权利要求1所述的一种电力巡检无人机,其特征在于:所述旋翼(11)远离飞行平台(1)的位置设有保护板(5),且保护板(5)为弧形;所述保护板(5)内部空心设置,且保护板(5)内通过弹簧滑动连接有一号滑板(51),保护板(5)内设有二号电磁铁(52),二号电磁铁(52)靠近一号滑板(51);所述保护板(5)内安装有一号气囊(53),一号气囊(53)内存储有固体,且一号气囊(53)靠近一号滑板(51)的内壁上设有一号尖刺(54),一号气囊(53)内设有一号胶囊(55),一号胶囊(55)内存储有溶液,一号尖刺(54)朝向一号胶囊(55);所述保护板(5)远离旋翼(11)的一侧开设一号保护槽(56),且一号胶囊(55)一部分位于保护板(5)内部,另一部分收纳于一号保护槽(56)内。
8.根据权利要求1所述的一种电力巡检无人机,其特征在于:所述起落架(15)内部为空心设置,且起落架(15)内通过弹簧滑动连接有二号滑板(6),起落架(15)内设有三号电磁铁(61),三号电磁铁(61)靠近二号滑板(6);所述起落架(15)内设有二号气囊(62),二号气囊(62)内存储有固体,且二号气囊(62)靠近二号滑板(6)的内壁上设有二号尖刺(63),二号气囊(62)内设有二号胶囊(64),二号胶囊(64)内存储有溶液,二号尖刺(63)朝向二号胶囊(64);所述起落架(15)相互远离的一侧开设有二号保护槽(65),且二号胶囊(64)一部分位于二号保护槽(65)内,另一部分位于起落架(15)内。
9.根据权利要求8所述的一种电力巡检无人机,其特征在于:所述起落架(15)底部开设有固定槽(7),且支撑杆(16)贯穿固定槽(7)滑动;所述固定槽(7)靠近顶部的内壁均匀设有卡块(71),支撑杆(16)表面均匀开设有卡槽(72),卡槽(72)内设有传感器(73);当支撑杆(16)远离固定槽(7)顶部内壁时,卡槽(72)与卡块(71)脱离,当支撑杆(16)靠近固定槽(7)时,卡槽(72)与卡块(71)结合。
10.一种适用于权利要求1-9中任一项所述的电力巡检无人机的自动避障控制系统,其特征在于:所述避障控制系统植入控制装置(13)中,且避障控制系统包括激光探测单元和路径规划单元;所述激光探测单元发射激光束并接受反射信号,将接受的反射信号发送至避障控制系统内;所述采集传输装置(14)对飞行过程中采集的数据发送至避障控制系统中,避障控制系统结合视觉图像、红外探测和激光探测方面,对其飞行路径规划和调整,并将路径规划数据发送至控制装置(13)中,控制装置(13)根据路径规划控制无人机飞行。
技术总结
本发明属于电力巡检技术领域,具体的说是一种电力巡检无人机及自动避障控制系统,包括飞行平台,且飞行平台上安装有旋翼、动力装置、控制装置和采集传输装置,动力装置用于驱动旋翼转动带动飞行平台巡检,控制装置用于对飞行平台的控制;通过控制装置控制马达启动,驱动两个夹持板相互靠近夹紧固定物,以达到固定延长杆的目的;延长杆固定后,采集传输装置与电力设备之间受到延长杆的限制,使得两者之间的间距变化减少或者固定不变,减少飞行平台在悬空飞行过程中产生的晃动幅度,从而提高采集过程的稳定程度,进而提高无人机巡检时的稳定程度,使得采集图像和数据更加精确,提高巡检效果。
技术研发人员:余少锋,钟建栩,韩吉双,陈黎,曹锋,黄发满,李静,崔玮洪,王伟,钟保强,游锦鹏,林泽鑫,廖崇阳,席凌之,严鑫,蔡泽晗,李日棠,朱俊威
受保护的技术使用者:南方电网储能股份有限公司信息通信分公司
技术研发日:
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!